 Max Kviatkouski
Max KviatkouskiFirst weight system to make buoy less buoyant was captured in https://hackaday.io/project/158083-cheap-underwater-tilt-current-sensor/log/150221-my-concerns-regarding-weighting-the-buoy-properly.
That system had following advantages in my opinion:
- Cheap
- Robust
Disadvantages:
- It didn't work :) (more about it below)
- Cannot fine-tune weight
- A bit difficult to mount
- Lack of radial balance far from central axis of the buoy can create rotational moment
- Poking rods might catch kelp which will increase buoy drag (in summertime it is quite common that moderately sized pieces of kelp and see weeds are carried by current).
Four rebars were too heavy. So I decided to upgrade system a little bit and leave two rebars and add two stainless steel bolts in the upper part of the buoy to allow addition of washers. I cannot mount anything co-axial to the buoy since bottom is rubber cap and top is - PVC cap and my attempts to glue some PVC nut to it with PVC cement or superglue failed. If I drill it, I'll have to deal with sealing it nicely (which I'm trying to avoid as much as possible).
Long story short - that didn't work either. Too much weight on top of the buoy and my buoy was going upside down. But during my attempt to weight the buoy for the second time I got following valuable observations:
- Approximate weight I need to make my buoy neutral is around 487g (±11g - weight of one washer)
- Vinyl tape I used to protect tethering rope from wear and tear is rigid enough to affect buoy position. If buoy was more massive and more buoyant it wouldn't matter probably. Had to remove it.
Also I've attempted to pull my buoy attached to 5lb dumbbell disk (acting as an anchor) and it turned out it is really hard to do it. My plastic measurement tape frame doesn't seem to take that kind of load really well. On top of that I had to hold onto something with my legs to stay in place. So next time I'll do following:
- Make simple sleigh out of PVC (because bottom inclined and I'd like my buoy stay at the same depth and follow direction of the pull instead of sliding down the hill)
- Put around 2lb on that sleigh
- Add fixed mount points for the buoy and for measurement tape.
Now, back to weighting. After some thinking I've decided to try this system:
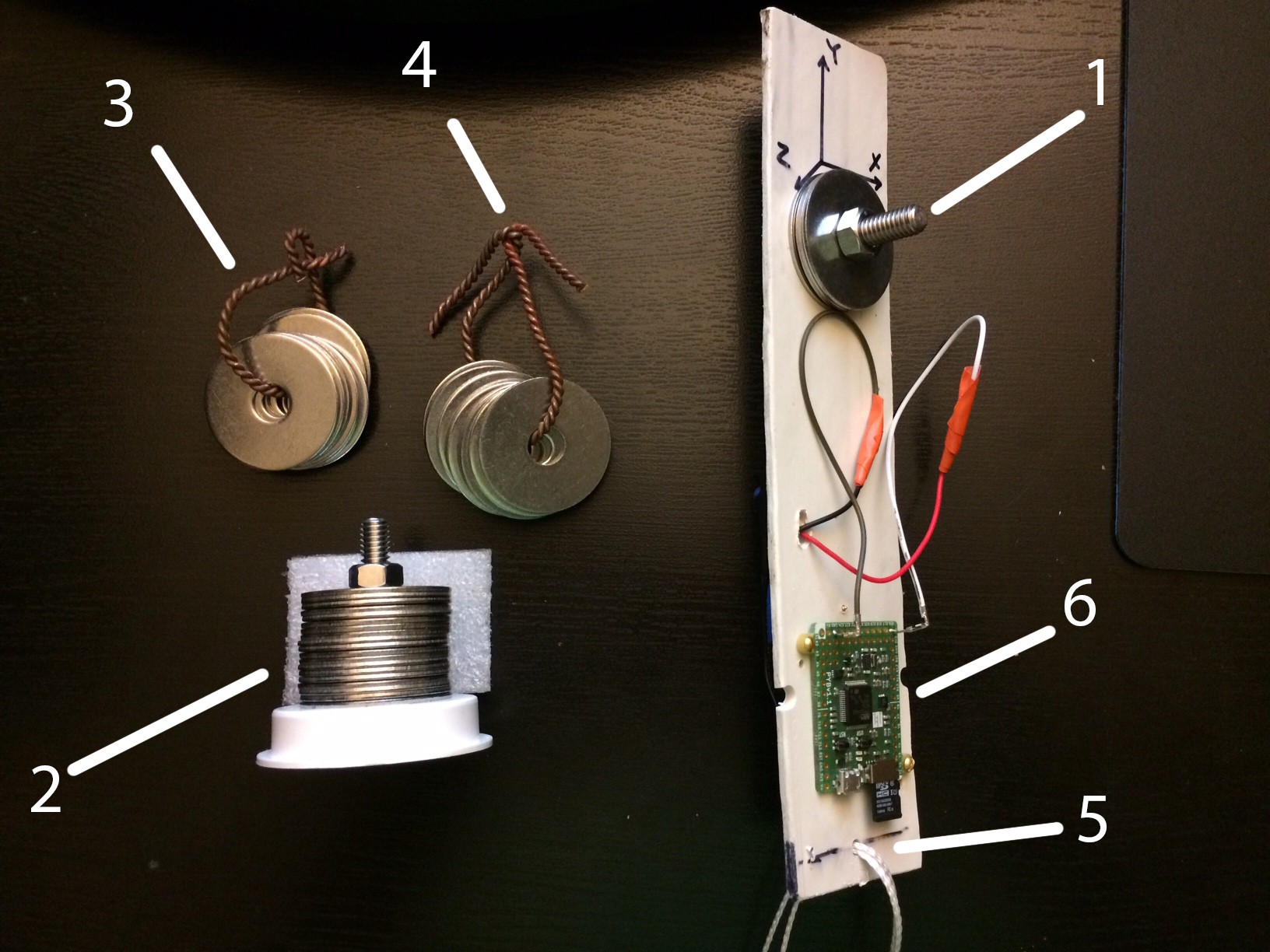
- Top weight (5/16-18 1.5' stainless steel bolt + 4 washers on each side)
- Bottom weight (5/16-18 2' stainless steel bolt + 20 washers. One of the washers is on the other side of the cap (cannot be seen here) to prevent bolt being pushed through the whole when rubber cap intrudes into the housing at depth)
