0%
0%
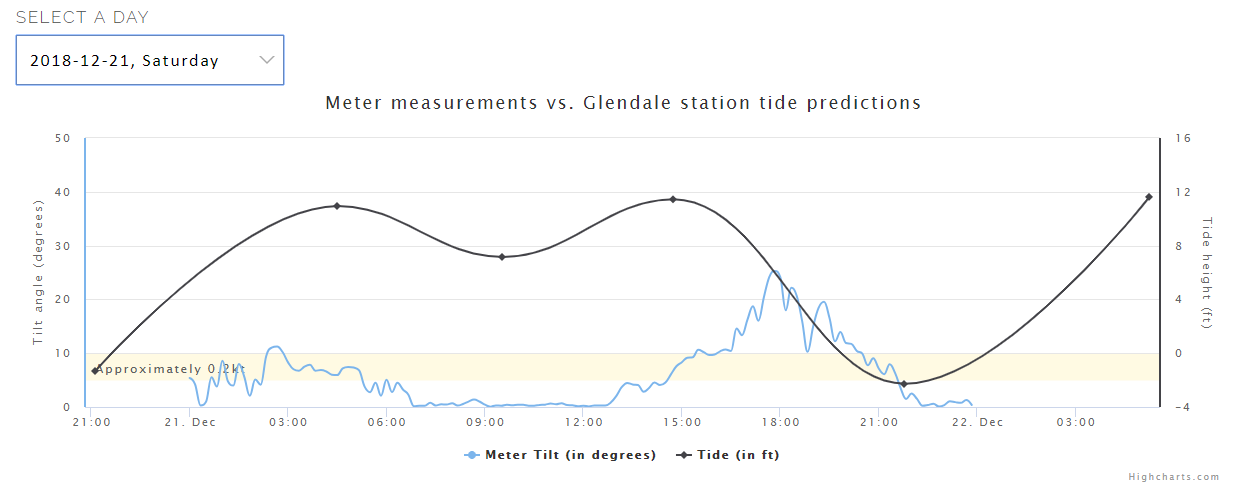
