 M. Bindhammer
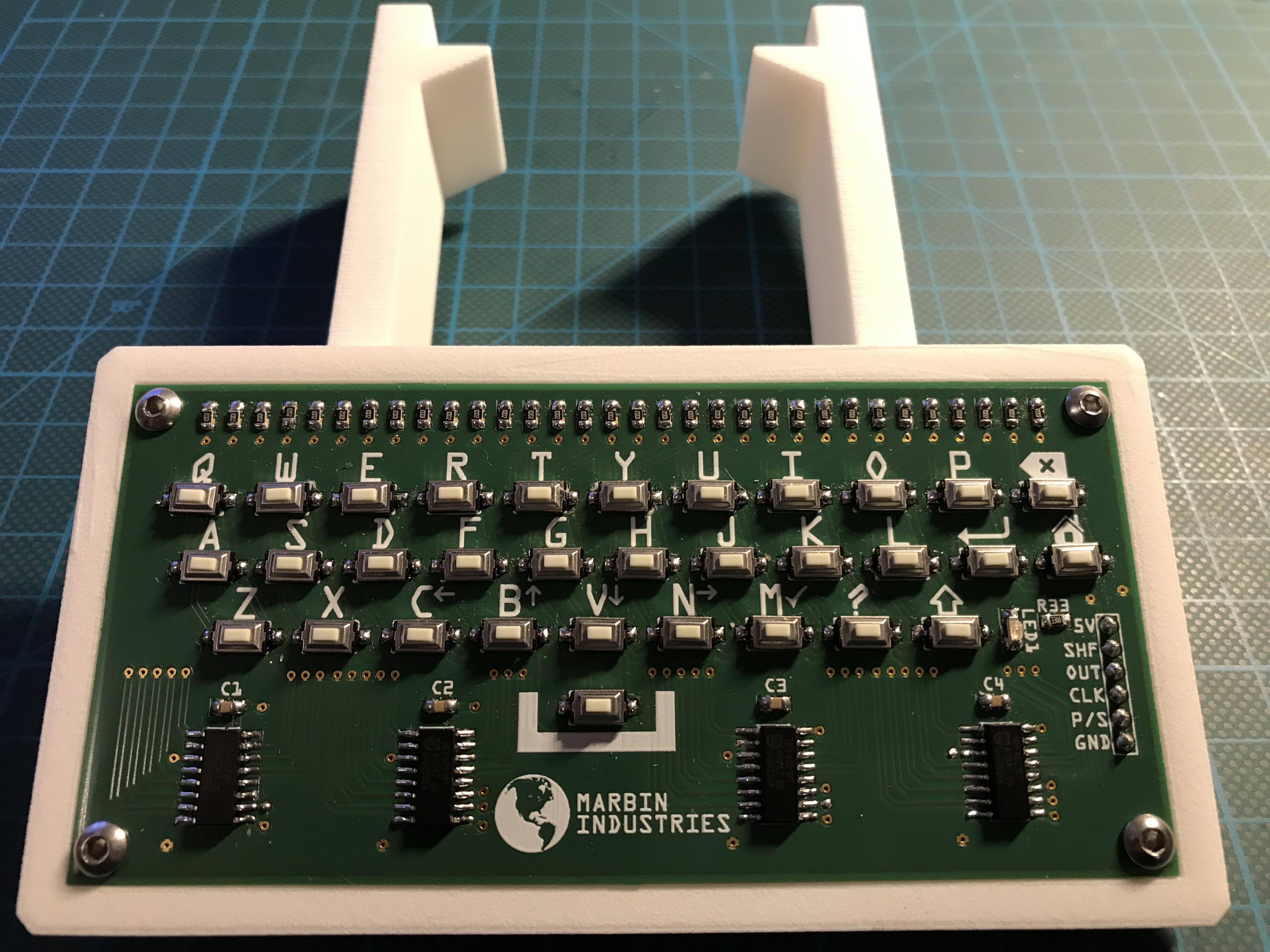
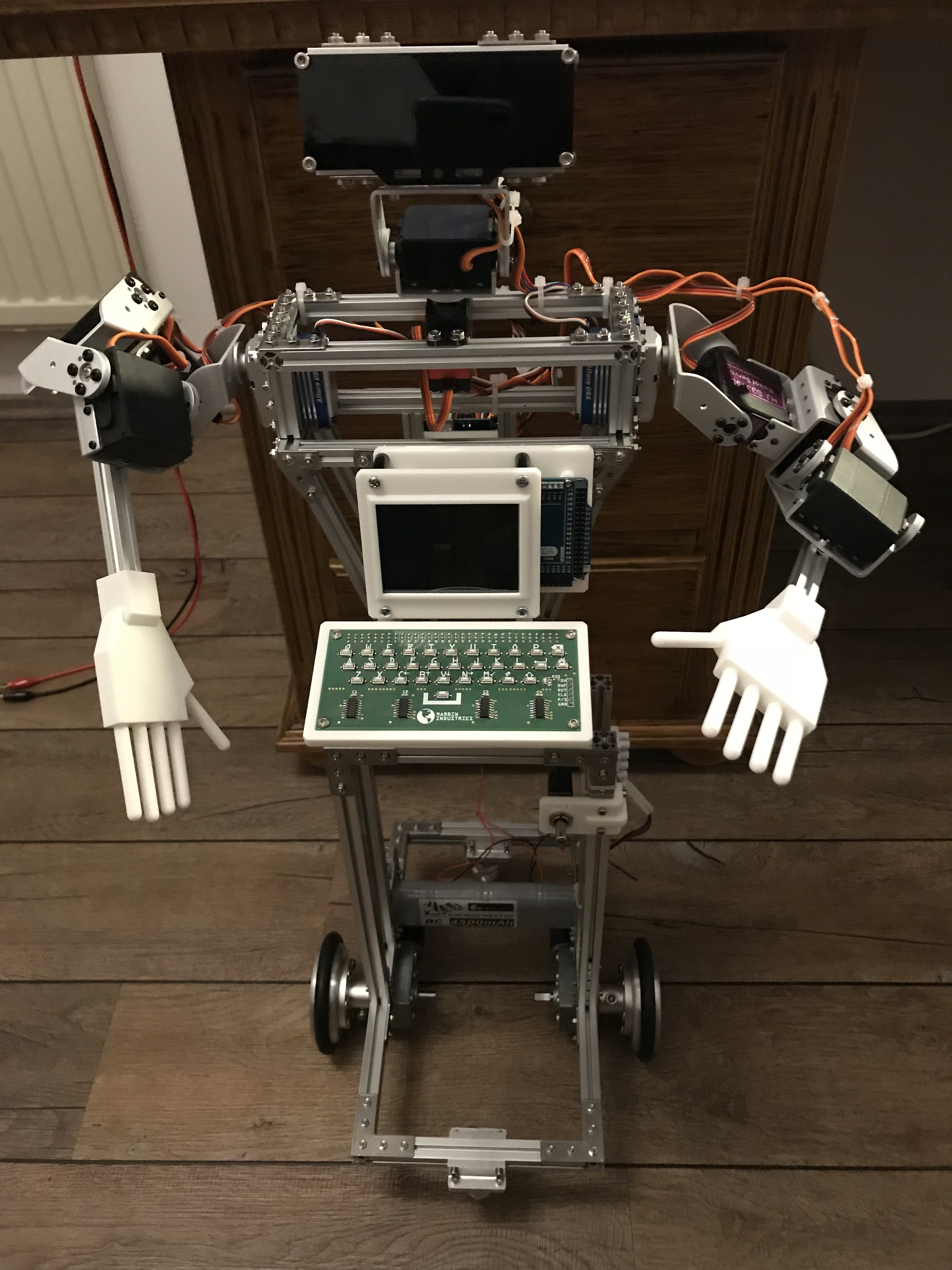
M. BindhammerMain human machine interface will be a DFrobot 2.8" TFT touch shield on an Arduino MEGA (which works fine on Arduino UNO and MEGA by setting the 3 tiny SMD switches on the backside