- My guess of how much is missing till buoy is neutrally buoyant (I'll just hook that wire onto the buoy tether rope) (that's how much buoyancy I plan for the buoy to have - around 92g. That's approximately 1/5th of what it was)
- Extra washers if I need them underwater.
- Loop to pull this core platform out of housing. It fits very tight now and I like to keep it this way (nothing is swinging inside of the housing and I don't have to have any other means of attaching things to the housing). Since I've added bolt #2 I need to push this platform deeper into the housing. This loop has been made so I don't have a problem pulling it out later.
- PyBoard v1.1 with accelerometer. (Replaced PyBoard Lite with accelerometer).
Advantages of this weight system:
- Simple. Takes just a few holes and screws.
- Easy to mount.
- Don't have to use stainless steel parts since it's all inside of the housing (stainless steel bolts and washers are expensive!)
- Allows top/bottom trim
- Quite centered around main buoy axis
- Nothing is hanging outside of the buoy waiting to catch that seaweed leaf
- Can be pretty precise if using different size washers
Disadvantages:
- Cannot weight a buoy and then leave it for logging in one session. (Because weight needs to be put inside of the housing).
- Figuring out resulting buoyancy might be a bit tricky since you place weights in the water during weighting procedure (washers loose a part of weight equivalent to the weight of the volume of water displaced by them) but for deployment you put those weights into the housing so they do not displace any additional water anymore. Can be solved with pretty trivial math though.
I plan to go and try to weight my buoy properly during my next dive this week (possibly).
Also a few notes on PyBoard v1.1. PyBoard Lite with accelerometer has really crappy RTC. I wrote some code to do two clock syncs with my PC (before and after deployment) and then adjust log timestamps accordingly but there is a problem still. If battery dies during logging that means I have no way to tell how much that RTC was off. Possible options were:
- Setup external RTC
- Connect small battery just to keep RTC alive
I didn't like both options as requiring extra work. I figured that PyBoard Lite might be a perfect candidate for my upcoming Bluetooth log downloader. So I went ahead and ordered a regular PyBoard here. I'm yet to check PyBoard RTC accuracy in the long run but so far it looks alright.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.