 Paul Gould
Paul GouldTail Design
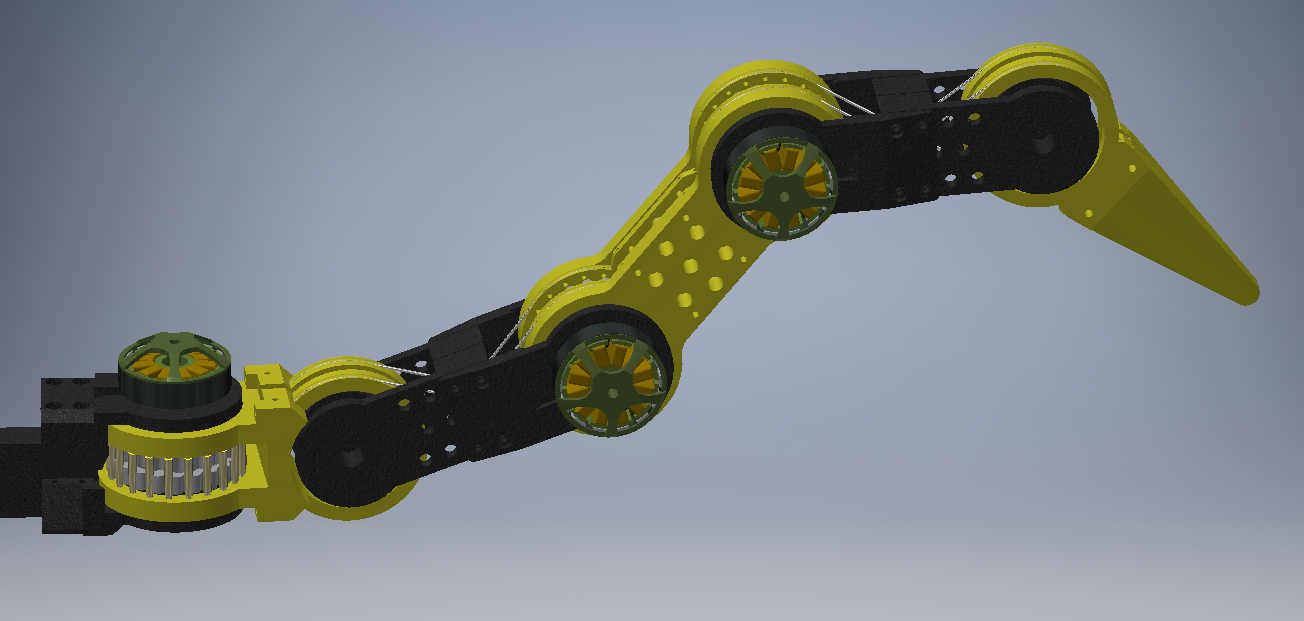
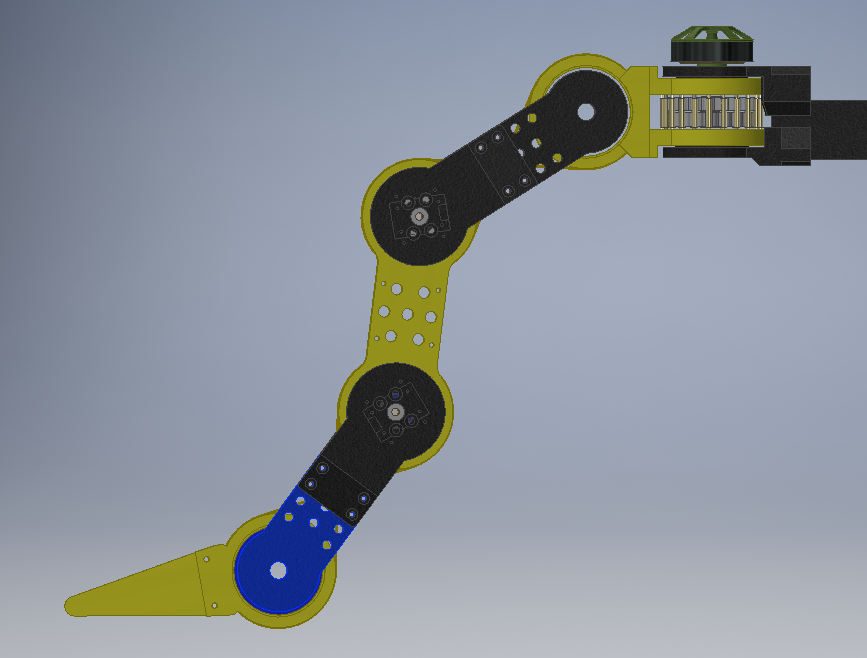
3x Mini Actuators (5 Joints)
Joint 1 is tail "wag"
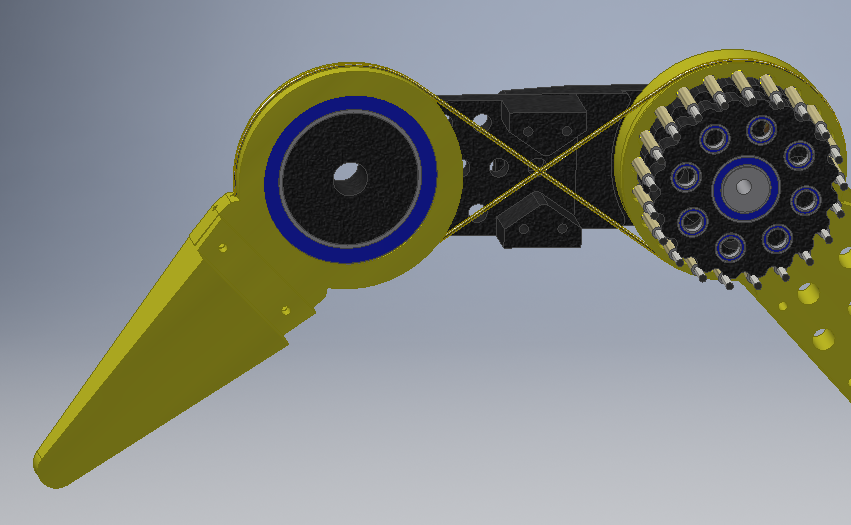
Joint 2 has figure 8 pulley to Joint 3 and the angle is opposite
Joint 3 is actuated up/down
Joint 4 is actuated up/down
Joint 5 has a figure 8 pulley to Joint 4 and the angle is opposite
Distance between Joints is 100mm
Motors are Multistar Elite 3508
The tail is used for the quadruped's balance.
Was thinking about putting an end effector, camera or gripper
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.