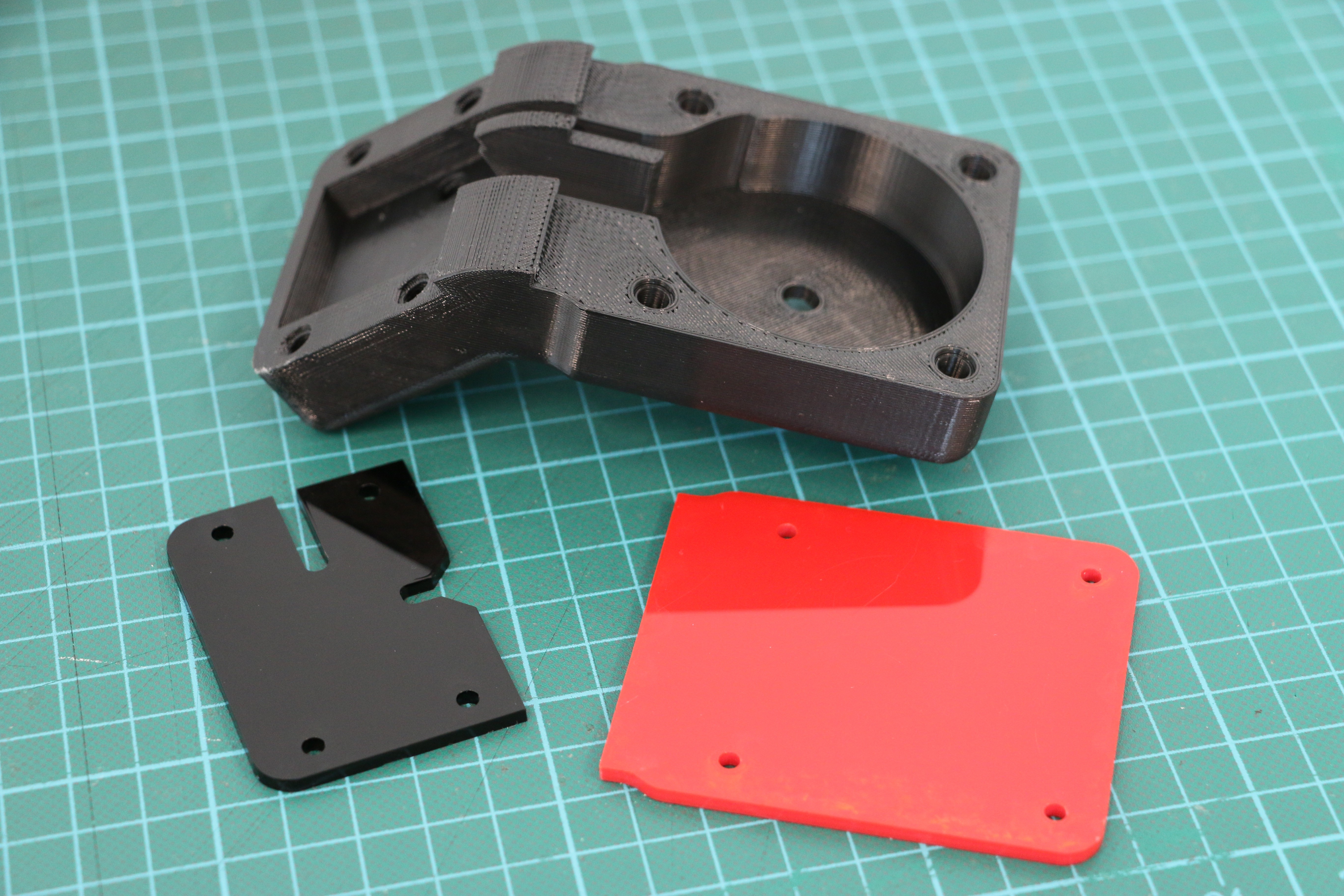
Now that the sensor casing design is finalized it’s time to print two more to complete our three-sensor setup for the turtlebot3. Each case also needs heatset inserts and covers. Our covers are lasercut from acyrlic, but can be 3D printed if need be. For assembly instructions see the instructions page.