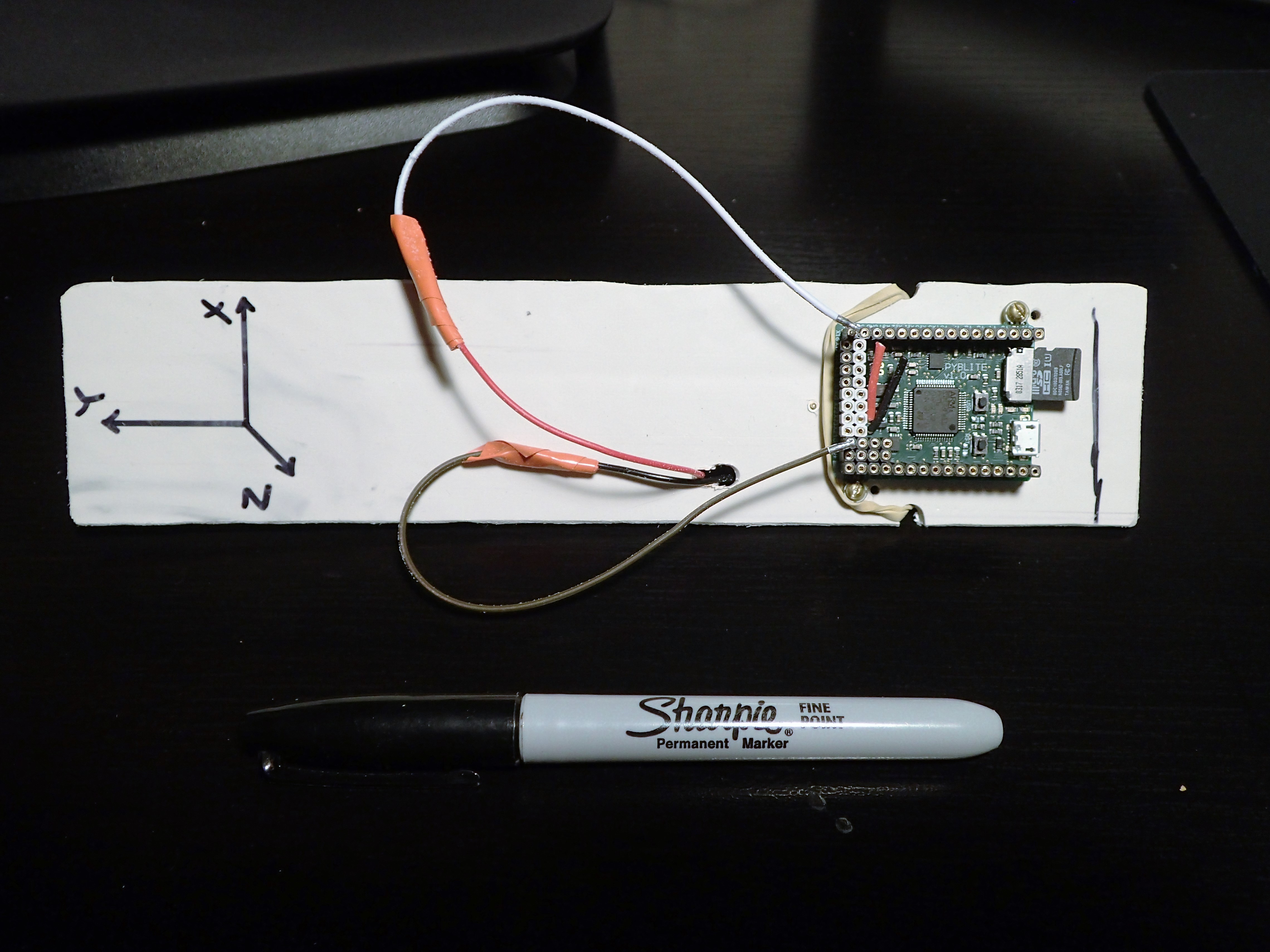
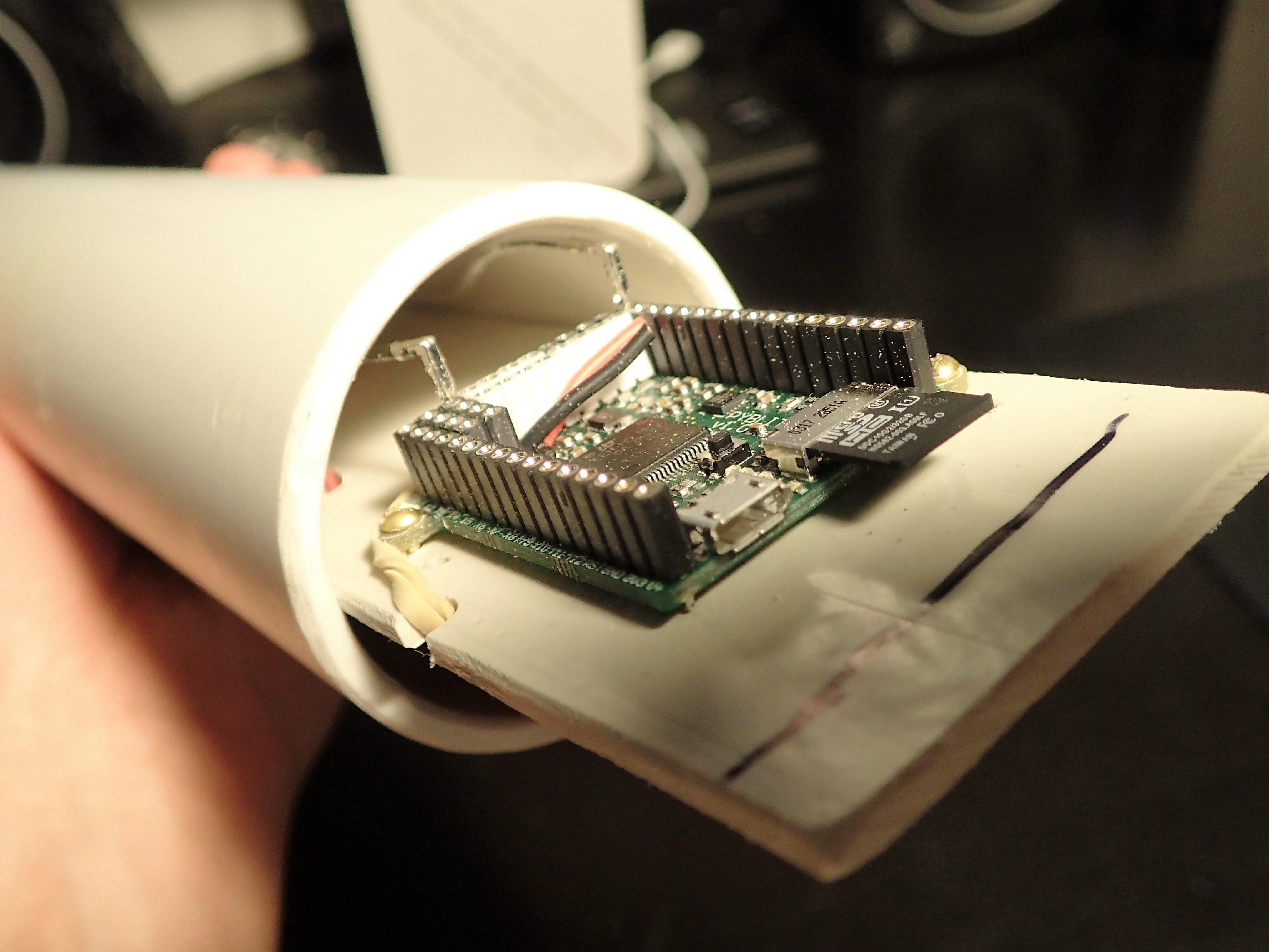