of the PCB and using the SPI, Adafruit GFX and Adafruit ILI9341 libraries) and a custom designed shift registers based keyboard PCB, which I still need to populate and test: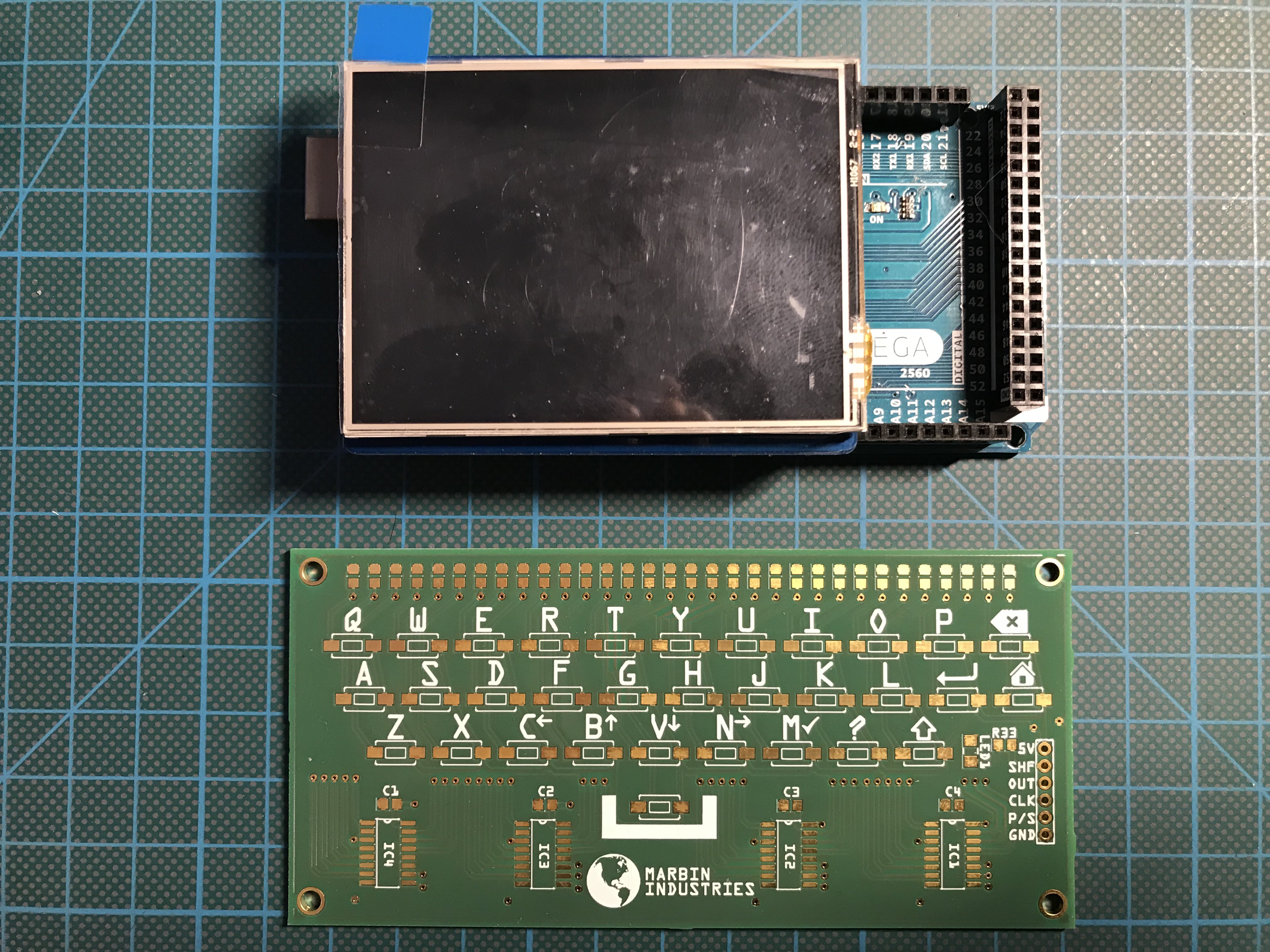 3 parts to 3-D print: the TFT and Arduino MEGA bracket, the keyboard bracket and the TFT cover.
