 Michael Mayer
Michael MayerTo see if the idea works at all I started with a quick build based on Fischertechnik and some hot glue.
The small Fischertechnik gear "Riegelscheibe Z20" fits perfectly on the 4mm part of the Luer connector. It is actually a gear with 20 teeth, modulus 0.5mm, and mates with the gears from the cheap china bags (80 gears for 2$).
A 42 teeth single gear from this bag is easily glued onto the cut down 4-way servo horn that comes with the SG-90 servo. The gear hub fits perfectly inside the mounting groove of the servo horn and make aligning and centering of the gear very easy.
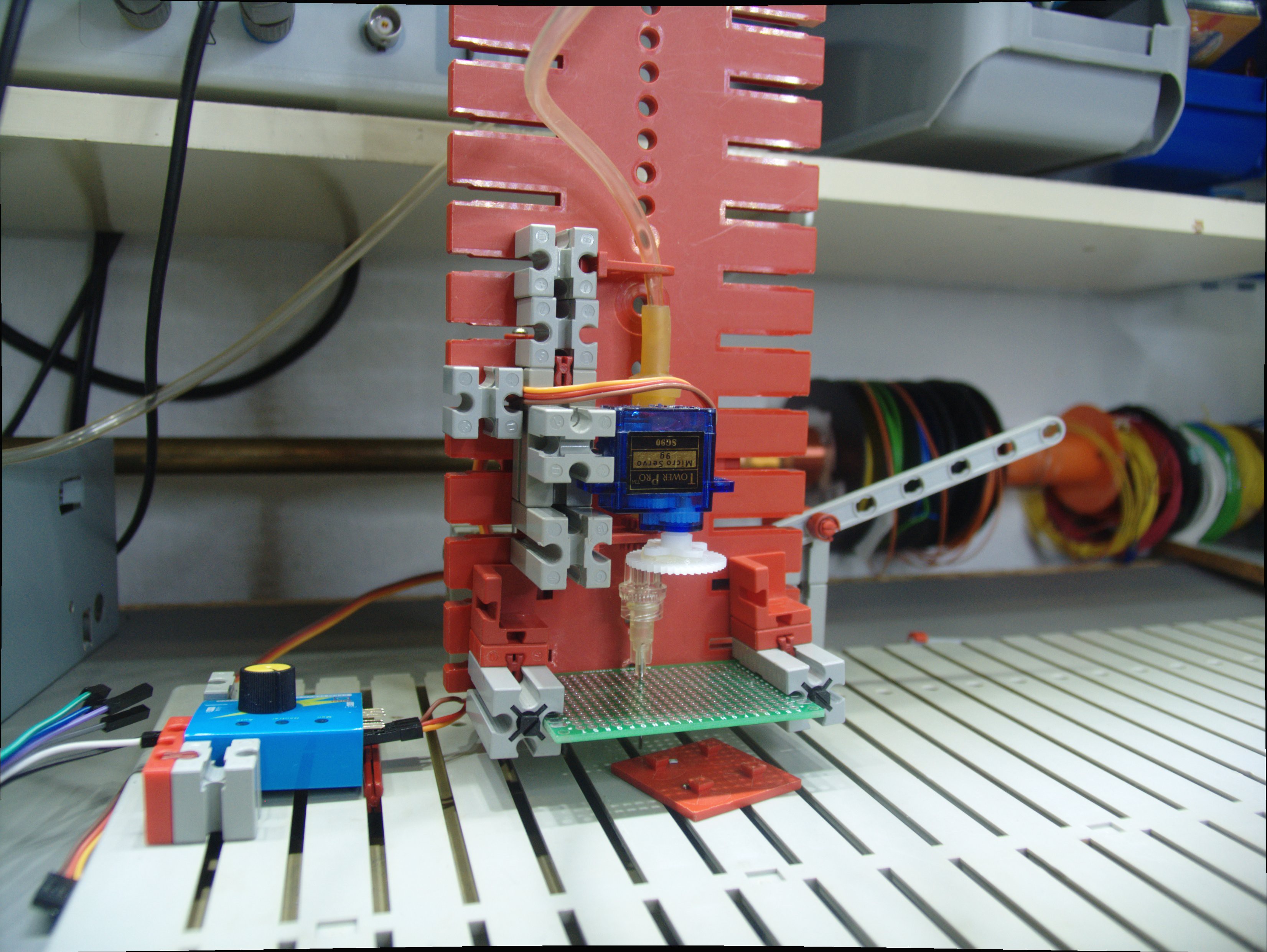
The servo is hot-glued to a Fischertechnik element and we are ready for the first test:
The test shows that the needle is still excentric, even when properly connected with a Luer connector. The small piece of PCB helps holding the needle centered, but it is clear that even more guidance will be needed to keep things strait.
Conclusion: The general idea works, but it won't be a high precision device. It will need at least two supports for the needle. 0805 is already easy, 0603 should work but 0402 is questionable, even with two supports for the needle.
Conclusion 2: Fischertechnik is amazing! It makes it very easy to test several construction approaches and to find out with one works best.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.