 M. Bindhammer
M. BindhammerIn this log I will discuss some algorithm ideas I have in mind for MARB. Some are easy, some require higher math.
1. Weather forecast
MARB will not be connected to the internet. Call me old-fashioned, but it has nothing to do with AI to get for instance the weather forecast from some online services like weather.com. So how can MARB forecast the weather?
In the old time we used analog barometers like the following:
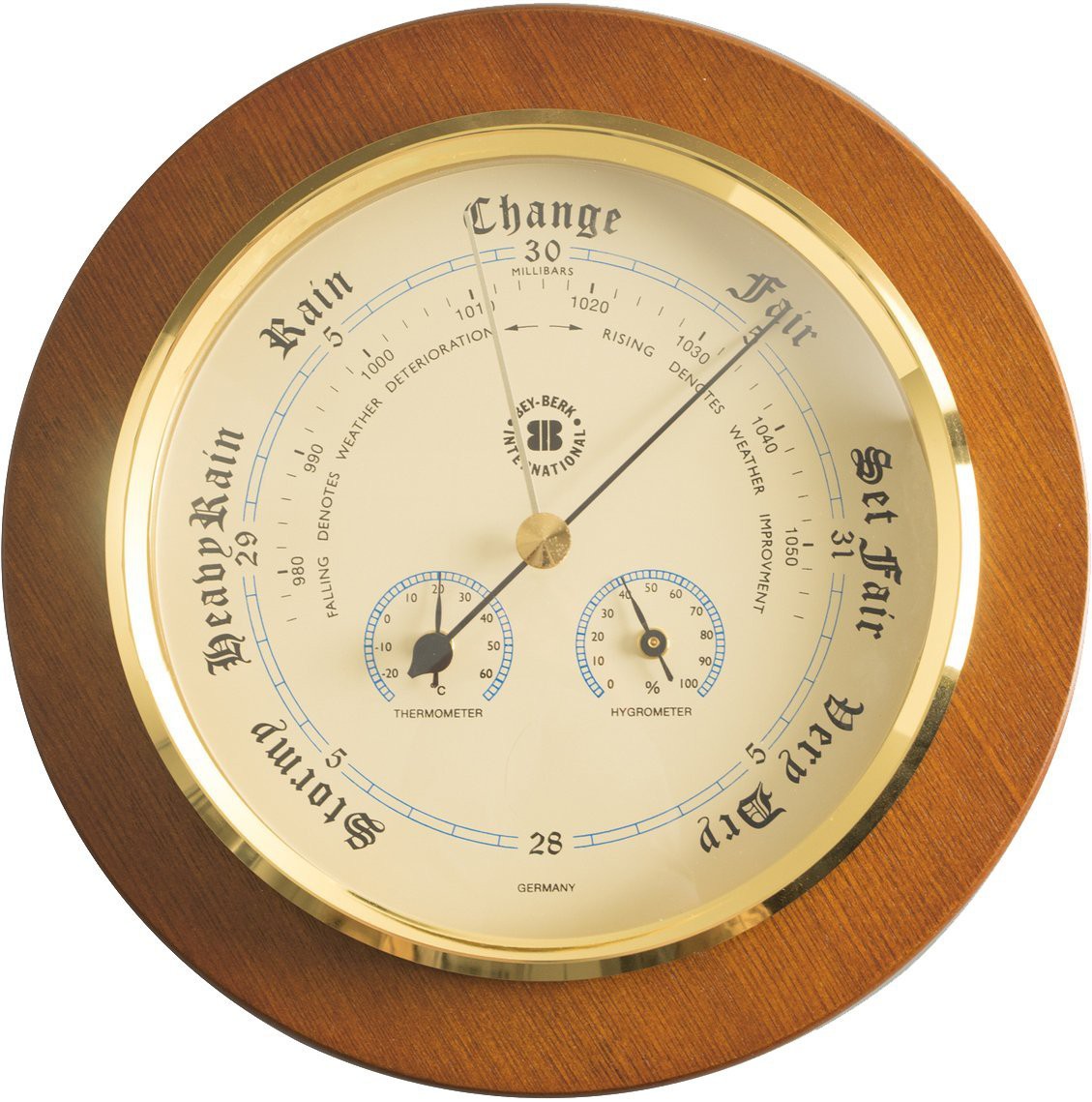
With a digital barometer like the BMP180 and a few if-statements we can predict the current weather. By storing the previous measured atmospheric pressure and compare it with the current one, we can also predict if the weather is improving or deteriorating. To forecast the weather of the next couple of days, we can use so called Markov chains. The probabilities of weather conditions (rainy or sunny), given the weather on the preceding day, are represented by the transition matrix:
The matrix P represents the weather model in which the probability that a sunny day followed by another sunny day is 0.9, and a rainy day followed by another rainy day is 0.5. Markov chains are usually memory-less. That means, the next state depends only on the current state and not on the sequence of events that preceded it. But we can change the initial state if we have other experiences to model the weather or something else. One more note: Columns must sum to 1 because it's a stochastic matrix.
