Joseph Primmer
Joseph Primmer-
Log 004: PCB Assembly
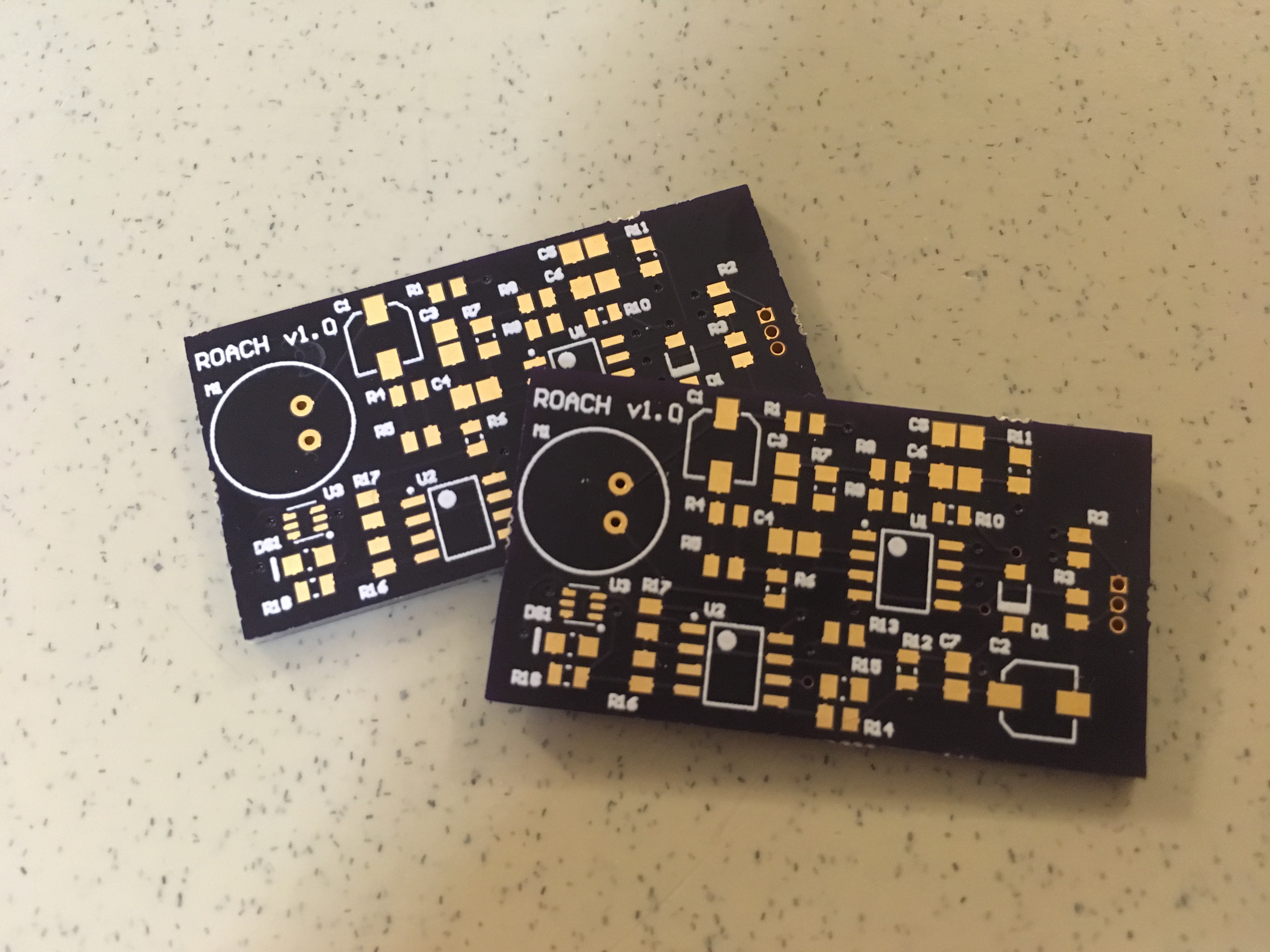
05/18/2018 at 00:34 • 0 commentsMy PCBs from @oshpark arrived today!
![]()
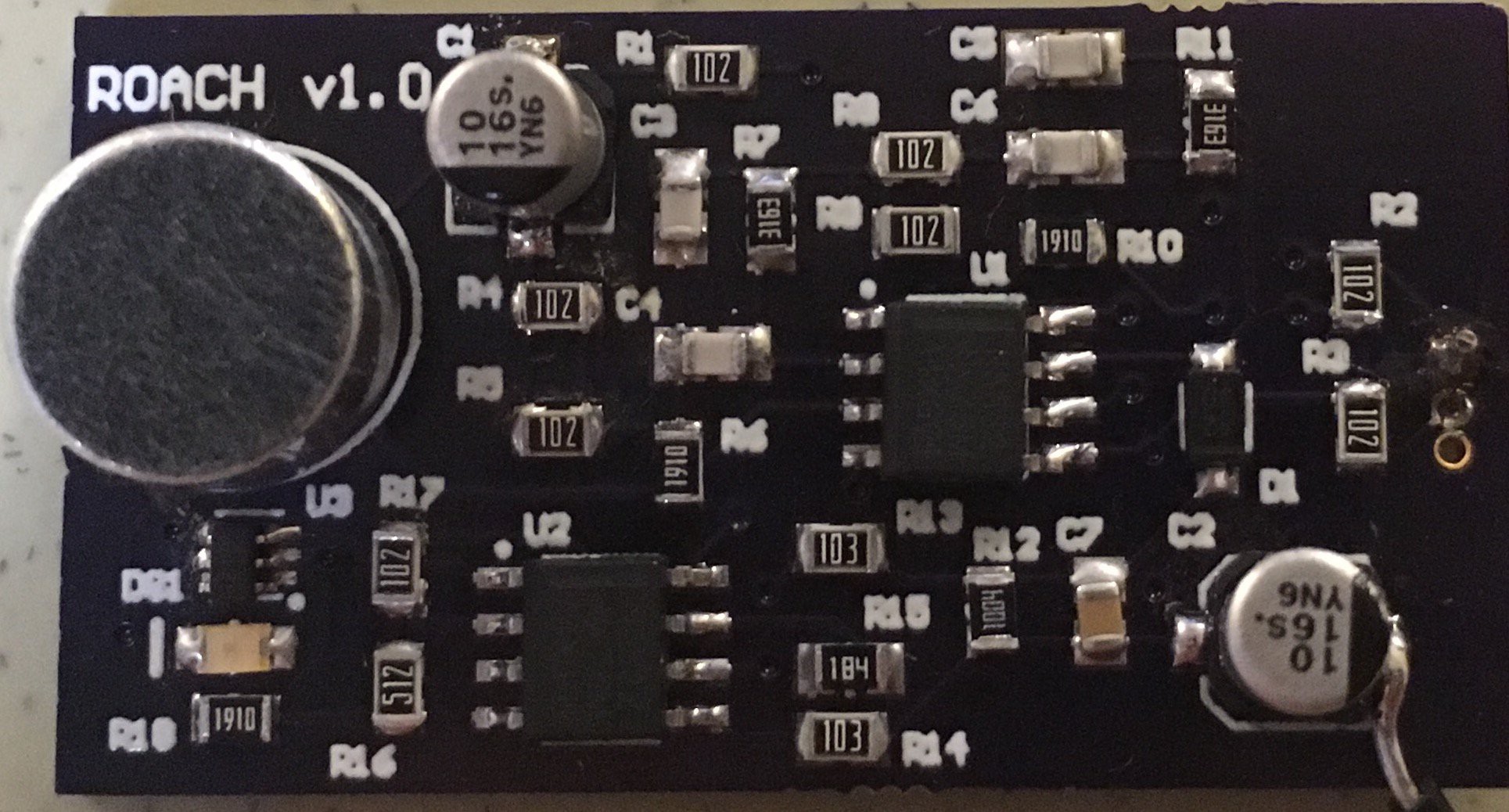
Here is one assembled:
![]()
I don't know whether these work yet because I haven't gotten around to testing them.