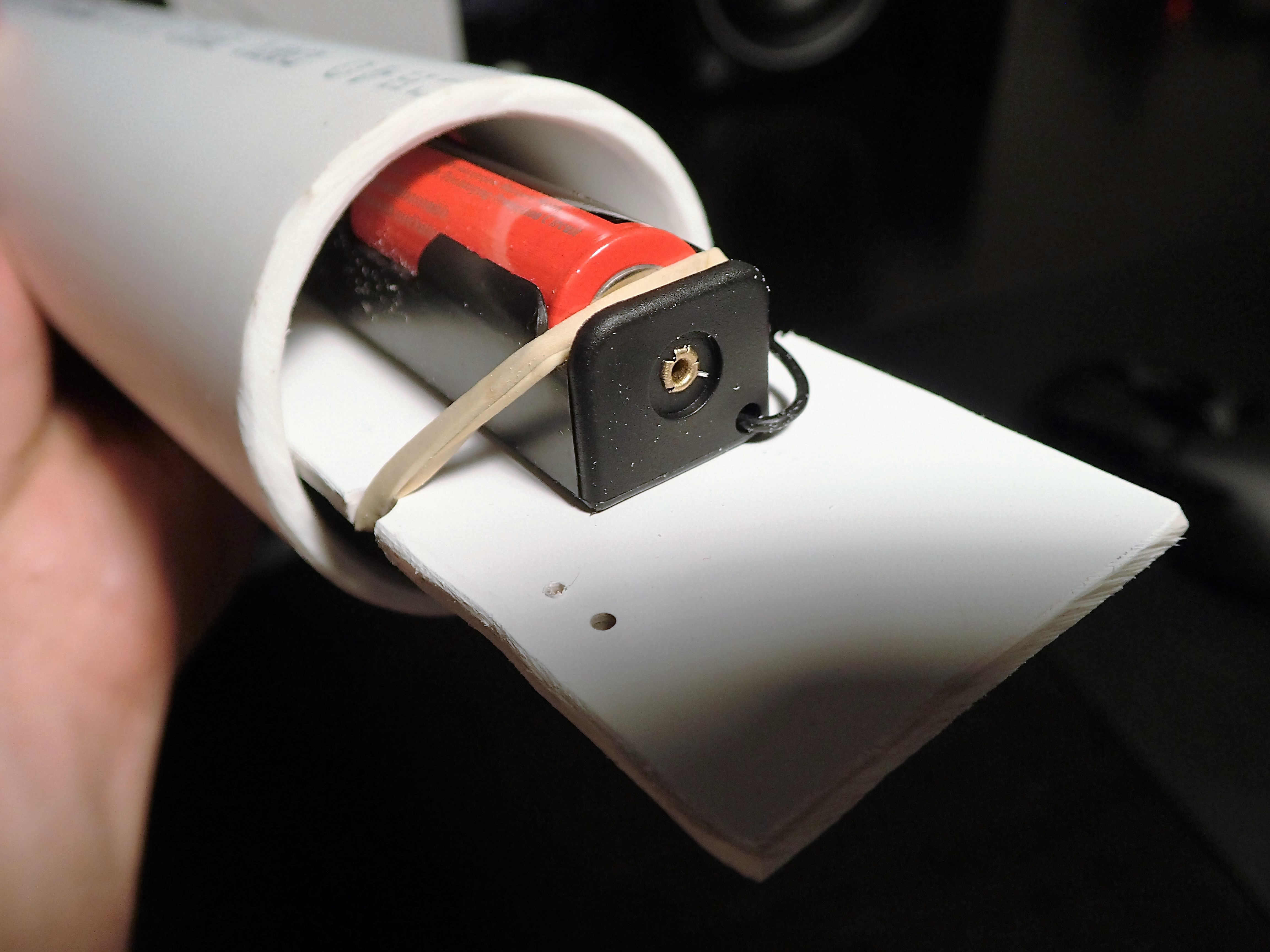
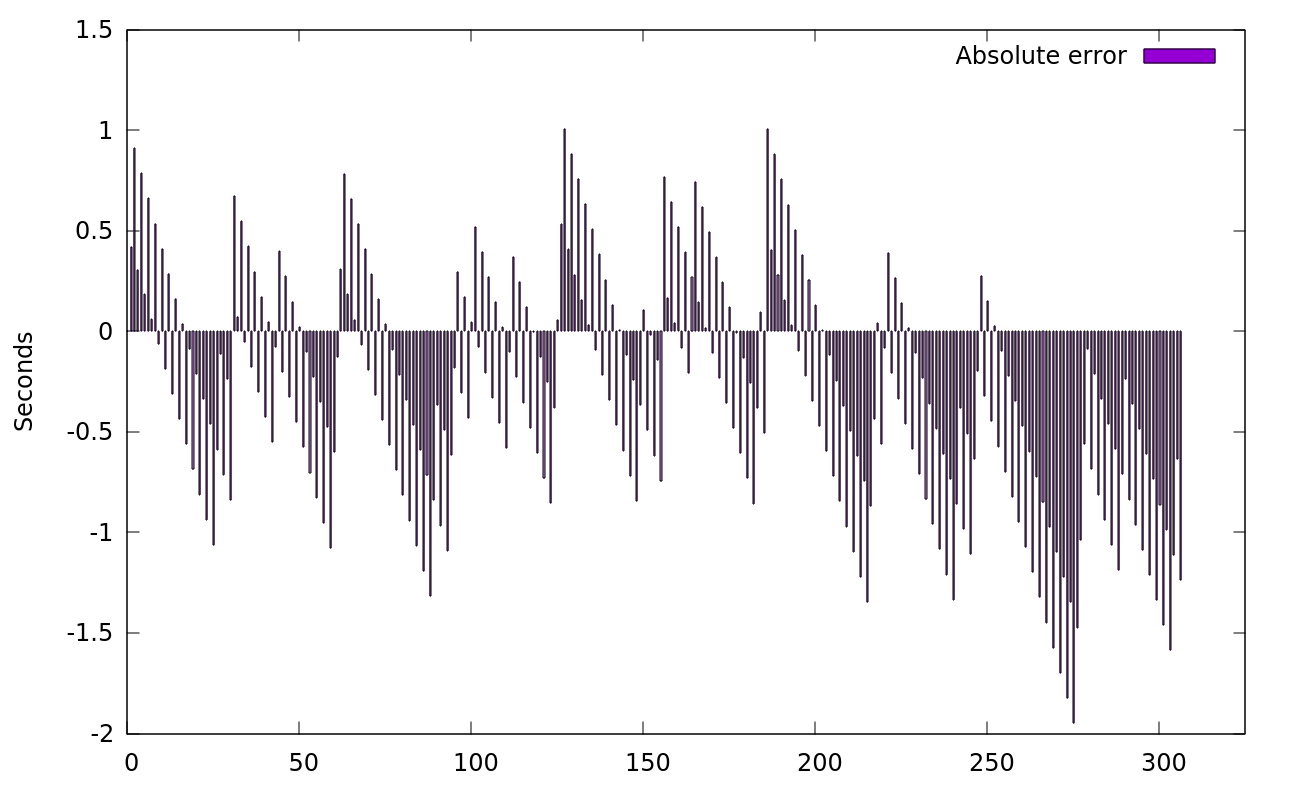