The weather on the current day 0 is either sunny or rainy. This is represented by the following vectors (100% sunny weather and 0% rainy weather or 0% sunny weather and 100% rainy weather):The general rule for day n is now:
or equally
This leaves us with the question how to compute these matrices multiplications for our example:
Let us assume the weather on day 0 is sunny, then weather on day 1 can be predicted by:
Hence, the probability that the day 1 will be sunny is 0.9.
Applying the general rule again, weather on day 2 can be predicted by:
2. Intelligent obstacle avoidance
Today I spend the half day writing basic code for an obstacle avoidance algorithm, mainly a function to store all the distances of the ultrasonic sensors in an array and functions to represent all possible movements of the robot in the plain, taking PWM (maybe based on temperature, means entropy, or remaining battery power) and other things into account. Now I have to think about how MARB could avoid obstacles in an intelligent way. I have some ideas, let's see, how it goes...
Let every sensor Si of the sensor array representing a bit of a 7-bit binary number S0, S1, S2, S3, S4, S5, S6. Let Si = 1 if the sensor detects an obstacle and else 0.
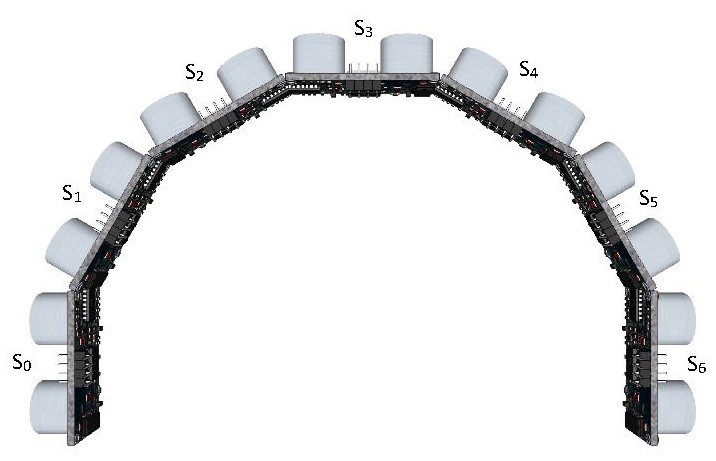
Now we can build a decision tree of an obstacle avoidance strategy and asign a movement behavior of the robot to every of the 128 possible permutations, binary 0000000 to 1111111 or decimal 0 to 127. Further reading of a similar idea: Obstacle avoidance design for a humanoid intelligent robot with ultrasonic sensors.
First code snippet, which converts all obstacle occurrence possibilities into a decimal number between 0 and 127. I am sure, this could be coded much more elegant, but for now I want to focus on the functionality, on the beauty I will work later...