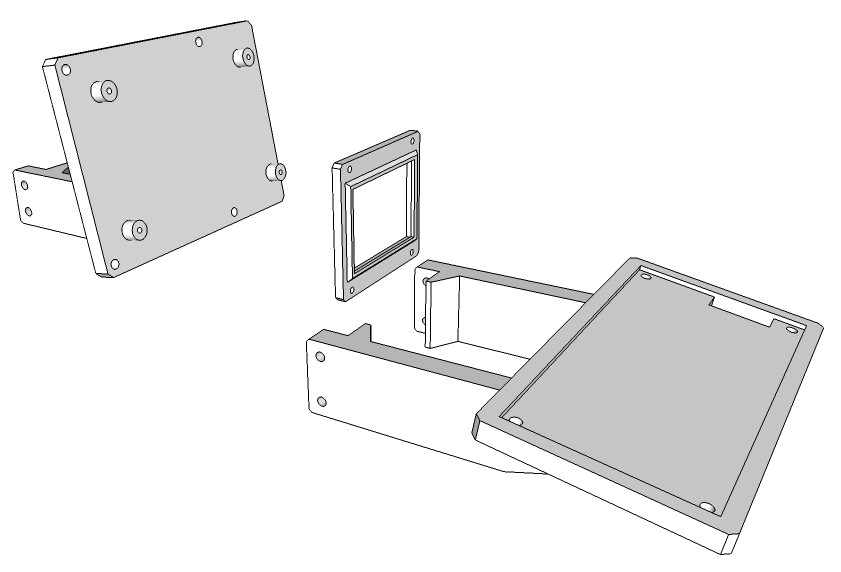
3 parts to 3-D print: the TFT and Arduino MEGA bracket, the keyboard bracket and the TFT cover.
Finally I populated the keyboard PCB and tested it:
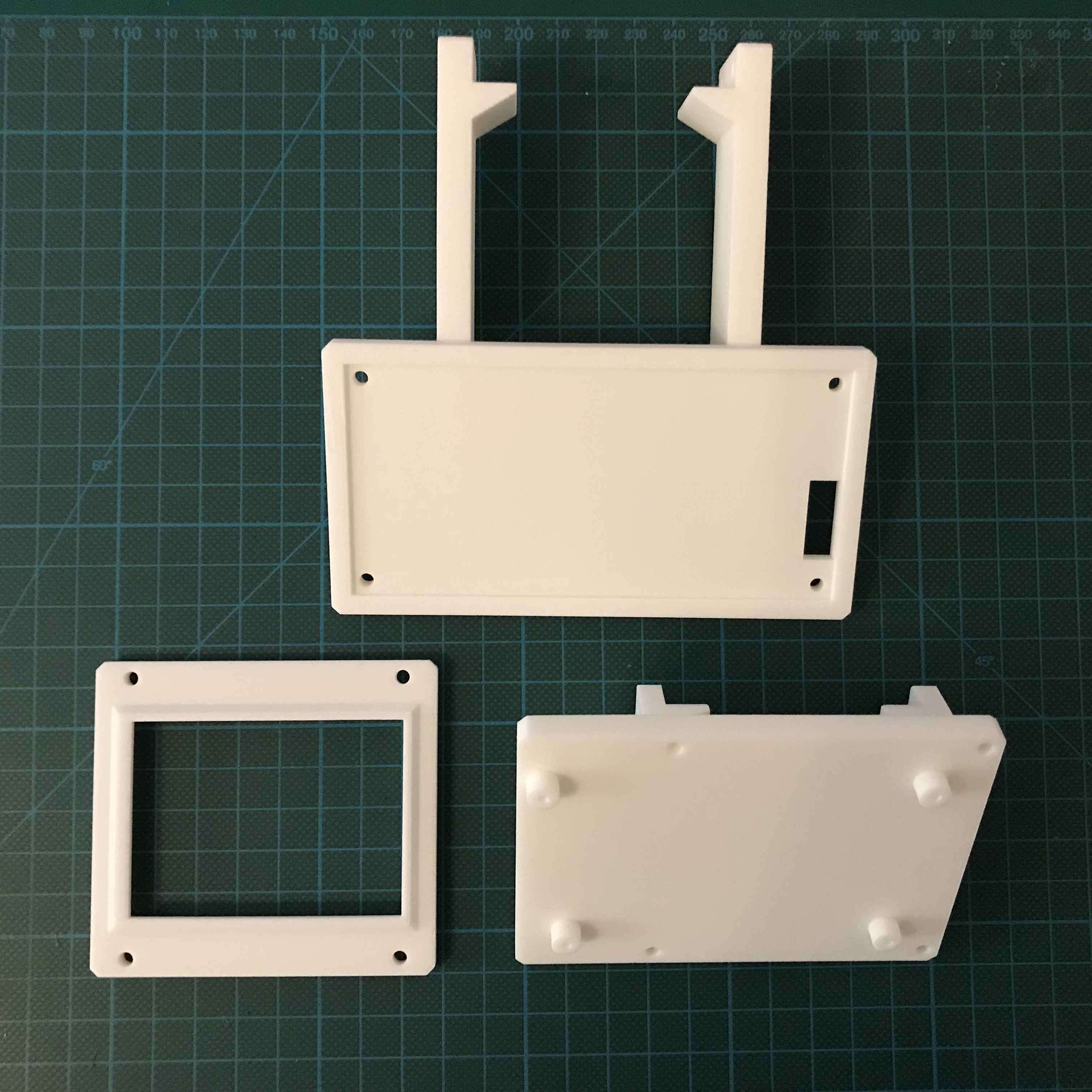
 Printed parts:
Printed parts:
 Touch screen module completed:
Touch screen module completed: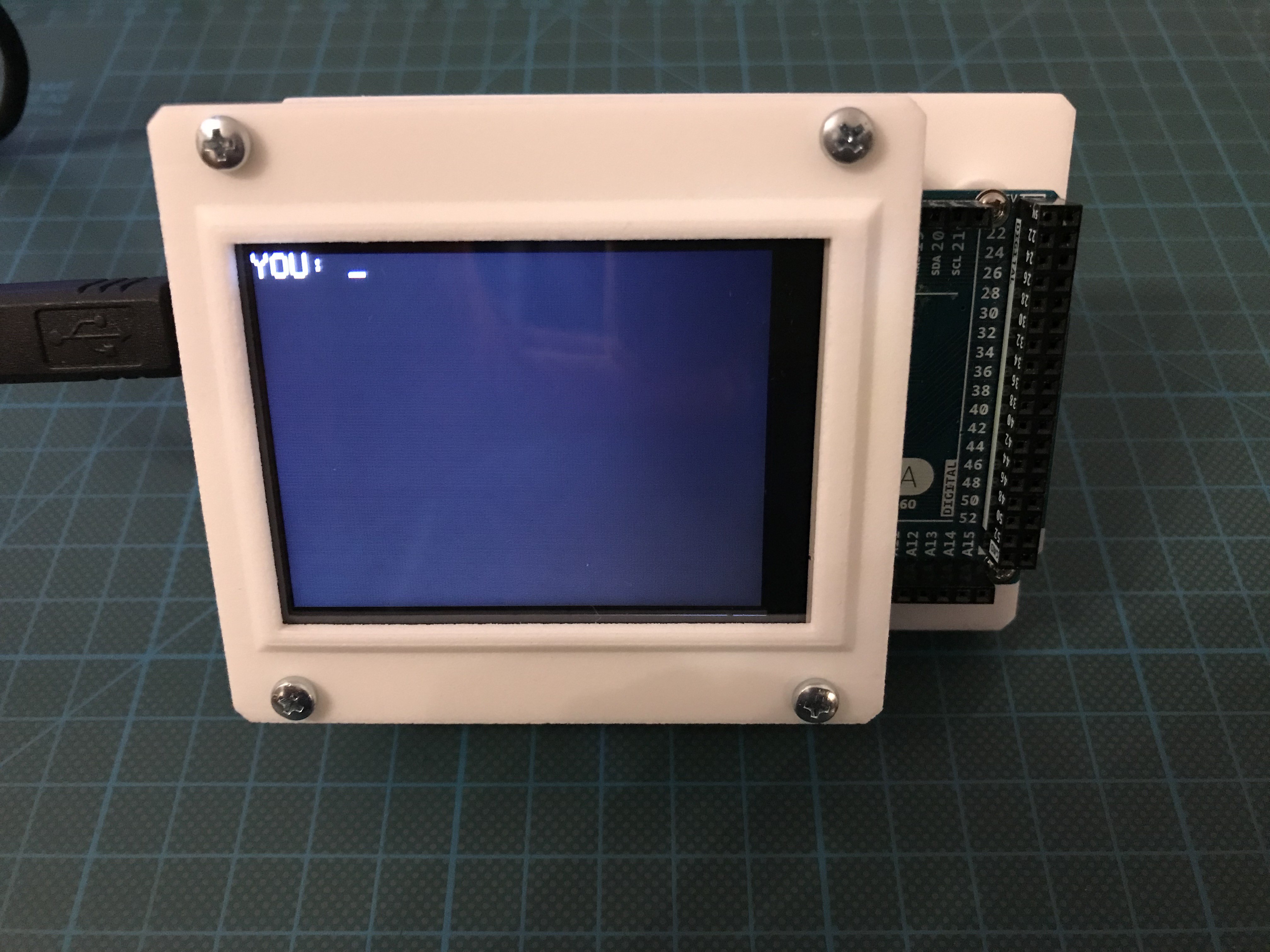
Keyboard module completed:
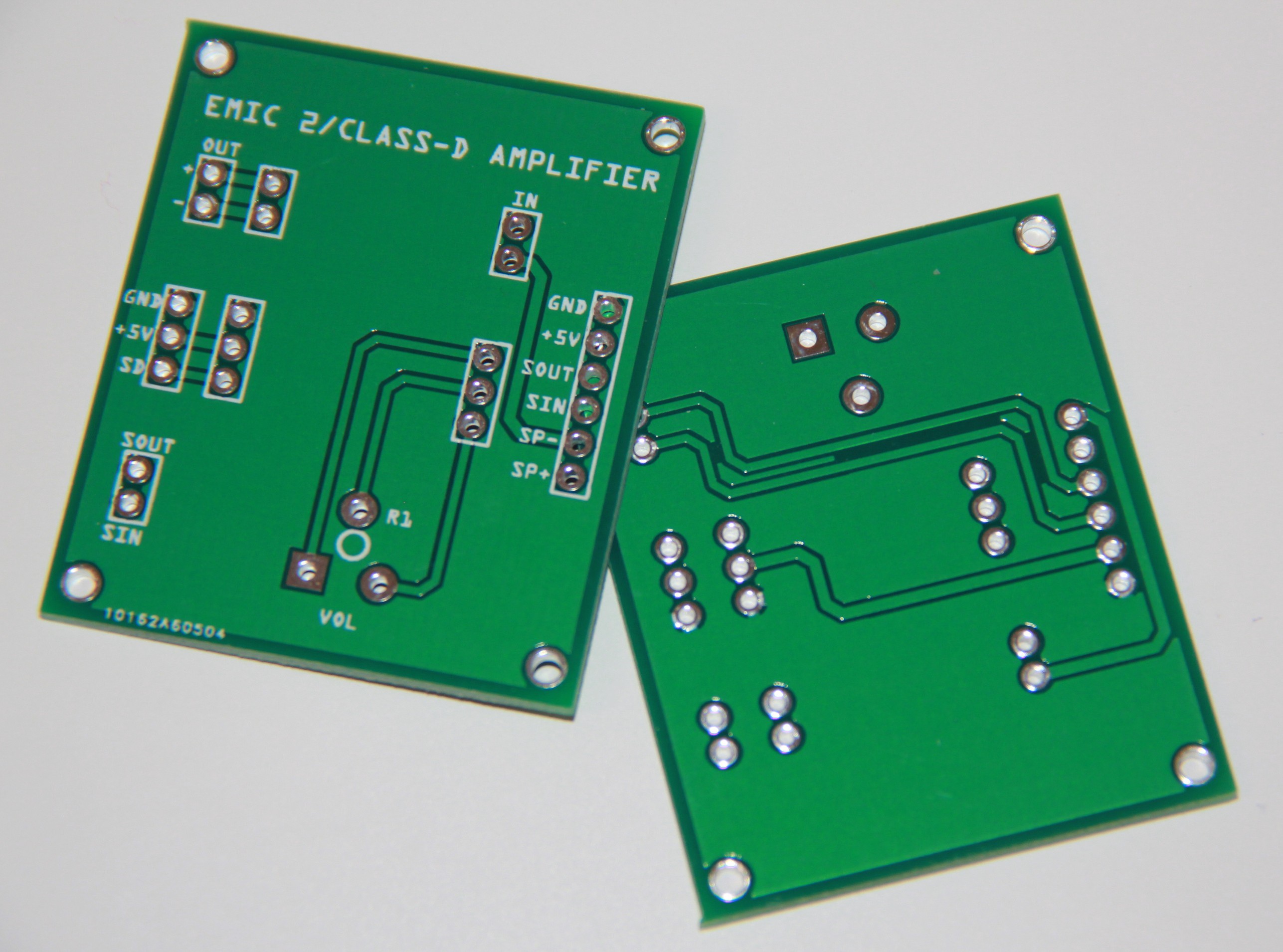
 Like for my previous robot project Murphy I am using a 2 W, 8 Ω miniature loudspeaker, an EMIC-2 text-to-speech module, a