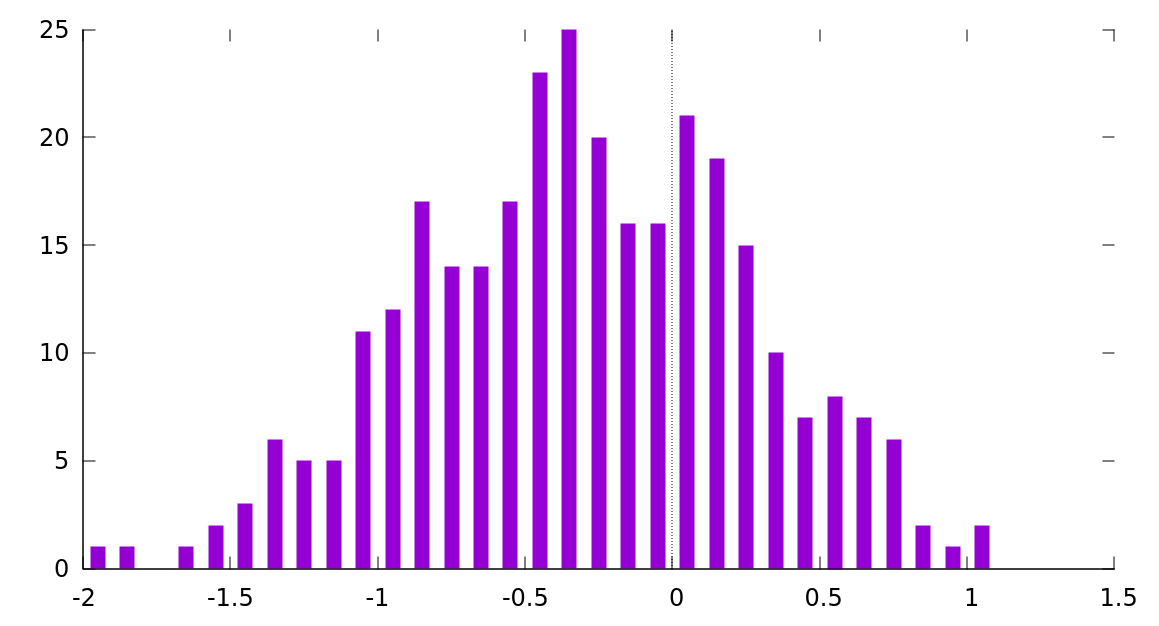
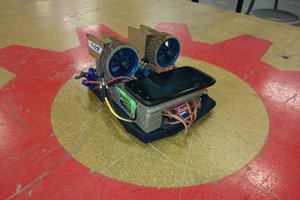
Cheap underwater tilt current sensor.
