Version 1.0 of the sensor case is complete and printed! Our goal is to design a radioactivity sensor package that is physically robust, simple, and easy to construct. We will be using a Turtlebot3 Burger robot for initial testing but also want the sensor package to be easily affixed to other robots, so the sensor attachment system also needs to be flexible.
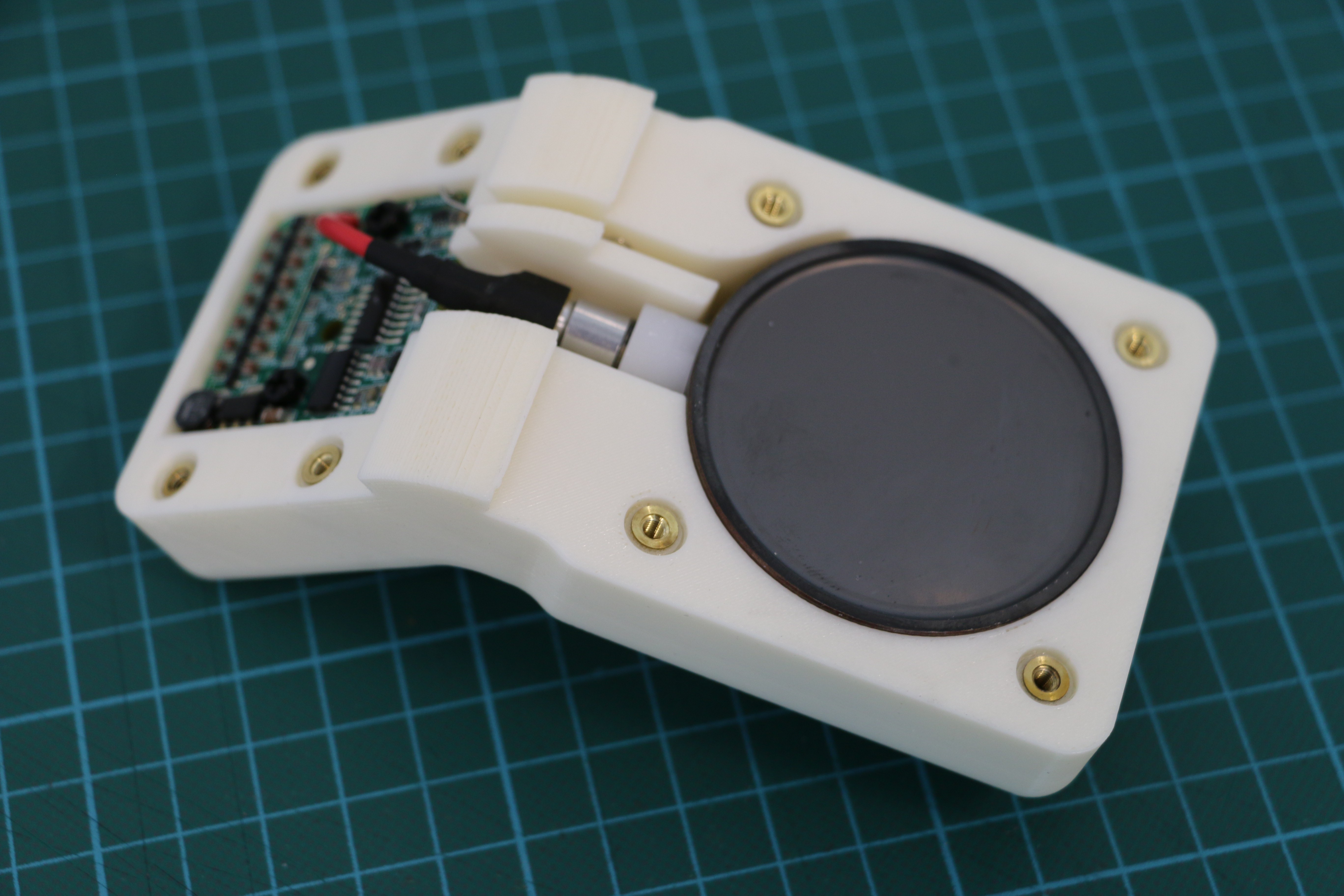
The design is made to be 3D-printed, and encases the Geiger tube and electronics, keeping the high voltage components shielded from wandering fingers. The PCB is also angled back from the Geiger tube to prevent shielding effects.