const int trigPin_0 = 22; // sensor 90 degrees left
const int echoPin_0 = 23;
const int trigPin_1 = 24; // sensor 30 degrees left
const int echoPin_1 = 25;
const int trigPin_2 = 26; // sensor 60 degrees left
const int echoPin_2 = 27;
const int trigPin_3 = 28; // sensor 0 degrees
const int echoPin_3 = 29;
const int trigPin_4 = 30; // sensor 30 degrees right
const int echoPin_4 = 31;
const int trigPin_5 = 32; // sensor 60 degrees right
const int echoPin_5 = 33;
const int trigPin_6 = 34; // sensor 90 degrees right
const int echoPin_6 = 35;
long duration; // used to calculate distance
bool distances[7]; // stores the binary values in an array
bool boolDis; // 1 if obstacle within min_distance of sensor, else 0
const int min_distance = 20; // minimum distance range threshold
int obstacle_identifier; // stores an unique number between 0 and 127
void setup() {
US_setup ();
Serial.begin(9600);
}
void loop() {
get_distances ();
// print out array
for(int i = 0; i < 7; i ++) {
Serial.print(distances[i]);
}
Serial.println();
Serial.println(obstacle_identifier);
Serial.println();
Serial.println();
delay(200);
}
// ********************* FUNCTIONS *********************
// ultrasonic sensor setup
void US_setup () {
pinMode(trigPin_0, OUTPUT);
pinMode(echoPin_0, INPUT);
pinMode(trigPin_1, OUTPUT);
pinMode(echoPin_1, INPUT);
pinMode(trigPin_2, OUTPUT);
pinMode(echoPin_2, INPUT);
pinMode(trigPin_3, OUTPUT);
pinMode(echoPin_3, INPUT);
pinMode(trigPin_4, OUTPUT);
pinMode(echoPin_4, INPUT);
pinMode(trigPin_5, OUTPUT);
pinMode(echoPin_5, INPUT);
pinMode(trigPin_6, OUTPUT);
pinMode(echoPin_6, INPUT);
}
// boolean array to int converter
int boolean_to_decimal(bool bol[]) {
int sum = 0;
for (int i = 0; i < 7; i++) {
sum += bol[i] * (1 << (6 - i));
}
return sum;
}
// get the 7 distances converted to binary values and stored in an array
// convert the 7 bit binary number then into a decimal number
void get_distances () {
for (int i = 0; i < 7; i ++) {
switch (i) {
case 0:
digitalWrite(trigPin_0, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_0, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_0, LOW);
duration = pulseIn(echoPin_0, HIGH);
break;
case 1:
digitalWrite(trigPin_1, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_1, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_1, LOW);
duration = pulseIn(echoPin_1, HIGH);
break;
case 2:
digitalWrite(trigPin_2, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_2, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_2, LOW);
duration = pulseIn(echoPin_2, HIGH);
break;
case 3:
digitalWrite(trigPin_3, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_3, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_3, LOW);
duration = pulseIn(echoPin_3, HIGH);
break;
case 4:
digitalWrite(trigPin_4, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_4, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_4, LOW);
duration = pulseIn(echoPin_4, HIGH);
break;
case 5:
digitalWrite(trigPin_5, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_5, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_5, LOW);
duration = pulseIn(echoPin_5, HIGH);
break;
case 6:
digitalWrite(trigPin_6, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_6, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_6, LOW);
duration = pulseIn(echoPin_6, HIGH);
break;
}
if((duration * 0.017) >= min_distance) boolDis = 0; // no danger, obstacle is too far
else boolDis = 1; // danger, obstacle is close
distances[i] = boolDis; // store the binary value of each sensor into the bool array
}
obstacle_identifier = boolean_to_decimal(distances);
}
Today I had an interesting idea. The robot could count the number of turns in a certain time interval and try to improve it to a minimum by changing the min_distance value by itself to find a minimum. I need to work out an according mathematical function and differentiate it to see if this function has a local or global minimum.
Complete code for a first experiment below. So far I am quite satisfied with the results, see Videos! I still have the possibility to use the current measurements of each motor, compass as well as some advanced mathematical optimization theory.