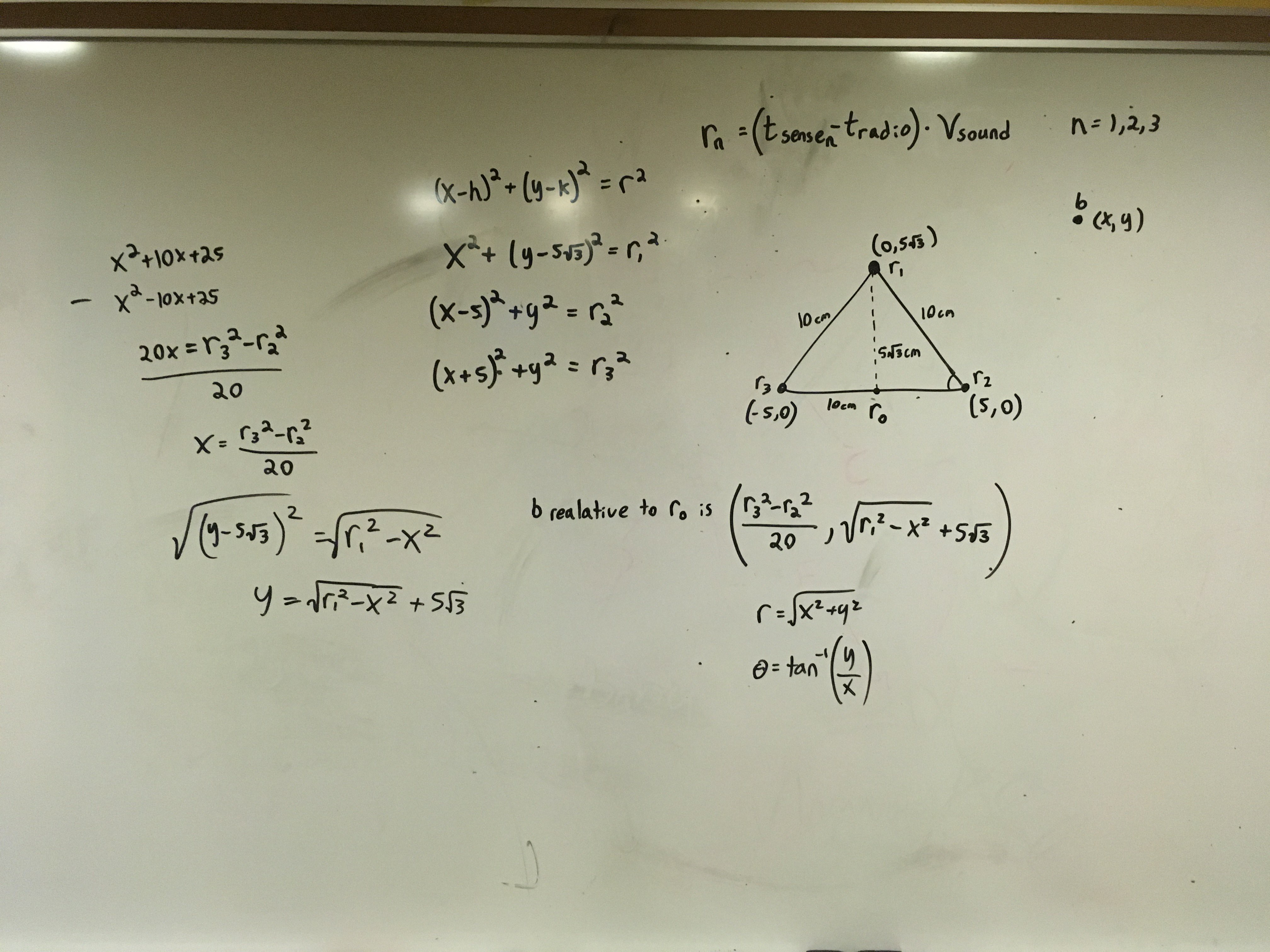
I also worked out some of the math for using times of arrival to calculate location:
![]()
-
Log 003: PCB Design
05/09/2018 at 20:08 • 0 commentsIt's my last day of classes, so I decided to celebrate by sitting down for a few hours and designing the PCB for the ROACH sensor module.
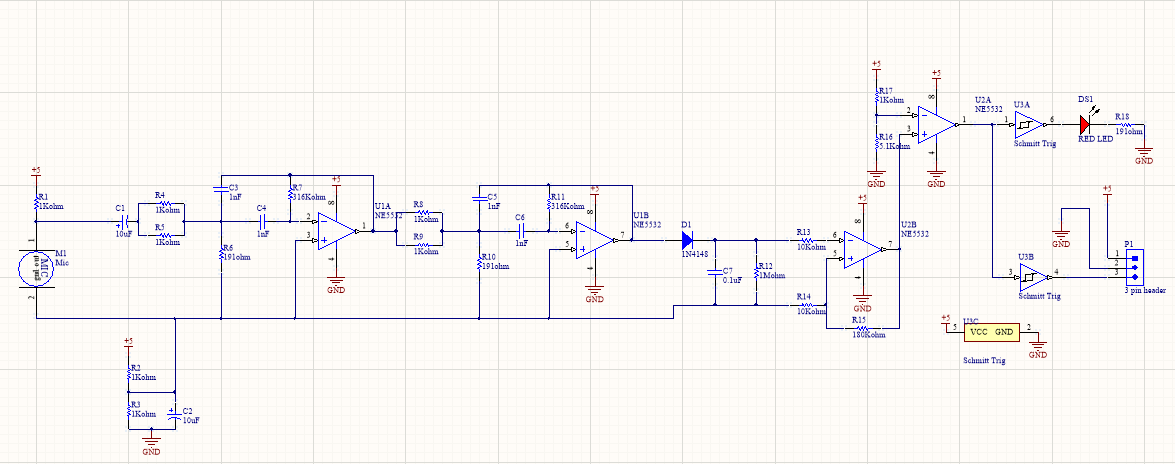
This is the schematic I came up with for the PCB:
![]()
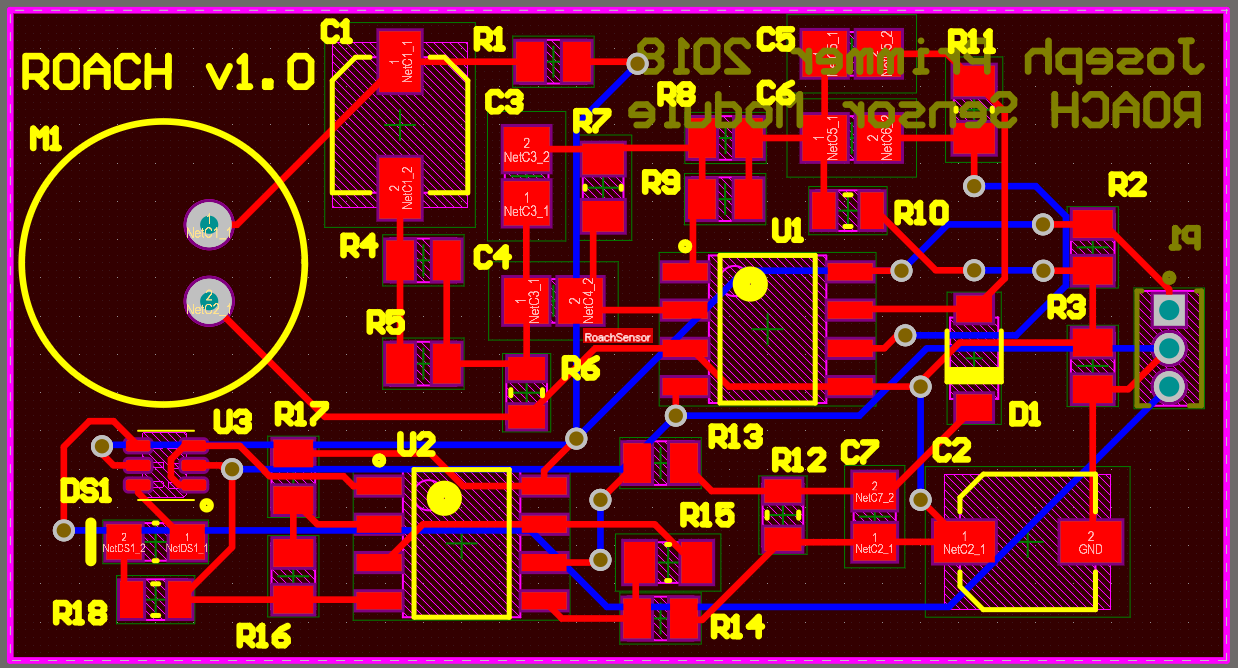
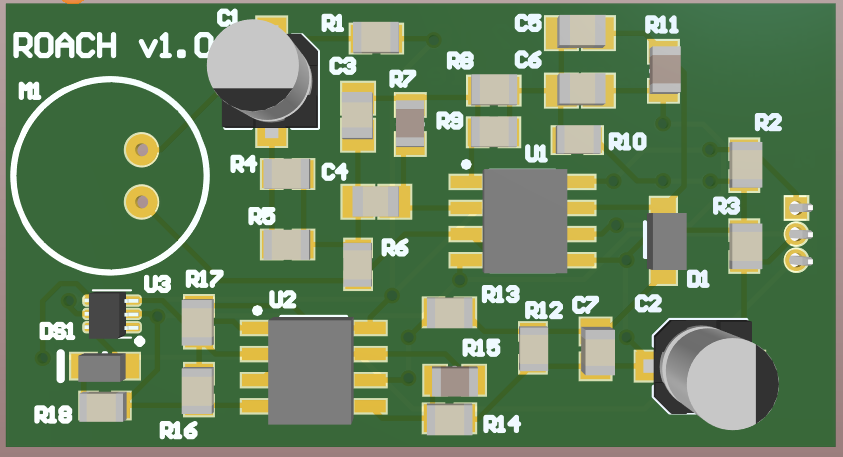
This is the PCB itself. It has a 3 pin header for 5V, GND, and Digital Output:
![]()
![]()
I am fairly new to PCB design and feedback would be greatly appreciated!