TPA2005D1 breakout board and a custom designed carrier board:
Like for my previous robot project Murphy I am using a 2 W, 8 Ω miniature loudspeaker, an EMIC-2 text-to-speech module, a TPA2005D1 breakout board and a custom designed carrier board:
 Populated :
Populated :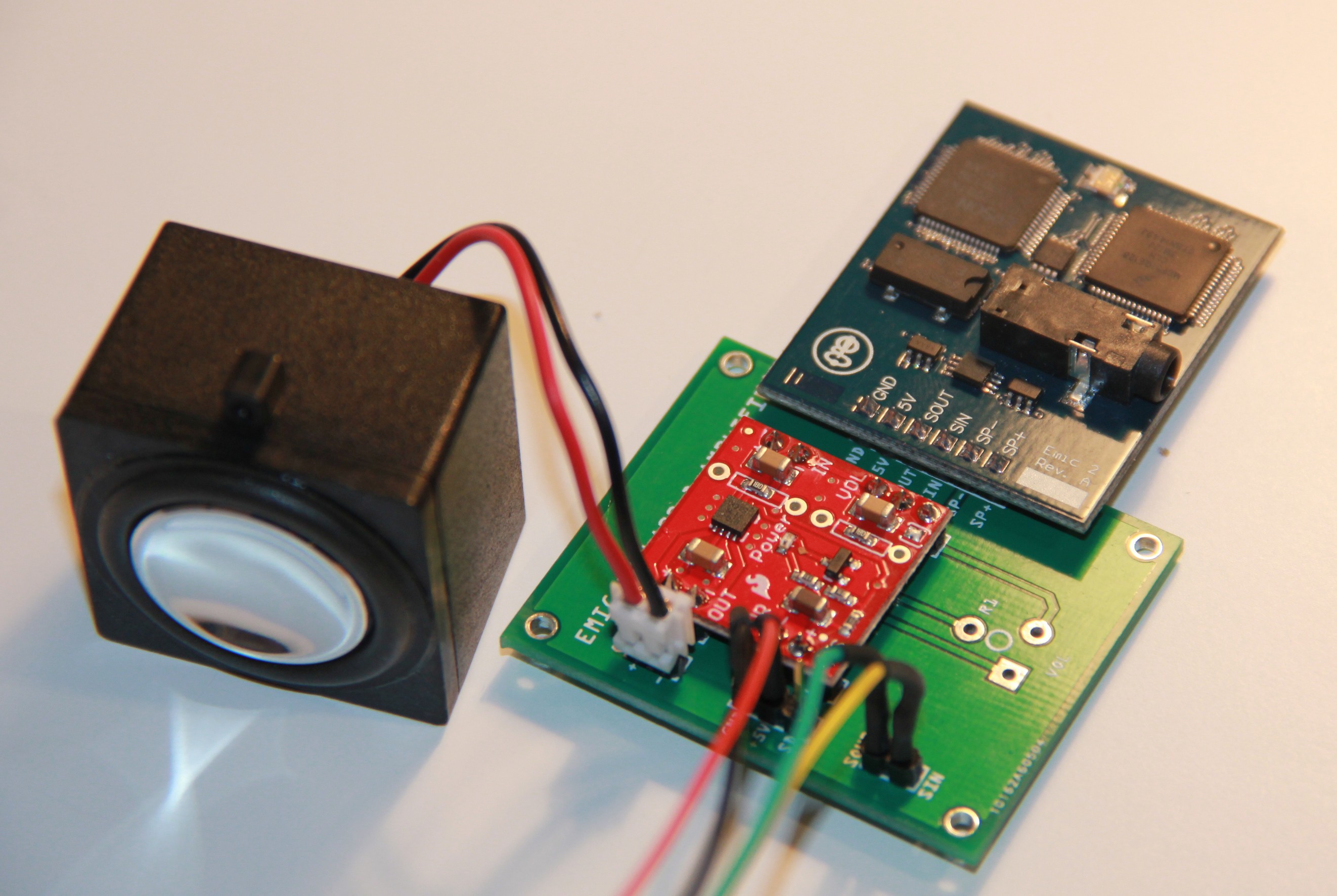