const int trigPin_0 = 22; // sensor 90 degrees left
const int echoPin_0 = 23;
const int trigPin_1 = 24; // sensor 30 degrees left
const int echoPin_1 = 25;
const int trigPin_2 = 26; // sensor 60 degrees left
const int echoPin_2 = 27;
const int trigPin_3 = 28; // sensor 0 degrees
const int echoPin_3 = 29;
const int trigPin_4 = 30; // sensor 30 degrees right
const int echoPin_4 = 31;
const int trigPin_5 = 32; // sensor 60 degrees right
const int echoPin_5 = 33;
const int trigPin_6 = 34; // sensor 90 degrees right
const int echoPin_6 = 35;
long duration; // used to calculate distance
bool distances[7]; // stores the binary values in an array
bool boolDis; // 1 if obstacle within min_distance of sensor, else 0
const int min_distance = 20; // minimum distance range threshold
int obstacle_identifier; // stores an unique number between 0 and 127
#include "DualVNH5019MotorShield.h"
DualVNH5019MotorShield md;
int turn_delay_left = 500; // turn left duration
int turn_delay_right = 500; // turn right duration
int move_delay_backward = 500; // turn right duration
int motor_acc = 2; // motor acceleration
int PWM_value = 300;
void setup() {
US_setup ();
md.init();
randomSeed(analogRead(15));
Serial.begin(9600);
}
void loop() {
get_distances ();
if(obstacle_identifier == 0 || obstacle_identifier == 1 || obstacle_identifier == 65) {
robot_forward ();
}
if(obstacle_identifier == 2) {
robot_forward_stop ();
robot_turn_left ();
}
if(obstacle_identifier == 32 || obstacle_identifier == 48 || obstacle_identifier == 64
|| obstacle_identifier == 66) {
robot_forward_stop ();
robot_turn_right ();
}
if(obstacle_identifier == 3 || obstacle_identifier == 4 || obstacle_identifier == 5
|| obstacle_identifier == 6 || obstacle_identifier == 7 || obstacle_identifier == 9
|| obstacle_identifier == 10 || obstacle_identifier == 11 || obstacle_identifier == 12
|| obstacle_identifier == 13 || obstacle_identifier == 14 || obstacle_identifier == 15
|| obstacle_identifier == 17 || obstacle_identifier == 18 || obstacle_identifier == 19
|| obstacle_identifier == 20 || obstacle_identifier == 21 || obstacle_identifier == 22
|| obstacle_identifier == 23 || obstacle_identifier == 25 || obstacle_identifier == 26
|| obstacle_identifier == 27 || obstacle_identifier == 29 || obstacle_identifier == 30
|| obstacle_identifier == 31 || obstacle_identifier == 35 || obstacle_identifier == 36
|| obstacle_identifier == 37 || obstacle_identifier == 38 || obstacle_identifier == 39
|| obstacle_identifier == 42 || obstacle_identifier == 45 || obstacle_identifier == 46
|| obstacle_identifier == 47 || obstacle_identifier == 51 || obstacle_identifier == 53
|| obstacle_identifier == 55 || obstacle_identifier == 61 || obstacle_identifier == 63
|| obstacle_identifier == 67 || obstacle_identifier == 69 || obstacle_identifier == 70
|| obstacle_identifier == 71 || obstacle_identifier == 74|| obstacle_identifier == 75
|| obstacle_identifier == 77 || obstacle_identifier == 78 || obstacle_identifier == 79
|| obstacle_identifier == 83 || obstacle_identifier == 87 || obstacle_identifier == 91
|| obstacle_identifier == 95 || obstacle_identifier == 103 || obstacle_identifier == 111) {
robot_forward_stop ();
robot_backward ();
robot_turn_left ();
}
if(obstacle_identifier == 16 || obstacle_identifier == 24 || obstacle_identifier == 33
|| obstacle_identifier == 40 || obstacle_identifier == 41 || obstacle_identifier == 42
|| obstacle_identifier == 44 || obstacle_identifier == 49|| obstacle_identifier == 50
|| obstacle_identifier == 52 || obstacle_identifier == 56 || obstacle_identifier == 57
|| obstacle_identifier == 58 || obstacle_identifier == 59 || obstacle_identifier == 60
|| obstacle_identifier == 68 || obstacle_identifier == 72 || obstacle_identifier == 76
|| obstacle_identifier == 80 || obstacle_identifier == 81 || obstacle_identifier == 82
|| obstacle_identifier == 84 || obstacle_identifier == 86 || obstacle_identifier == 88
|| obstacle_identifier == 89 || obstacle_identifier == 90 || obstacle_identifier == 92
|| obstacle_identifier == 94 || obstacle_identifier == 96 || obstacle_identifier == 97
|| obstacle_identifier == 98 || obstacle_identifier == 100 || obstacle_identifier == 101
|| obstacle_identifier == 102 || obstacle_identifier == 104 || obstacle_identifier == 105
|| obstacle_identifier == 106 || obstacle_identifier == 108 || obstacle_identifier == 109
|| obstacle_identifier == 110 || obstacle_identifier == 112 || obstacle_identifier == 113
|| obstacle_identifier == 114 || obstacle_identifier == 115 || obstacle_identifier == 116
|| obstacle_identifier == 117 || obstacle_identifier == 118 || obstacle_identifier == 120
|| obstacle_identifier == 121 || obstacle_identifier == 122 || obstacle_identifier == 123
|| obstacle_identifier == 124 || obstacle_identifier == 125 || obstacle_identifier == 126) {
robot_forward_stop ();
