 Carl Bugeja
Carl BugejaInspired from my pcb motor project (https://hackaday.io/project/39494-pcb-motor), this project is aimed to make a very thin low-torque linear pcb actuator.
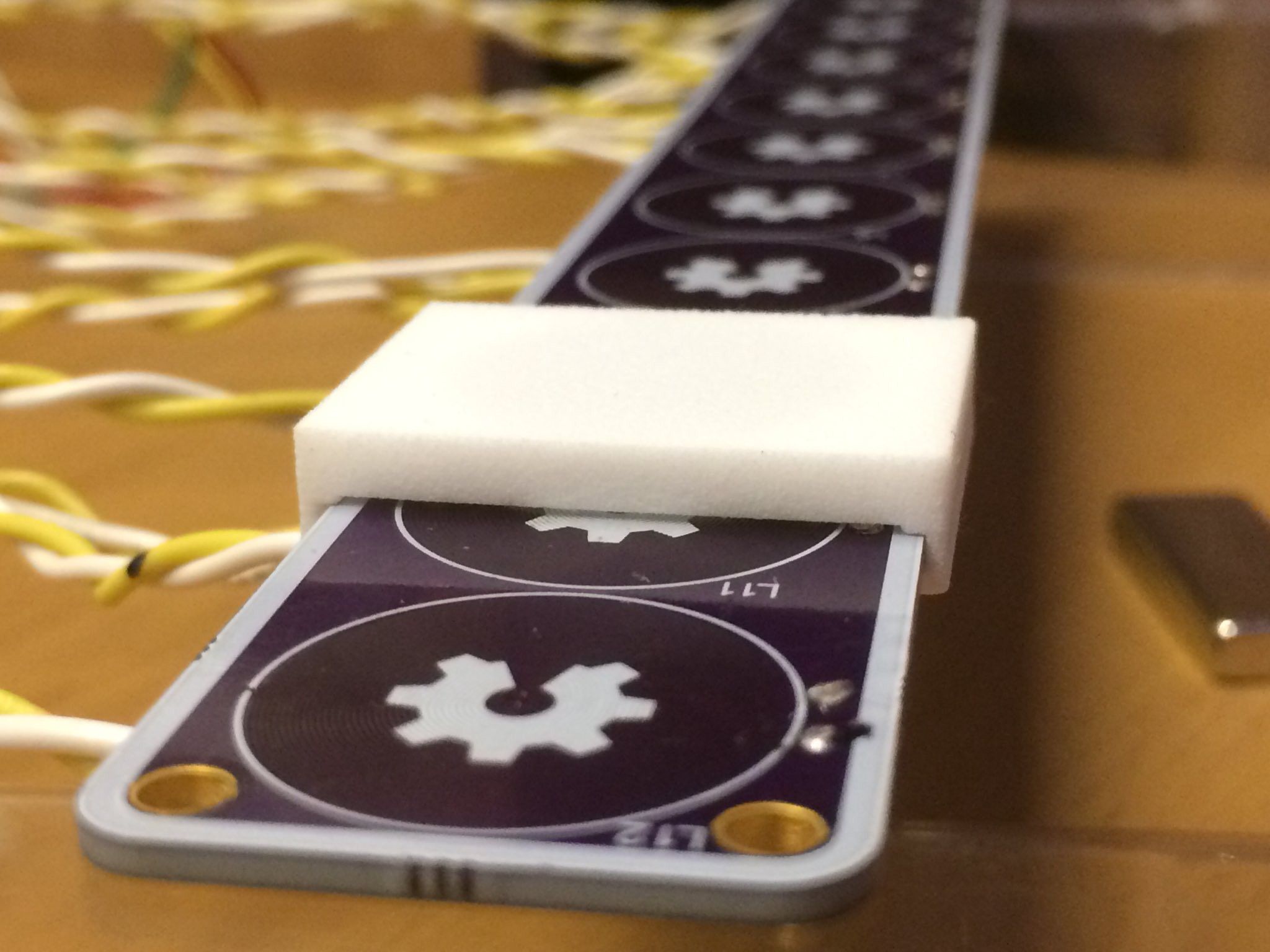
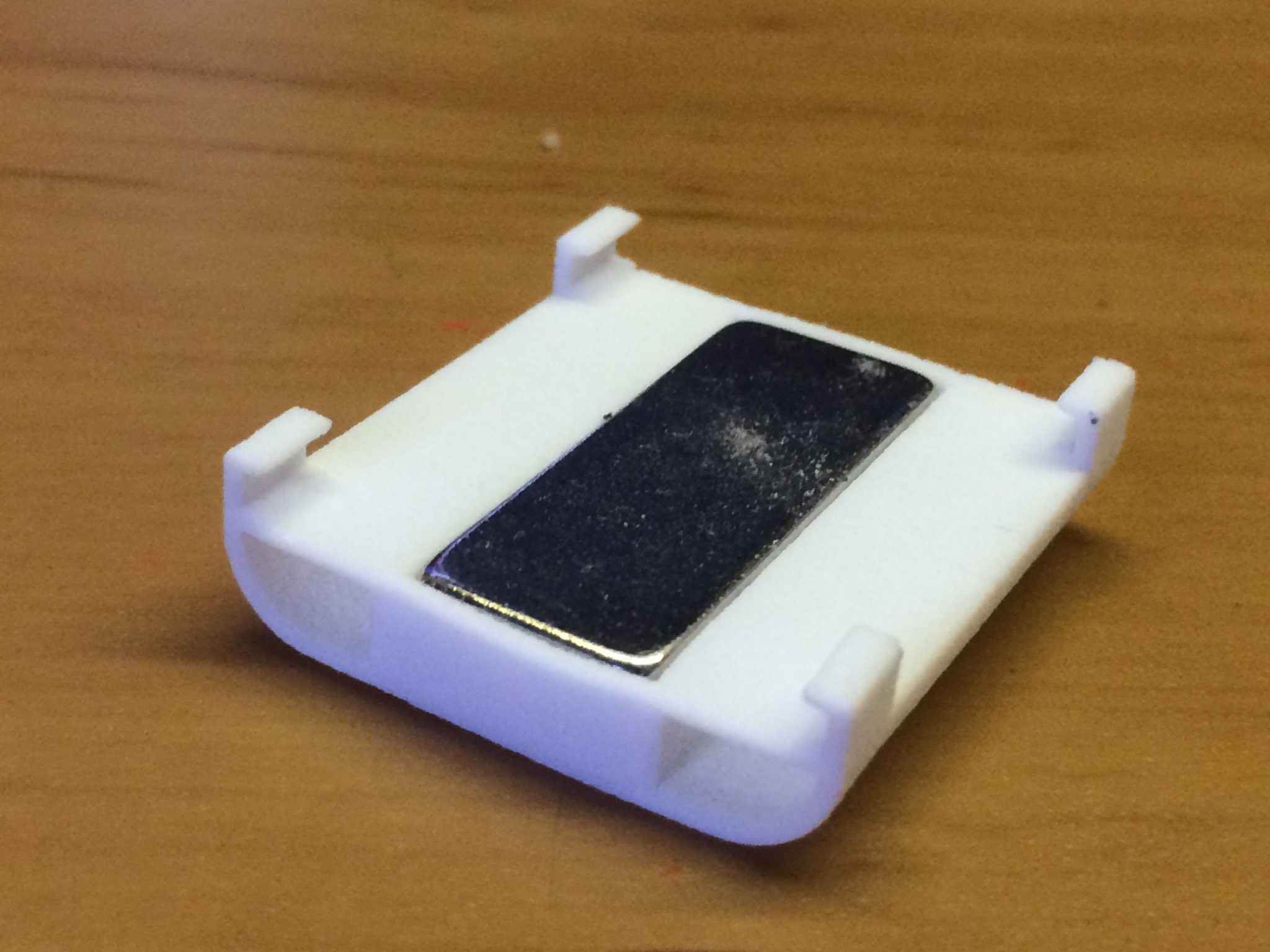
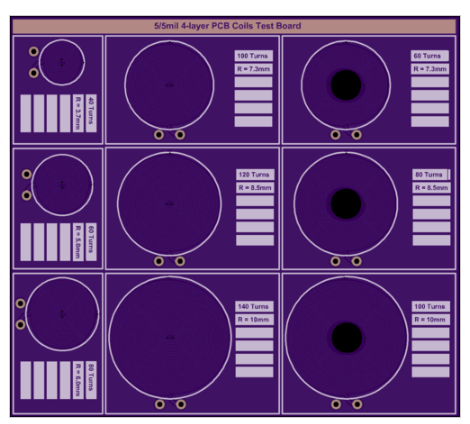
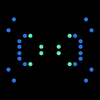
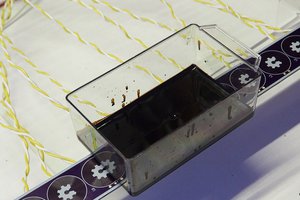
The coils of this motors are made from 5/5mil coreless pcb windings. A 3d-printed rig with magnets is used to slide across the pcb and is actuated by the winding's magnetic field.
All design files for this project are also open source.
Thank you oshpark.com for supporting this project.
















 paulusjacobus
paulusjacobus
 Elecrow
Elecrow
Hey what were your findings about using an iron core?