Hello,
In this update I will list some findings mainly focused in the application of Nylon Helix muscles as actuators and the beginnings of experiments to bring about increased efficiencies. For the former I have constructed a wooden rig meant to mimic a human arm's bicep and tricep (Pictured and filmed below is actually the third version). In the video you can see me powering the bicep and having the forearm move up, it's most easily seen by following the red stick in the bottom right hand corner.

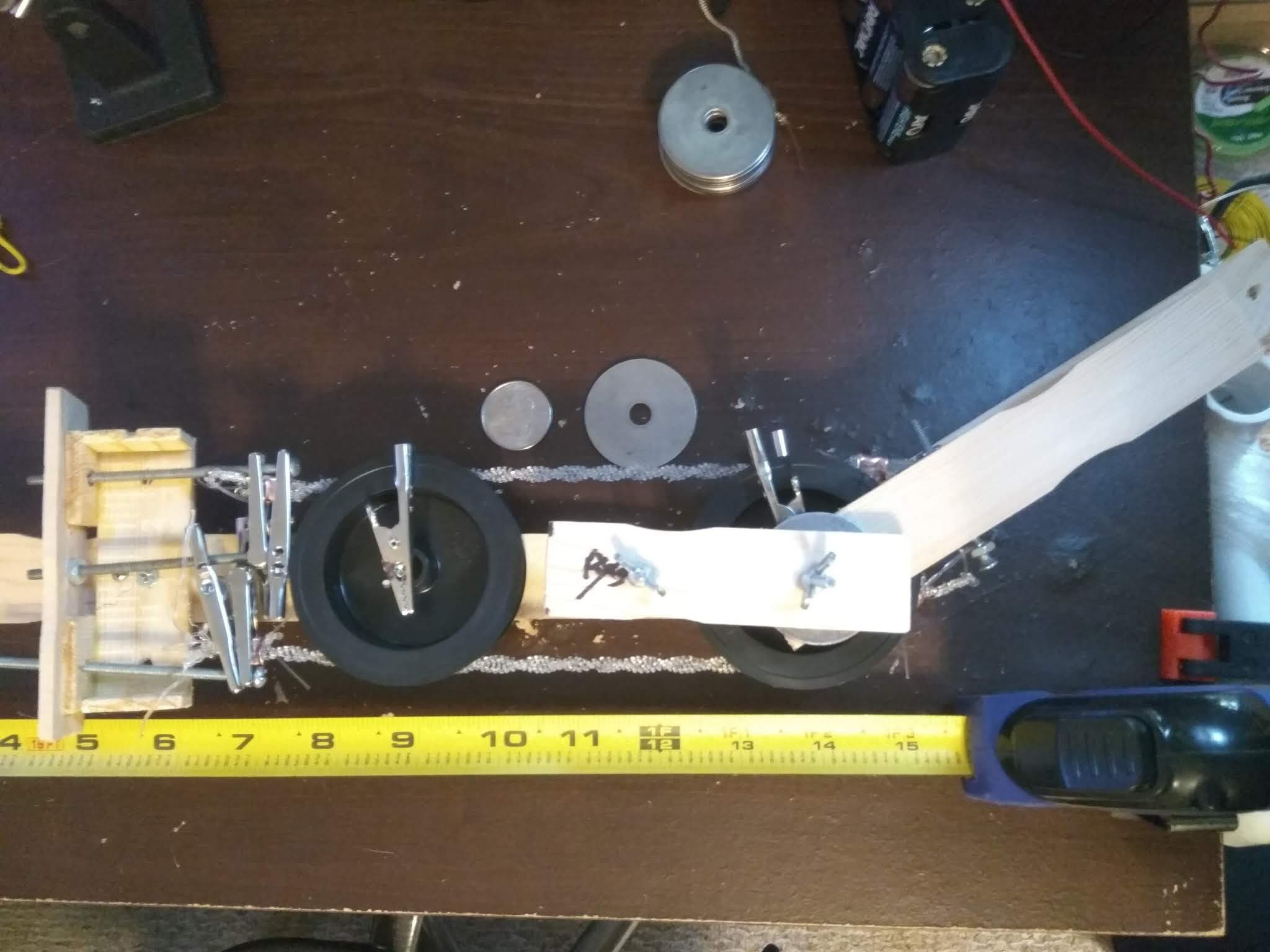

 The rig has several problems including the cheap wood flexing under the strain and causing pinching at the joint. Additionally this rig is a little too big for the size of the muscles, meaning a full contraction does not bring the forearm to where a human arm would rest.
The rig has several problems including the cheap wood flexing under the strain and causing pinching at the joint. Additionally this rig is a little too big for the size of the muscles, meaning a full contraction does not bring the forearm to where a human arm would rest.Also as part of recent work I have been attempting to increase contraction distance and speed. Which means creating a lot of helix and hetero/homeo-cordial muscles. One of my recent findings was that with my new deep sea fishing line annealing actually decreased the Helix contractions from 16.5% unannealed to 13% when annealed for any time.


As for my next steps I am looking into creating a series of videos that would show someone from beginning until end how I create these material actuators. I am also going to be running further experiments in manufacturing that I hope to increase my contractions to around 20%. After which I will then build an Arm Rig v2, most likely from PVC and get some footage of that out.
Lastly I am leaning towards some sort of crowdfunding, I think with even a small amount of funding I could create some machines that would allow faster experimentation and thus greater potential! And maybe get a prototype material exosuit working. ;) Stay tuned.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.