robot_backward ();
robot_turn_right ();
}
if(obstacle_identifier == 8 || obstacle_identifier == 28 || obstacle_identifier == 34
|| obstacle_identifier == 54 || obstacle_identifier == 62 || obstacle_identifier == 73
|| obstacle_identifier == 85 || obstacle_identifier == 93 || obstacle_identifier == 99
|| obstacle_identifier == 107 || obstacle_identifier == 119|| obstacle_identifier == 127) {
robot_forward_stop ();
robot_backward ();
robot_turn_randomly ();
}
}
// ********************* FUNCTIONS *********************
// ultrasonic sensor setup
void US_setup () {
pinMode(trigPin_0, OUTPUT);
pinMode(echoPin_0, INPUT);
pinMode(trigPin_1, OUTPUT);
pinMode(echoPin_1, INPUT);
pinMode(trigPin_2, OUTPUT);
pinMode(echoPin_2, INPUT);
pinMode(trigPin_3, OUTPUT);
pinMode(echoPin_3, INPUT);
pinMode(trigPin_4, OUTPUT);
pinMode(echoPin_4, INPUT);
pinMode(trigPin_5, OUTPUT);
pinMode(echoPin_5, INPUT);
pinMode(trigPin_6, OUTPUT);
pinMode(echoPin_6, INPUT);
}
// boolean array to int converter
int boolean_to_decimal(bool bol[]) {
int sum = 0;
for (int i = 0; i < 7; i++) {
sum += bol[i] * (1 << (6 - i));
}
return sum;
}
// get the 7 distances converted to binary values and stored in an array
// convert the 7 bit binary number then into a decimal number
void get_distances () {
for (int i = 0; i < 7; i ++) {
switch (i) {
case 0:
digitalWrite(trigPin_0, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_0, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_0, LOW);
duration = pulseIn(echoPin_0, HIGH);
break;
case 1:
digitalWrite(trigPin_1, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_1, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_1, LOW);
duration = pulseIn(echoPin_1, HIGH);
break;
case 2:
digitalWrite(trigPin_2, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_2, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_2, LOW);
duration = pulseIn(echoPin_2, HIGH);
break;
case 3:
digitalWrite(trigPin_3, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_3, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_3, LOW);
duration = pulseIn(echoPin_3, HIGH);
break;
case 4:
digitalWrite(trigPin_4, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_4, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_4, LOW);
duration = pulseIn(echoPin_4, HIGH);
break;
case 5:
digitalWrite(trigPin_5, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_5, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_5, LOW);
duration = pulseIn(echoPin_5, HIGH);
break;
case 6:
digitalWrite(trigPin_6, LOW);
delayMicroseconds(2);
digitalWrite(trigPin_6, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin_6, LOW);
duration = pulseIn(echoPin_6, HIGH);
break;
}
if((duration * 0.017) >= min_distance) boolDis = 0; // no danger, obstacle is too far
else boolDis = 1; // danger, obstacle is close
distances[i] = boolDis; // store the binary value of each sensor into the bool array
}
obstacle_identifier = boolean_to_decimal(distances);
}
// motor control
void robot_turn_left () {
int i = 0;
for(i = 0; i < PWM_value + 1; i ++) {
md.setM1Speed(i); // right motor forward
md.setM2Speed(i); // left motor backward
delay(motor_acc);
}
delay(turn_delay_left);
for(i = PWM_value; i < 1; i --) {
md.setM1Speed(i); // right motor forward
md.setM2Speed(i); // left motor backward
delay(motor_acc);
}
}
void robot_turn_right () {
int i = 0;
for(i = 0; i > -PWM_value - 1; i --) {
md.setM1Speed(i); // right motor backward
md.setM2Speed(i); // left motor forward
delay(motor_acc);
}
delay(turn_delay_right);
for(i = -PWM_value; i > -1; i ++) {
md.setM1Speed(i); // right motor backward
md.setM2Speed(i); // left motor forward
delay(motor_acc);
}
}
void robot_turn_randomly () {
int randNumber = random(499);
if(randNumber < 250) robot_turn_right ();
else robot_turn_left ();
}
void robot_forward () {
md.setM1Speed(PWM_value); // right motor forward
md.setM2Speed(-PWM_value); // left motor forward
}
void robot_backward_stop () {
for(int i = PWM_value; i > -1; i --) {
md.setM1Speed(-i); // right motor backward
md.setM2Speed(i); // left motor backward
delay(motor_acc);
}
}
void robot_backward () {
for(int i = 0; i < PWM_value + 1; i ++) {
md.setM1Speed(-i); // right motor backward
md.setM2Speed(i); // left motor backward
delay(motor_acc);
}
delay(move_delay_backward);
robot_backward_stop ();
}
void robot_forward_stop () {
for(int i = PWM_value; i > -1; i --) {
md.setM1Speed(i); // right motor forward
md.setM2Speed(-i); // left motor forward
delay(motor_acc);
}
}
3. Color sensing
The k-NN (k-nearest neighbors) algorithm is among the simplest of all machine learning algorithms. We will use this algorithm to classify the color of a new object. As our training set of learned colors will only contain one sample per color, k = 1, and the object is simply assigned to the class of that single nearest neighbor.