Cheap (<$100) underwater current sensor that can be deployed at 70ft depth.
Your thoughts, comments and advice are very welcome here!
 Max Kviatkouski
Max KviatkouskiBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests









 Brook Patten
Brook Patten
Hey already responded on our local marker bouy diving forum before i saw this page. Glad to see folks working on solutions to this.
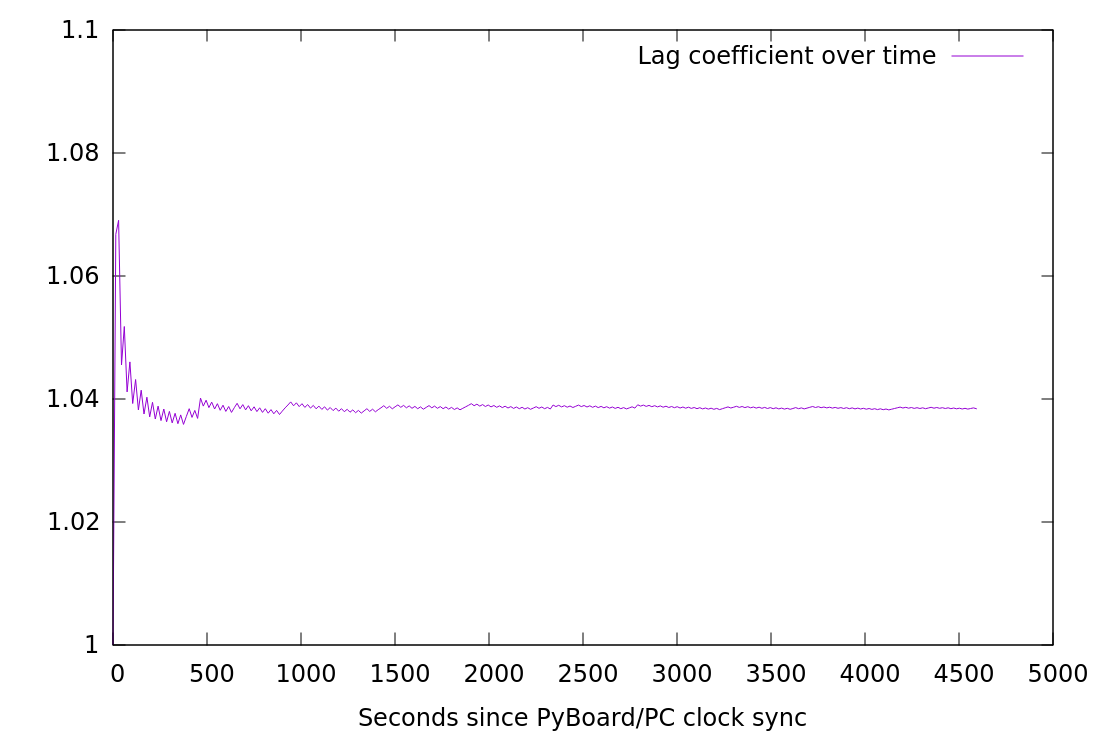
Based on what you saw in the field do you have ideas about what might cause some of the data abnormalities in the readings? Any ideas about the design (shape, distance from pivot, etc) that might be preventing it from registering current during the smaller exchanges?
As mentioned I love the idea of having some inexpensive device(s) we could deploy at various potential dive sites to calculate hyper localized current corrections and patterns. Could help explain some really weird currents I've experienced in a few strange places as well. A tilt based design would be fantastic vs a moving part design if it can produce clear enough data.
Since I'm local let me know if I can help. My garage setup is small but I can help with 3d printing parts, cutting pcb boards (cnc), light cnc milling, etc.