Also, I am probably not going to order these today. I am going to wait until tomorrow, so I can look over my design again when I'm more awake and then order.
-
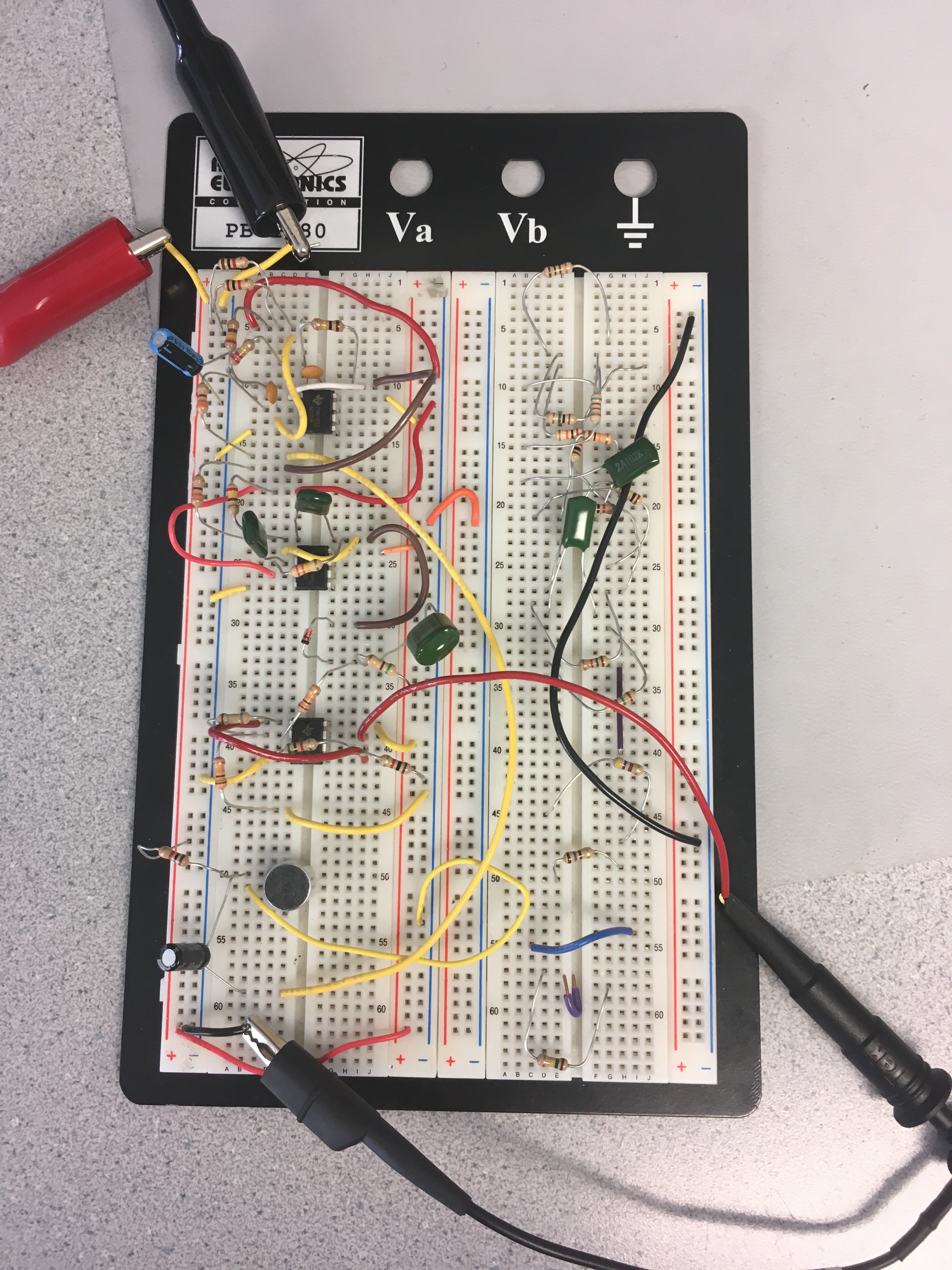
Log 002: Breadboard Prototype and Schematic
05/05/2018 at 17:46 • 0 commentsWednesday:
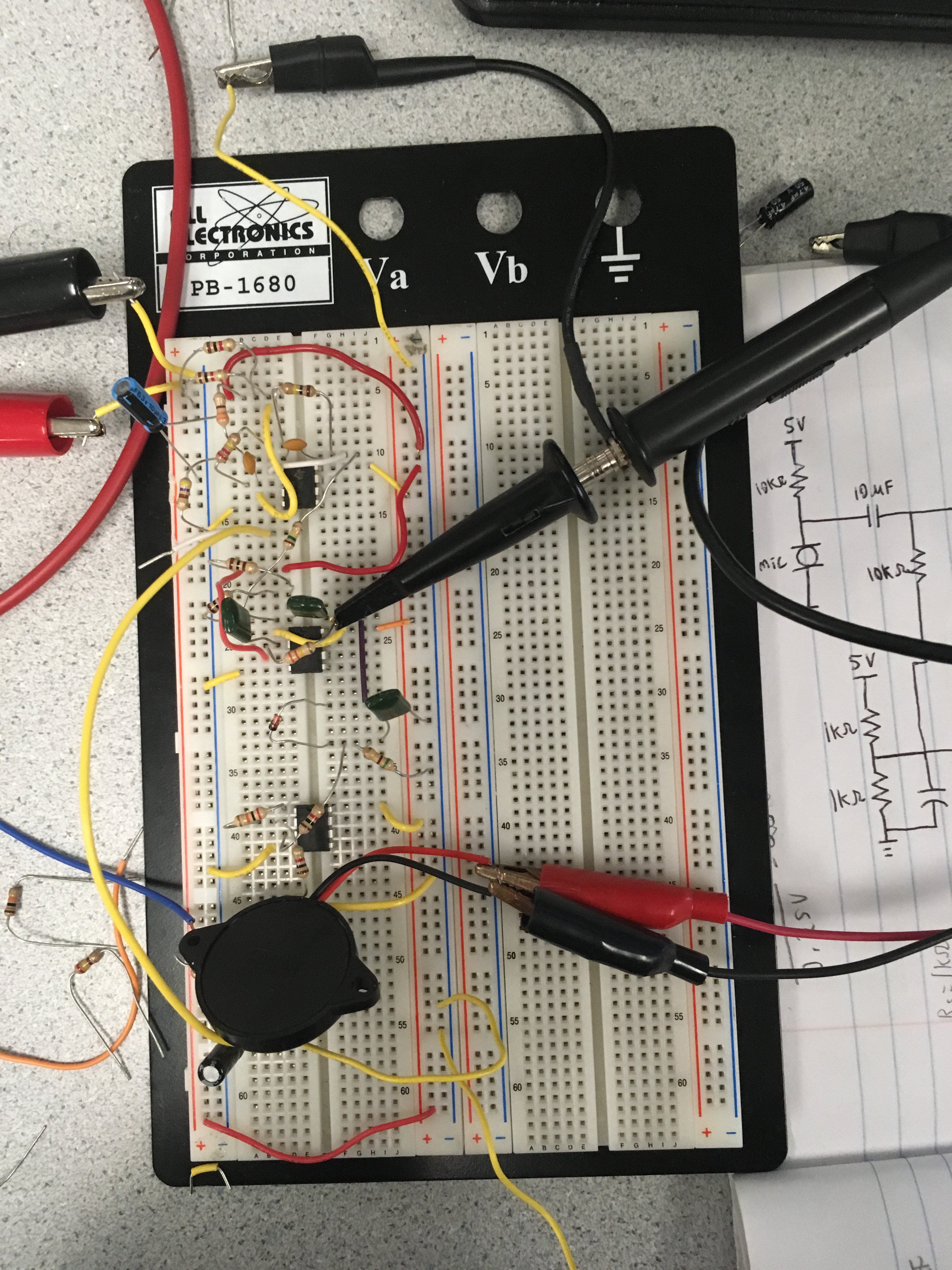
I continued my breadboard prototyping by trying to get my mic & filters to respond to a piezo speaker, however, no matter what gain on my filters I tried, I couldn't get a good response:
![]()
I was on the verge of giving up when Professor @Bruce Land suggested I use one of his "really loud" 24kHz ultrasonic transducers. This transducer showed much more promise than the piezo:
![]()
![]()