Here is one case with covers before assembly:
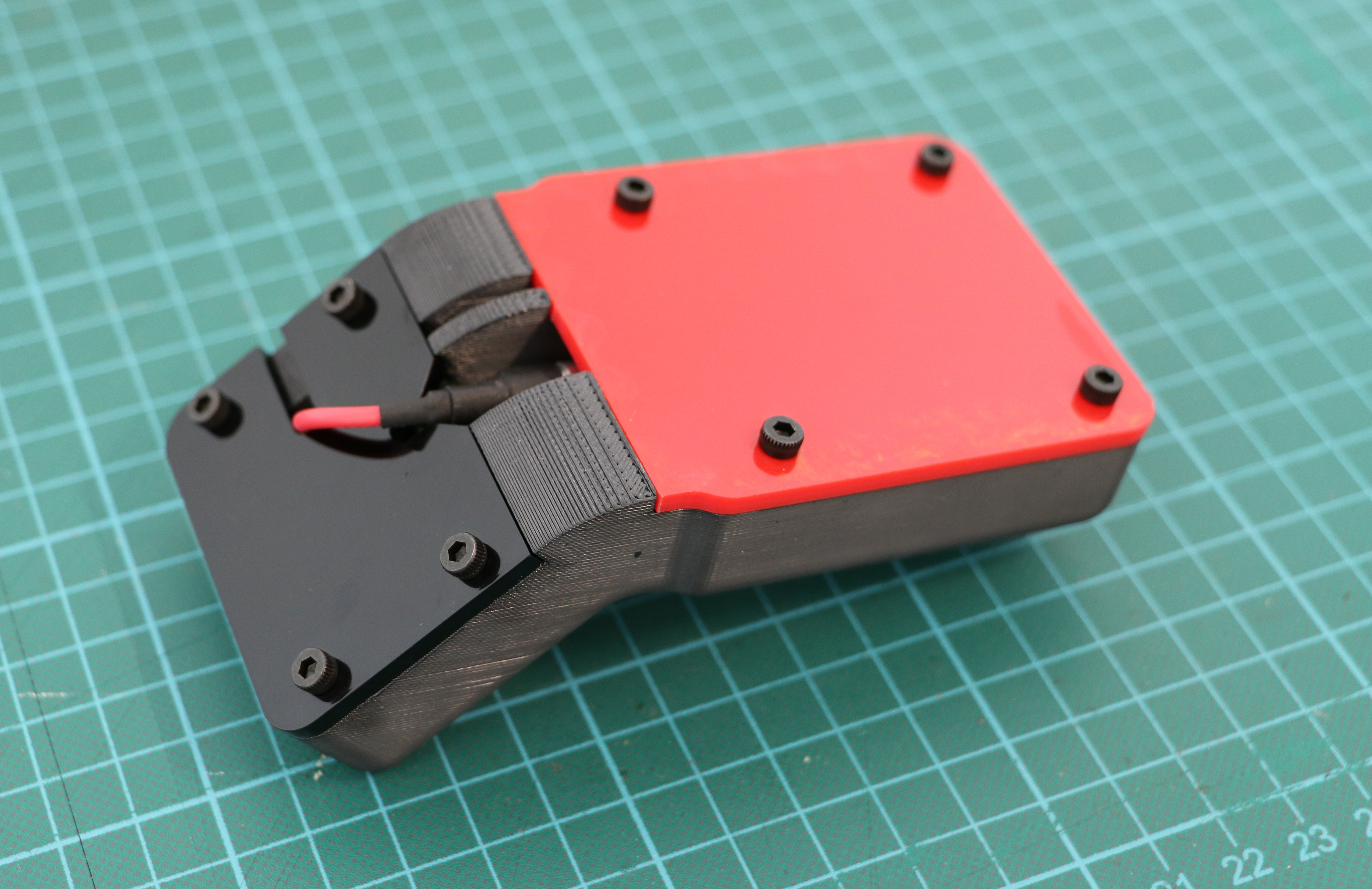
Here is one case/sensor full assembled:
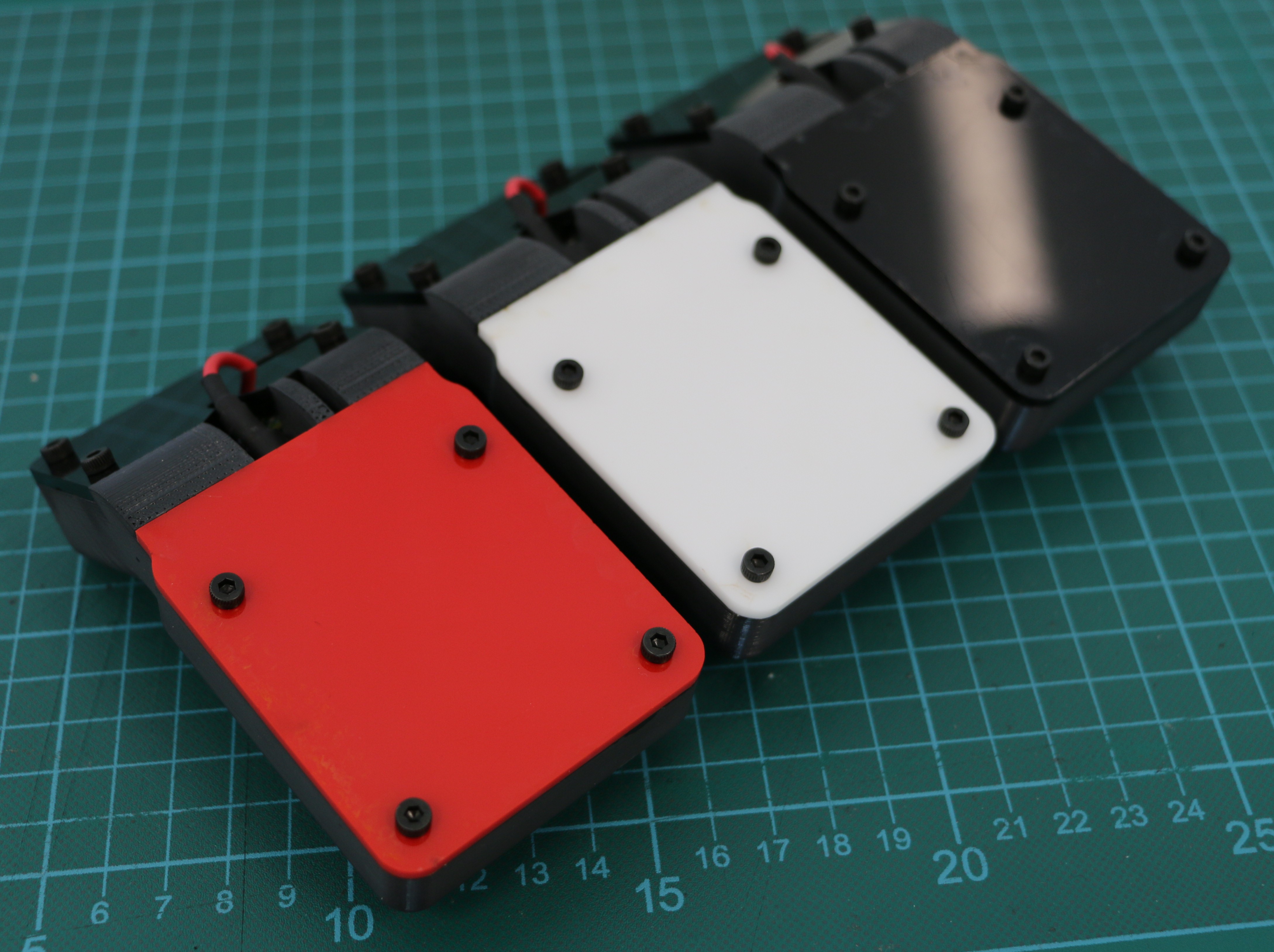
Here are the three assembled sensors in their cases with covers:


The case is designed to mount on a robot using long (20 mm) M3 screws via two holes spaced 40 mm apart. This will allow easy connections with robot projects. In the coming weeks we’ll be mounting the sensor on a Turtlebot3 Burger, so stay tuned!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.