We will work in a n-dimensional Euclidean space. In general, for an n-dimensional Euclidean space the Euclidean distance between two points
and
is given by
I remember when my daughter was a toddler, it took her nearly one year until she could classify all basic colors. This is no easy task even for a human brain.
4 years back I developed an algorithm to classify colors based on the color sensor TCS3200. I adapted this code for the APDS-9960 RGB and gesture sensor. It still works quite well even the APDS-9960 has no collimator lens and LED's to illuminate the object and rules out the ambient light.
#include <SunFounder_Emo.h>
#include <emo_maps.h> // saved emotions
#include <Wire.h>
#include <SparkFun_APDS9960.h>
// global Variables
SparkFun_APDS9960 apds = SparkFun_APDS9960();
uint8_t proximity_data = 0;
uint16_t ambient_light = 0;
uint16_t red_light = 0;
uint16_t green_light = 0;
uint16_t blue_light = 0;
int PercentageRed, PercentageGreen, PercentageBlue;
// learned colors
// array = [row][column]
int learned_colors[3][6] = {
{44, 46, 48, 80, 36, 34}, // R
{41, 41, 43, 30, 49, 44}, // G
{39, 44, 41, 33, 57, 57} // B
};
char* color[] = {"white", "orange", "yellow", "red", "green", "blue"};
Emo my_emo(10); // CS pin
void setup() {
my_emo.show_emo(look5); // just show a face during color sensing
Serial.begin(9600);
apds.init();
// adjust the proximity sensor gain
apds.setProximityGain(PGAIN_2X);
// start running the APDS-9960 proximity sensor (no interrupts)
apds.enableProximitySensor(false);
// start running the APDS-9960 light sensor (no interrupts)
apds.enableLightSensor(false);
delay(500);
}
void loop() {
// read the proximity value and print
apds.readProximity(proximity_data);
if(proximity_data > 244) {
// get values from sensor
apds.readAmbientLight(ambient_light);
apds.readRedLight(red_light);
apds.readGreenLight(green_light);
apds.readBlueLight(blue_light);
PercentageRed = int((float(red_light) / float(ambient_light)) * 100.0);
PercentageGreen = int((float(green_light) / float(ambient_light)) * 100.0);
PercentageBlue = int((float(blue_light) / float(ambient_light)) * 100.0);
Serial.print("Red: ");
Serial.print(PercentageRed);
Serial.print(" Green: ");
Serial.print(PercentageGreen);
Serial.print(" Blue: ");
Serial.println(PercentageBlue);
classify_color();
}
delay(500);
}
void classify_color() {
int i_color;
int ClosestColor;
float MaxDiff;
float MinDiff = 100.0;
// find nearest neighbor, k = 1
for (i_color = 0; i_color < 6; i_color ++) {
// compute Euclidean distances
float ED = sqrt(pow((learned_colors[0][i_color] - PercentageRed),2.0) +
pow((learned_colors[1][i_color] - PercentageGreen),2.0) + pow((learned_colors[2][i_color] - PercentageBlue),2.0));
MaxDiff = ED;
// find minimum distance
if (MaxDiff < MinDiff) {
MinDiff = MaxDiff;
ClosestColor = i_color;
}
}
Serial.print("Object is "); // print result
Serial.println(color[ClosestColor]);
Serial.println();
}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thanks, dude!
Are you sure? yes | no
Nice, very nice :-D I didnt quite 'get' MARB first-off, but I see now what you're aiming for, he's a really smart robot. :-)
Thats some nice modelling.
Are you sure? yes | no