I could get a response on an oscilloscope even when the transducer wasn't playing at its 24kHz resonance frequency. I decided to re-tune my filters for 24kHz in order to take full advantage of the transducer's abilities.
Thursday:
I ran around in circles for several hours because I had accidentally shorted my voltage reference to ground. :(
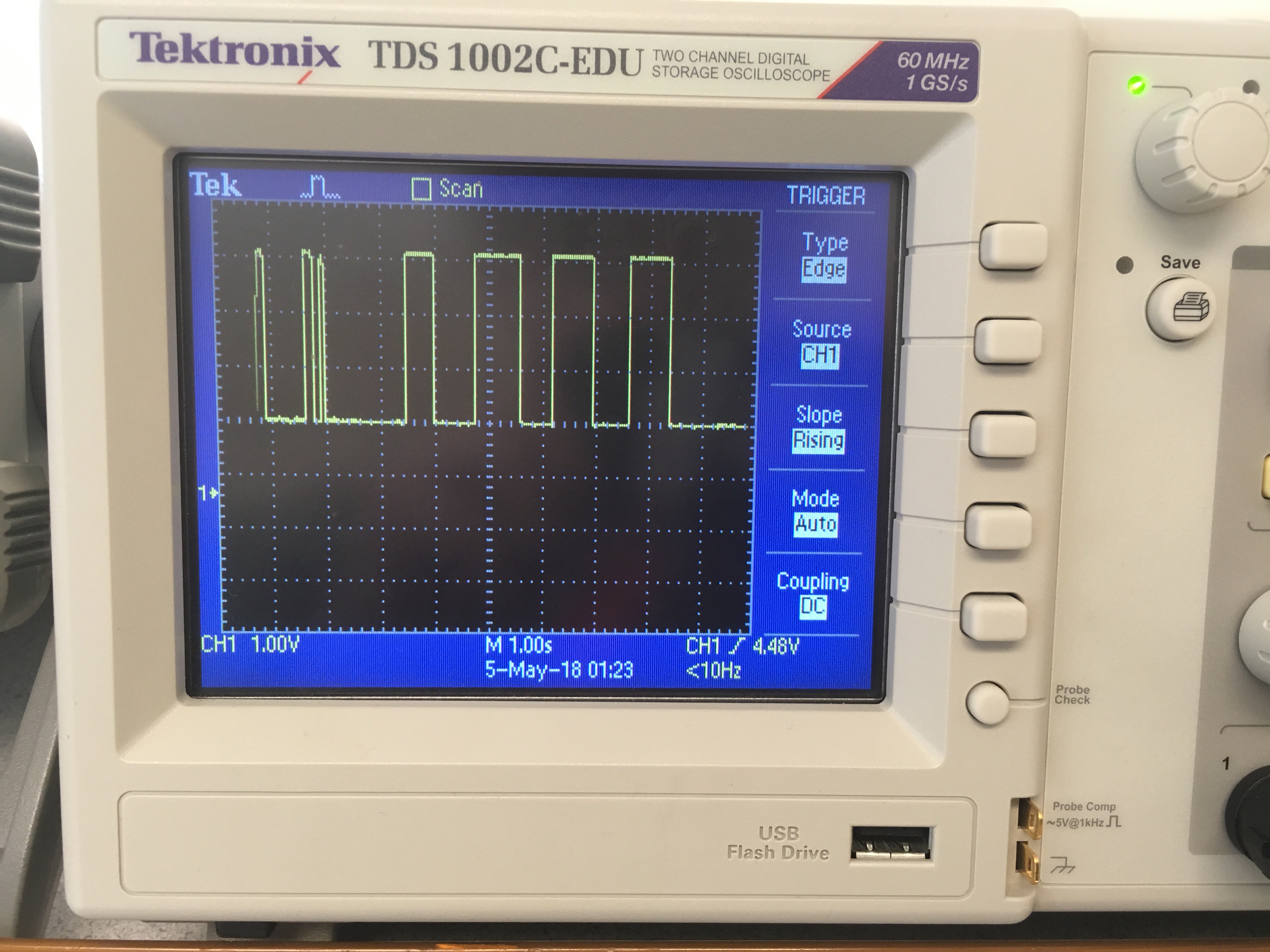
Friday:
After re-tuning my filters and putting that signal through an envelope detector, amplifier, and comparator, I was able to get a fairly clean output that was either at 4.4V or 1.4V based on whether the transducer was playing or not. I could even get a range of about 2 meters (may try to improve this in latter designs) in the room with the occupancy sensors!