Wiring diagram:
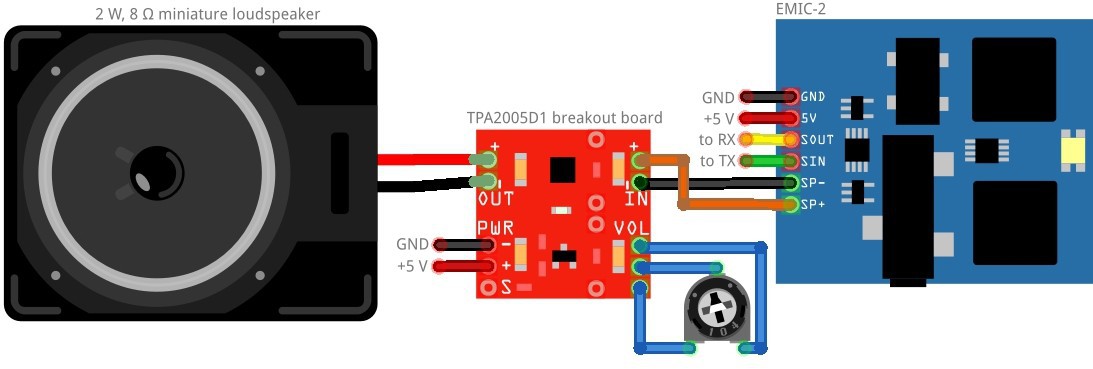
Important notes: The EMIC-2 does not work properly with Arduino hardware serial. Use the SoftwareSerial Library instead. The potentiometer is not really necessary as the volume can be adjusted by software.