![]()
![]()
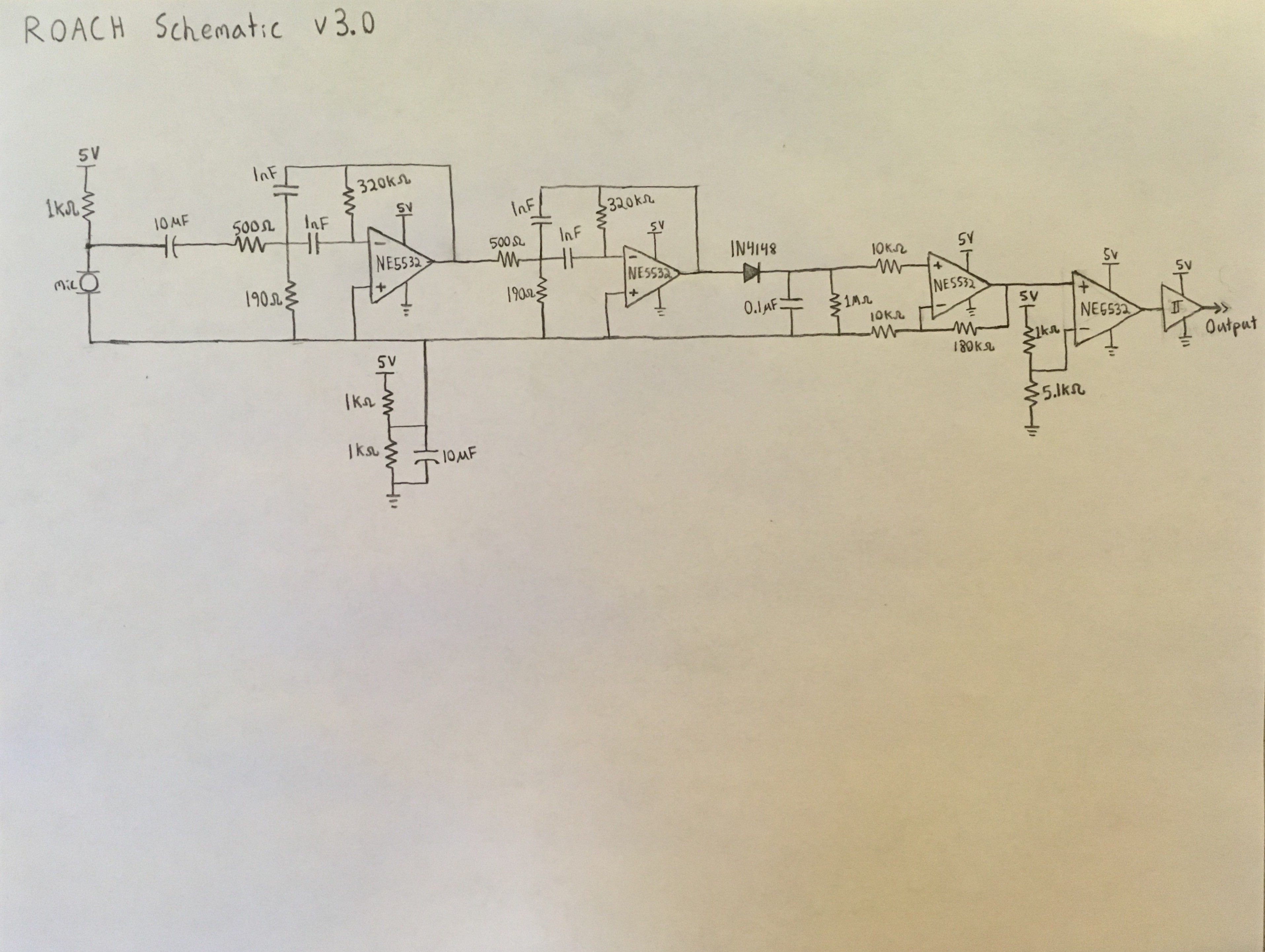
4.4V and 1.4V isn't quite a good digital signal, so I will probably put this through a Schmitt trigger as well. I could also use a differential drive on the transducer to increase the range a bit.
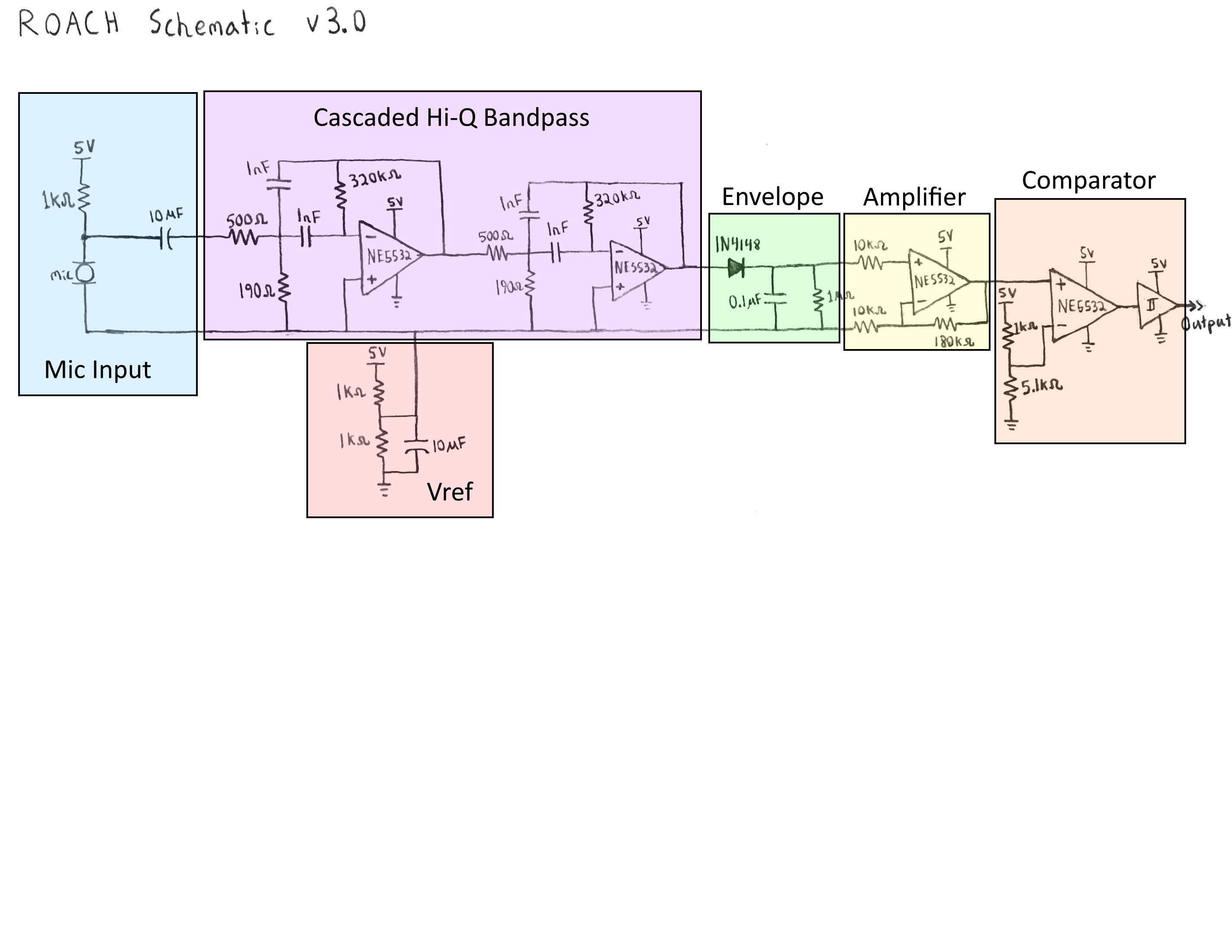
Here is the schematic I will probably use for the PCB I plan to design (I may start out with just designing small sensor modules instead of a full board with a microcontroller on it. This will make it easier to experiment with different microcontrollers):
![]()
![]()
-
Log 001: Design Plan and Initial Experimentation
05/01/2018 at 15:09 • 0 commentsJune 4th is going to be a tough deadline to make for this project because I would like to design a PCB for the module that will contain the filters and microcontroller (perhaps a PIC32). I'd like to be able to assemble the PCB at school where I have access to nice equipment and decent soldering irons meaning I need to design and send out the PCBs ASAP (school ends May 22nd).