Speech module design:
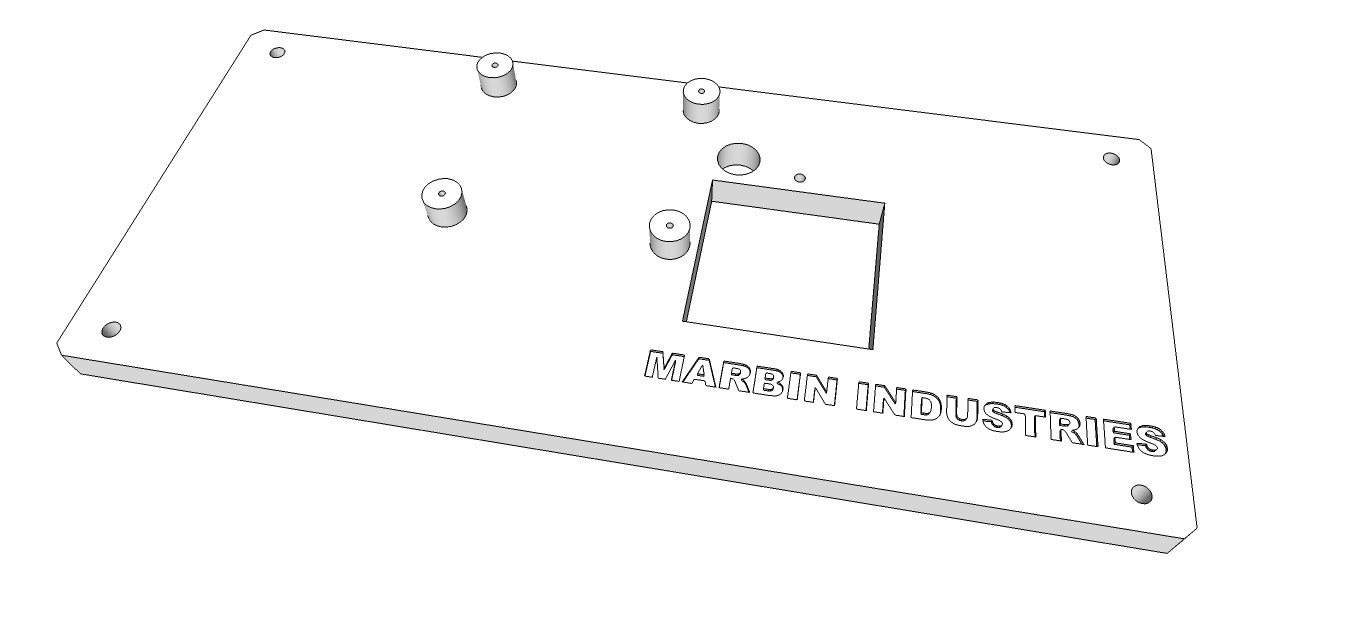
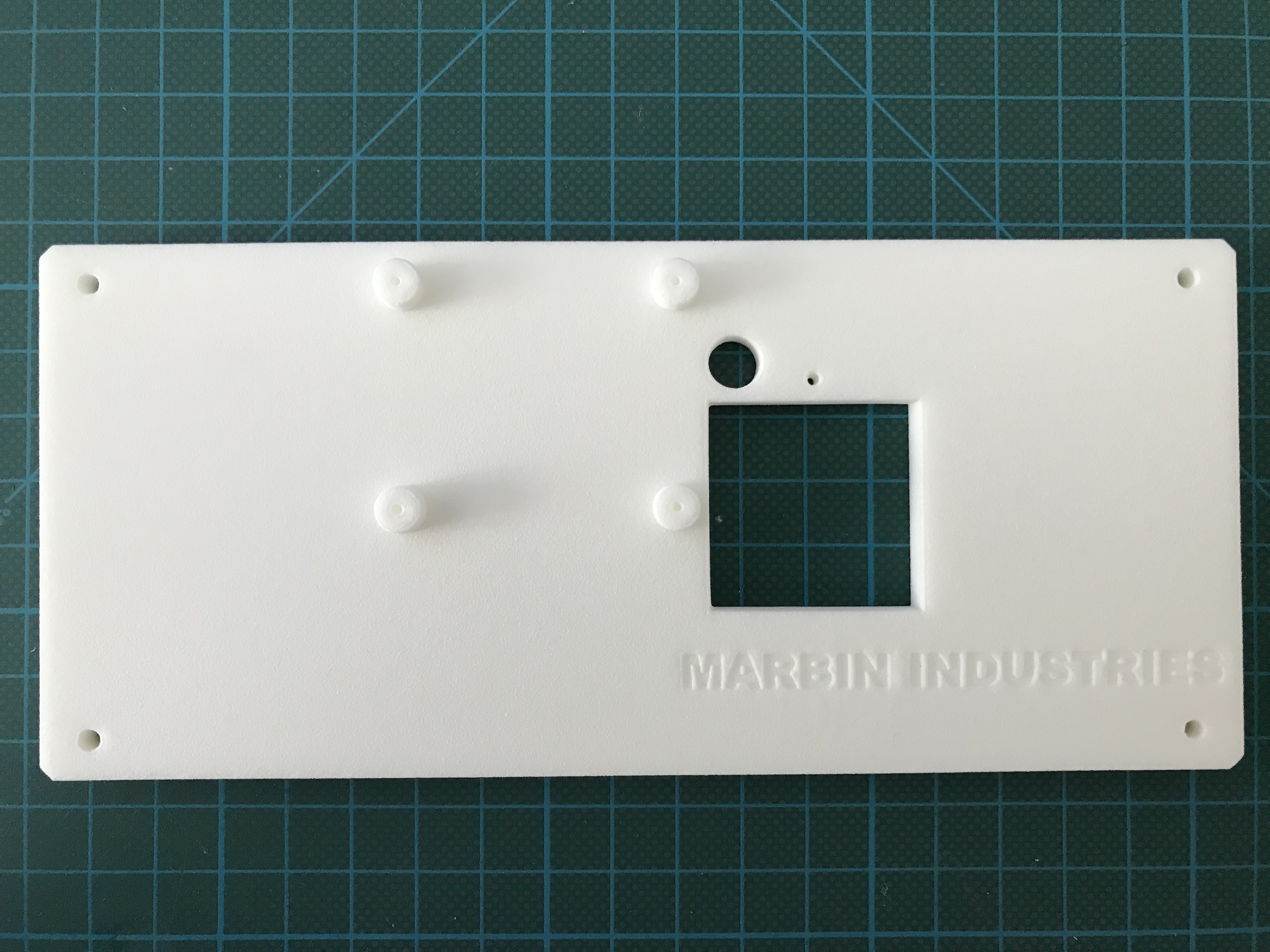
Again, Shapeways has done a great job printing this part:
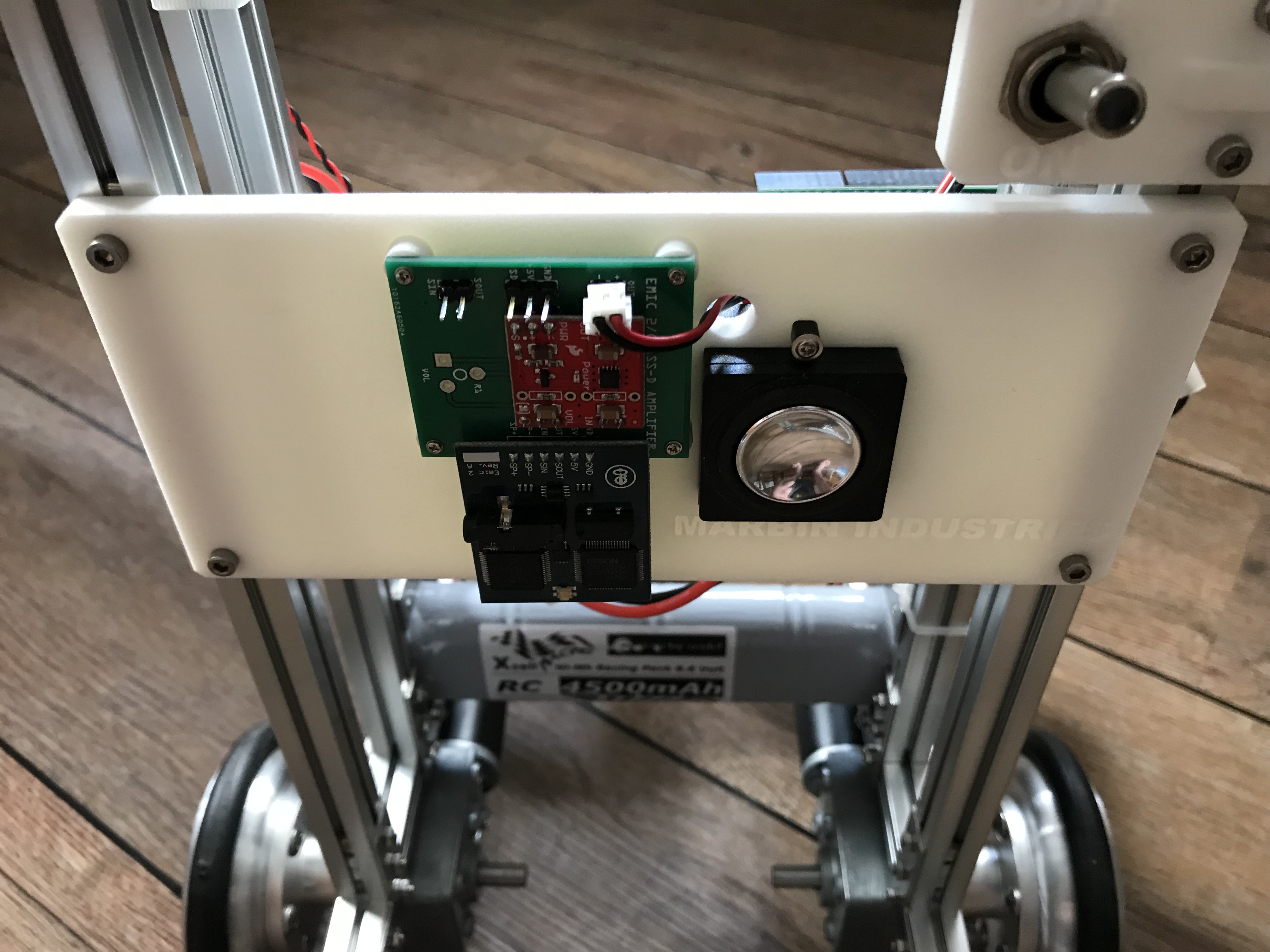
EMIC-2, TPA2005D1 breakout board and loudspeaker assembled and attached to the robot:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.