Here is my proposed schedule:
- April 23rd - May 5: Breadboard experimentation & Filter design + Proof of concept to show I can use a set of two microphones/filters to measure a distance
- May 5 - May 9: PCB design (send out PCBs to be created on May 9th)
- May 9 - May 15: try not to fail my ECE exams
- May 15 - May 22: Write microcontroller firmware + PCB assembly + cardboard prototype + beacon prototype
- May 22 - June 4: Integrate Module into a basic robot
- June 4+ (Improvements phase):
- Design 3D model of module and beacon to be 3D printed
- Integrate module into a more practical application, i.e.: shopping cart or video robot (I might do this as part of a class I'm taking next semester)
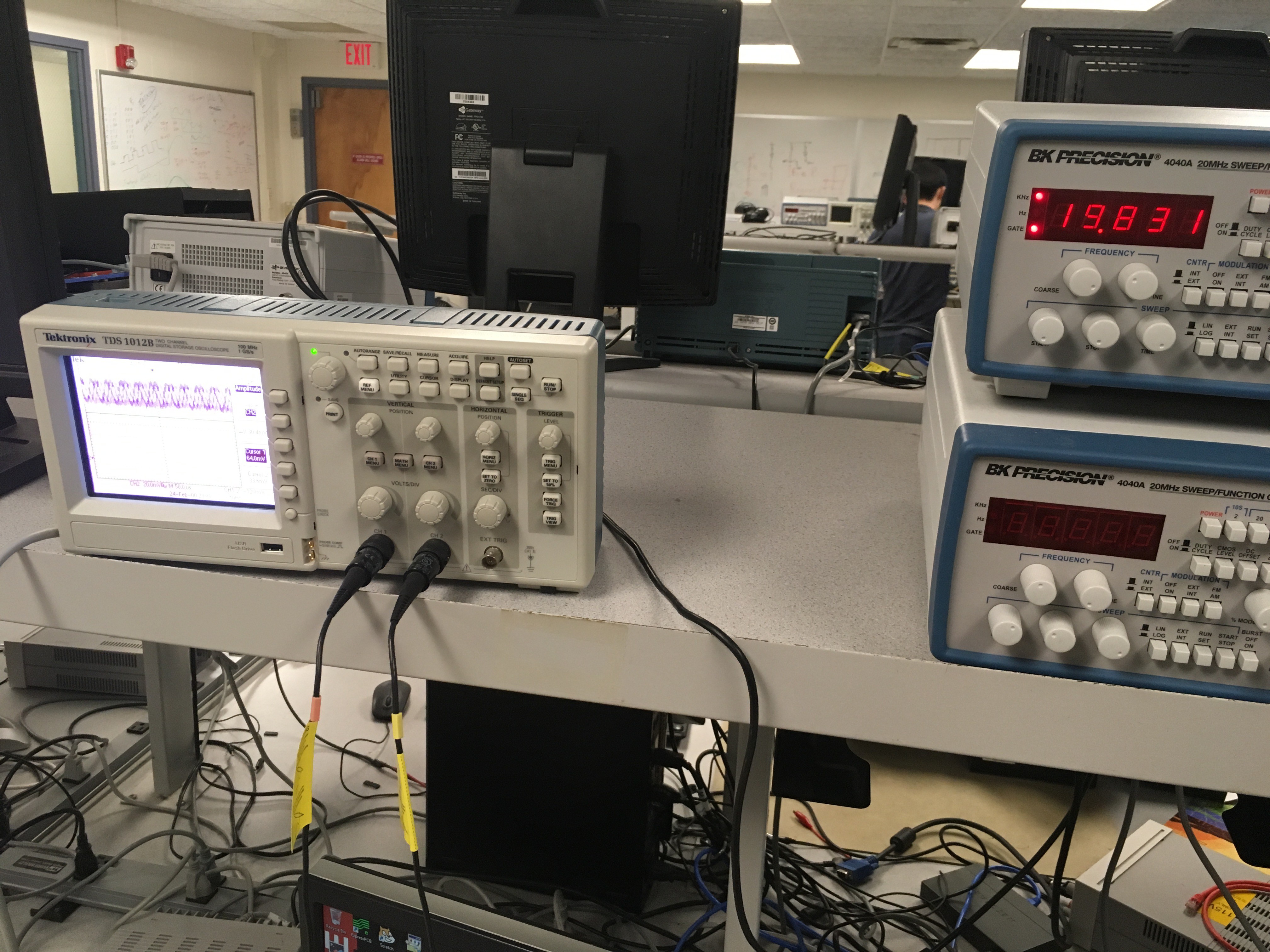
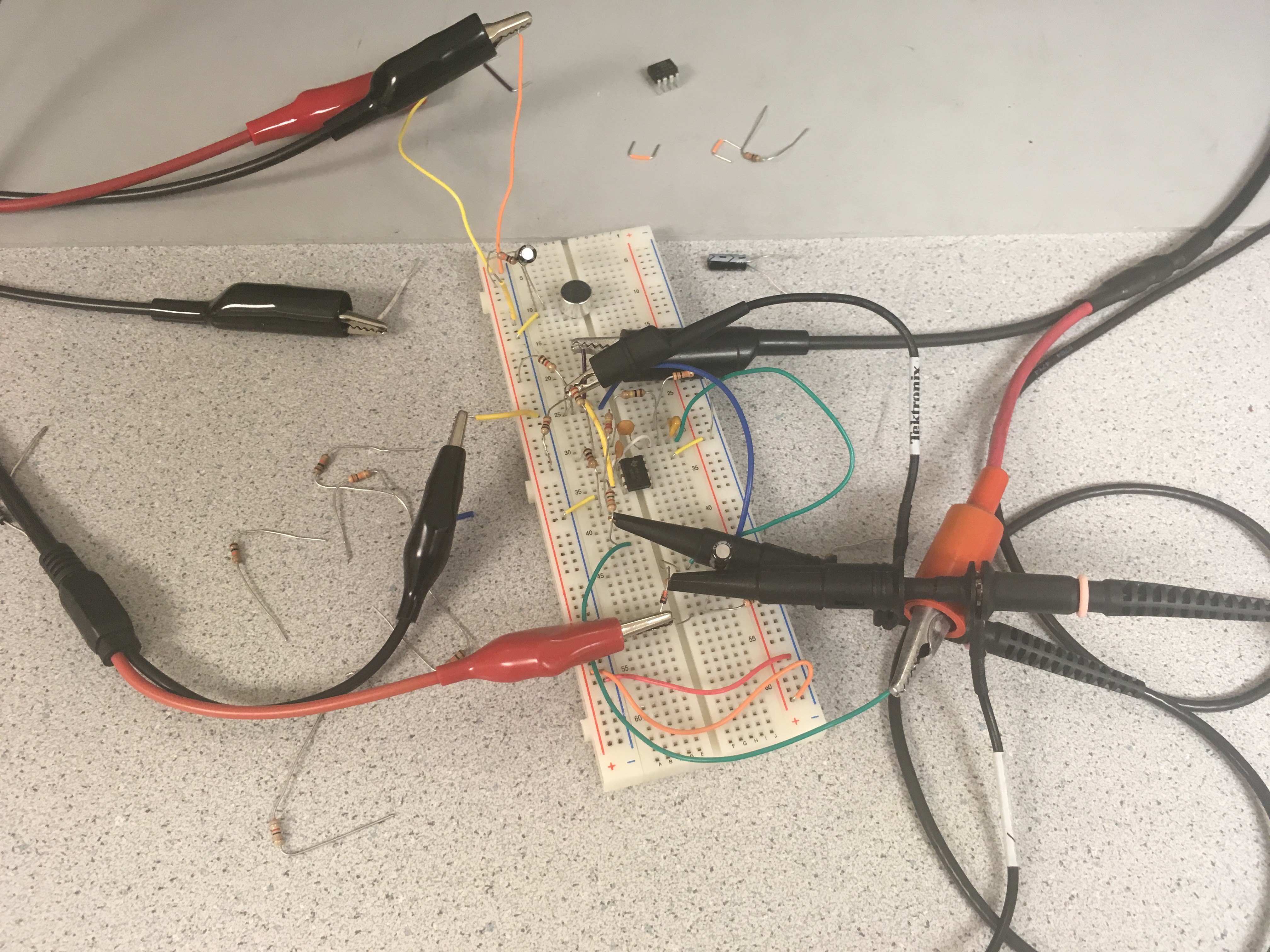
My progress so far has been getting the Hi-Q band pass filters mostly working when hooked up to a function generator (I need to adjust the gain a bit and maybe cascade two of them together). I've also been able to figure out the envelope detector. Here are some pics:
![]()
My setup.
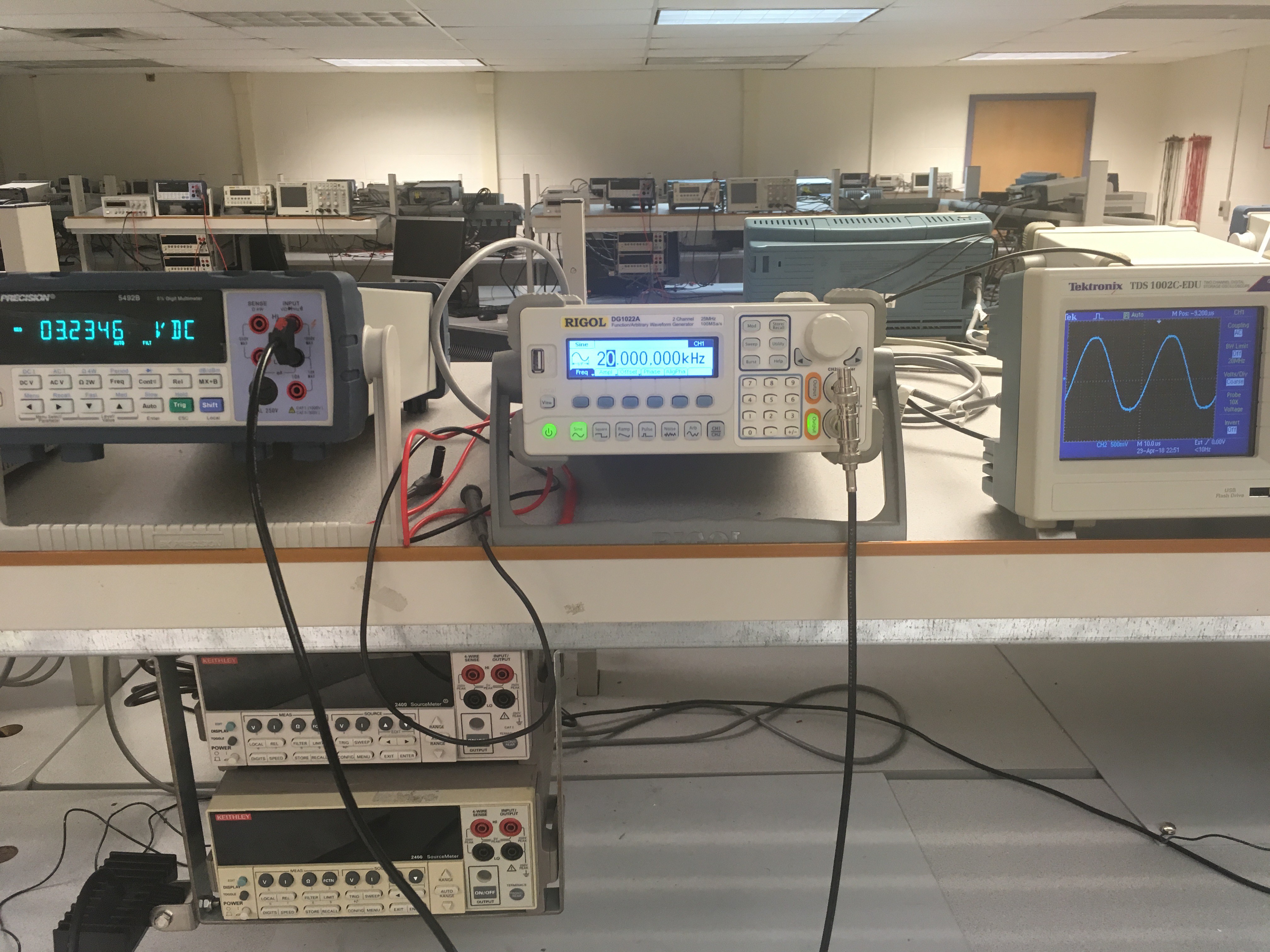
![]()
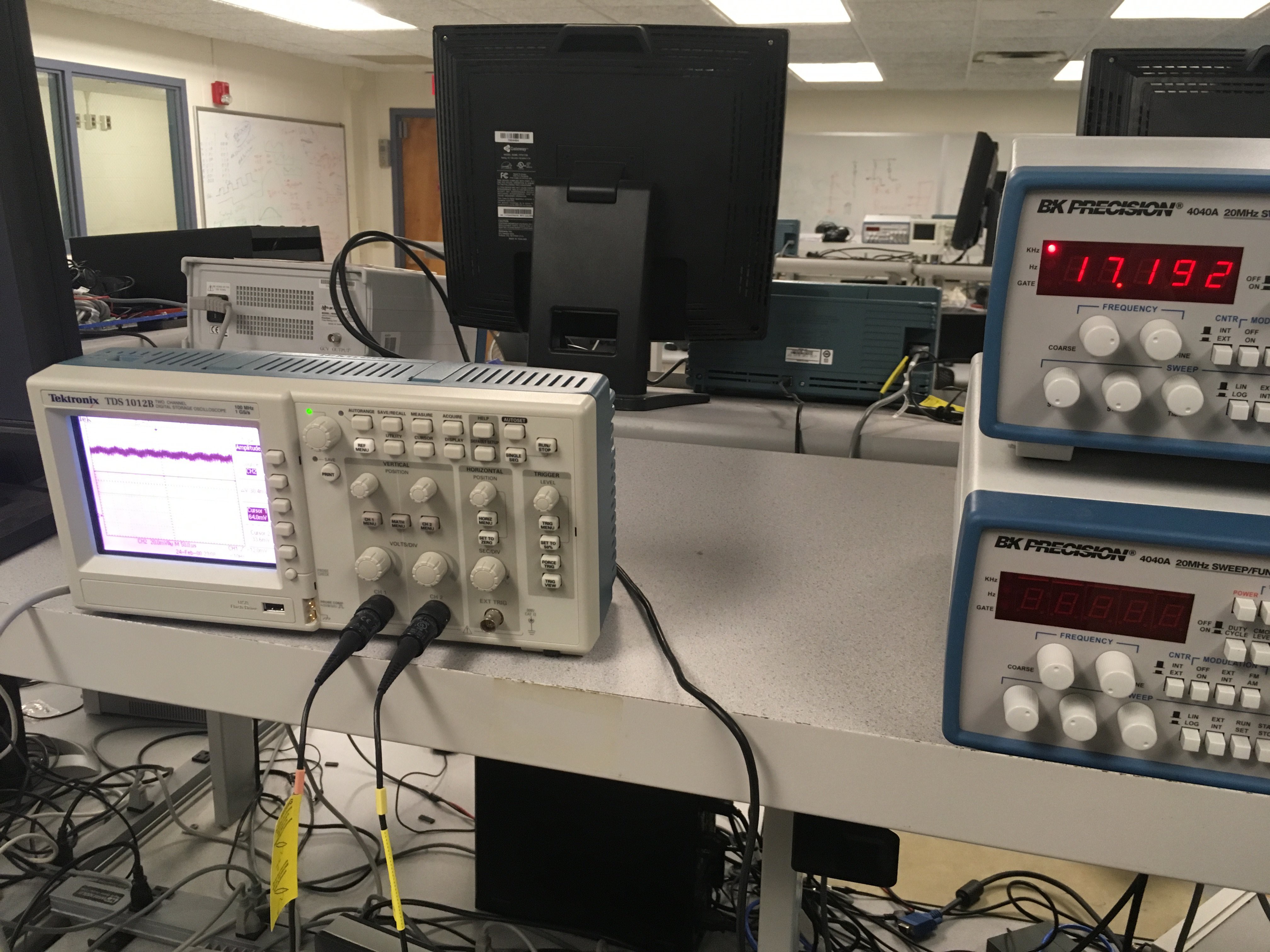
At 20kHz the signal is allowed to pass through and the envelope detector puts out about 3.2V.
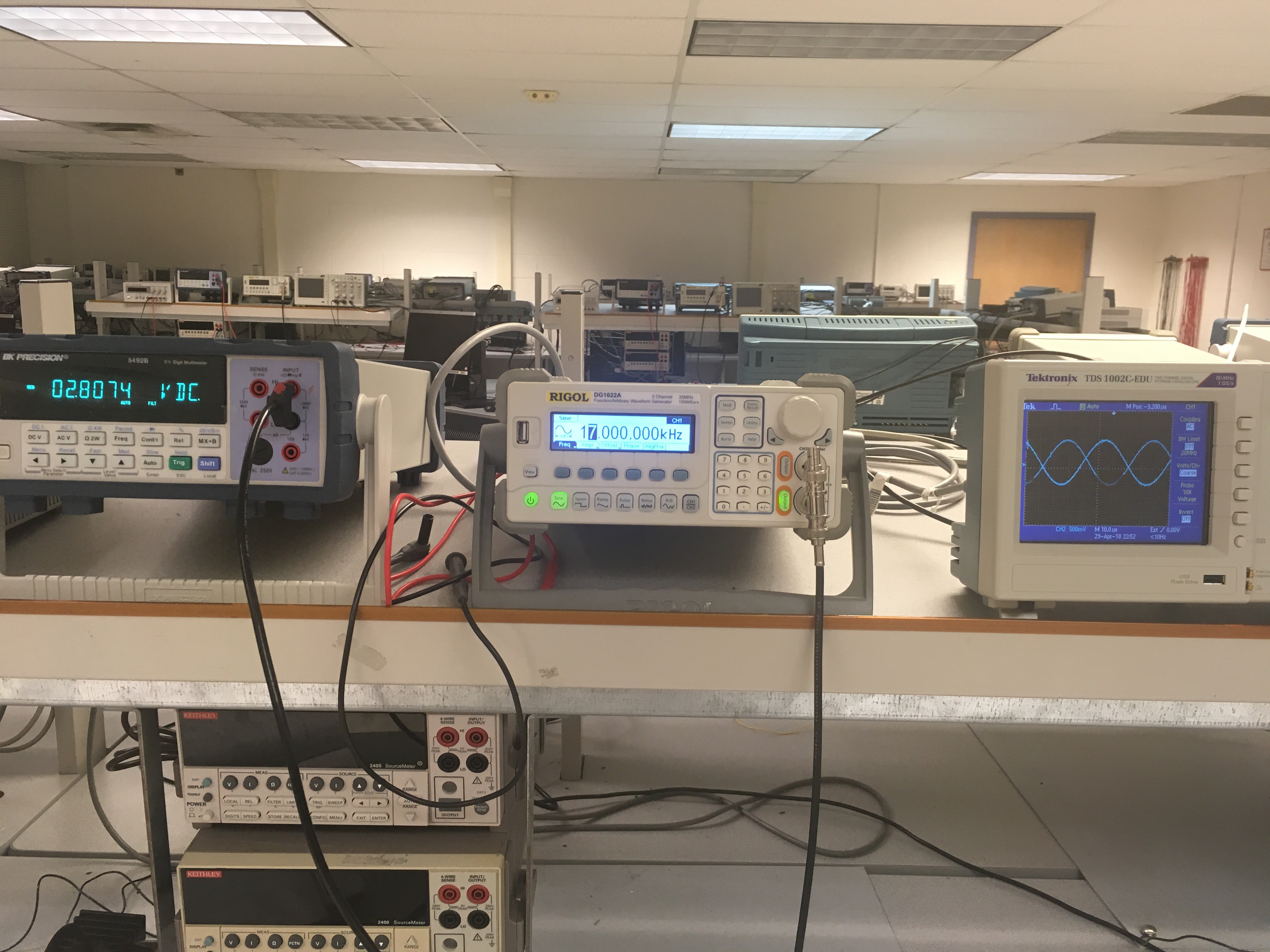
![]()
At 17kHz the signal can be seen to be attenuated on the oscilloscope and the envelope detector only puts out 2.8V.
When I tried to interface this system with my microphones however, everything went awry! I kept getting this weird 20-25kHz signal that seemed to be coming out of nowhere! After looking around the room however, I found the culprit:
![]()
An occupation sensor with ultrasonic transducers on it. Darn. Guess I can't test in this lab. (I guess that also means robots with this module can't be used in rooms with occupancy sensors).
Location Sensor Module (ROACH)
A device that can calculate its location relative to a 24kHz sonic beacon