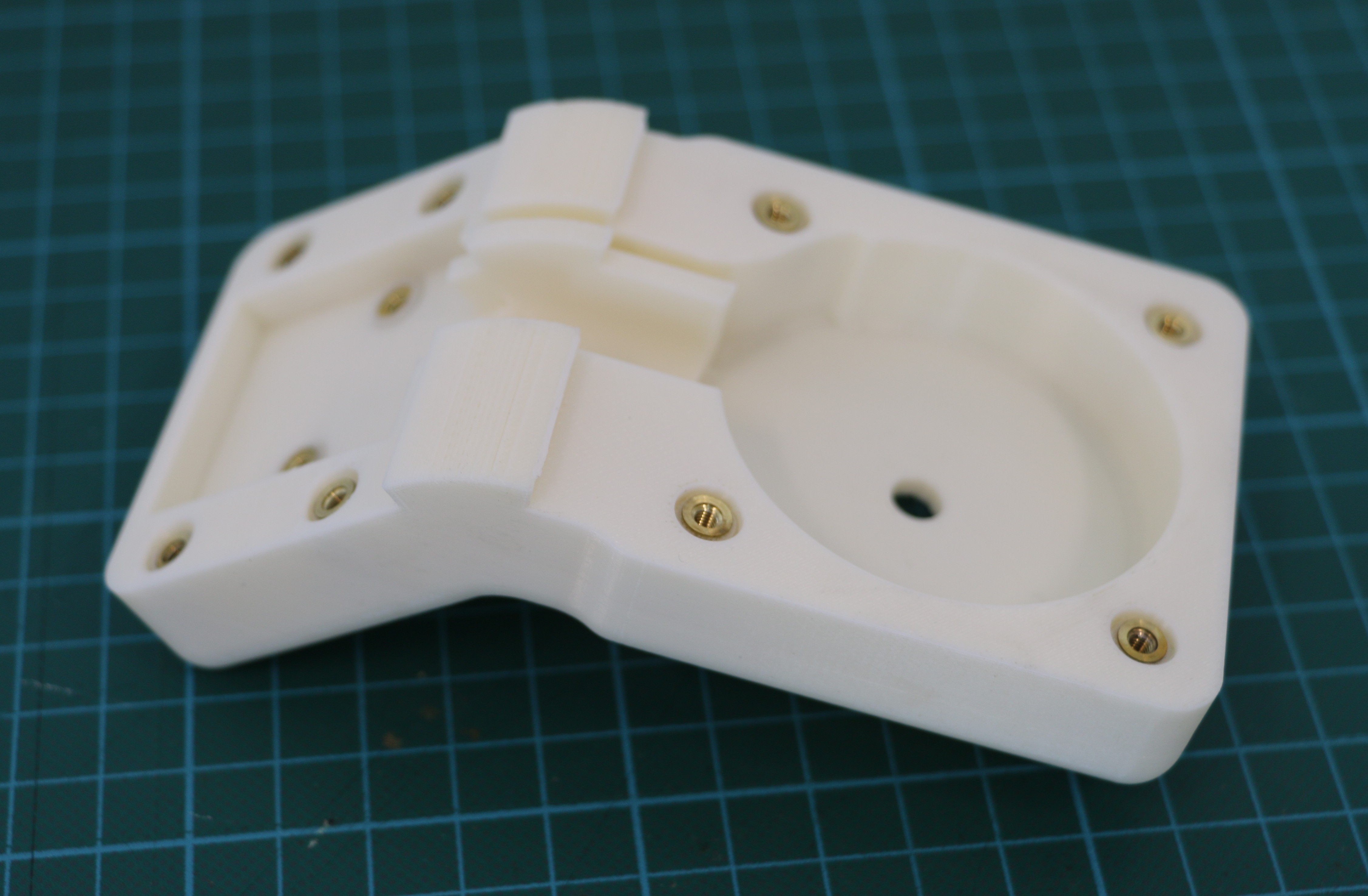
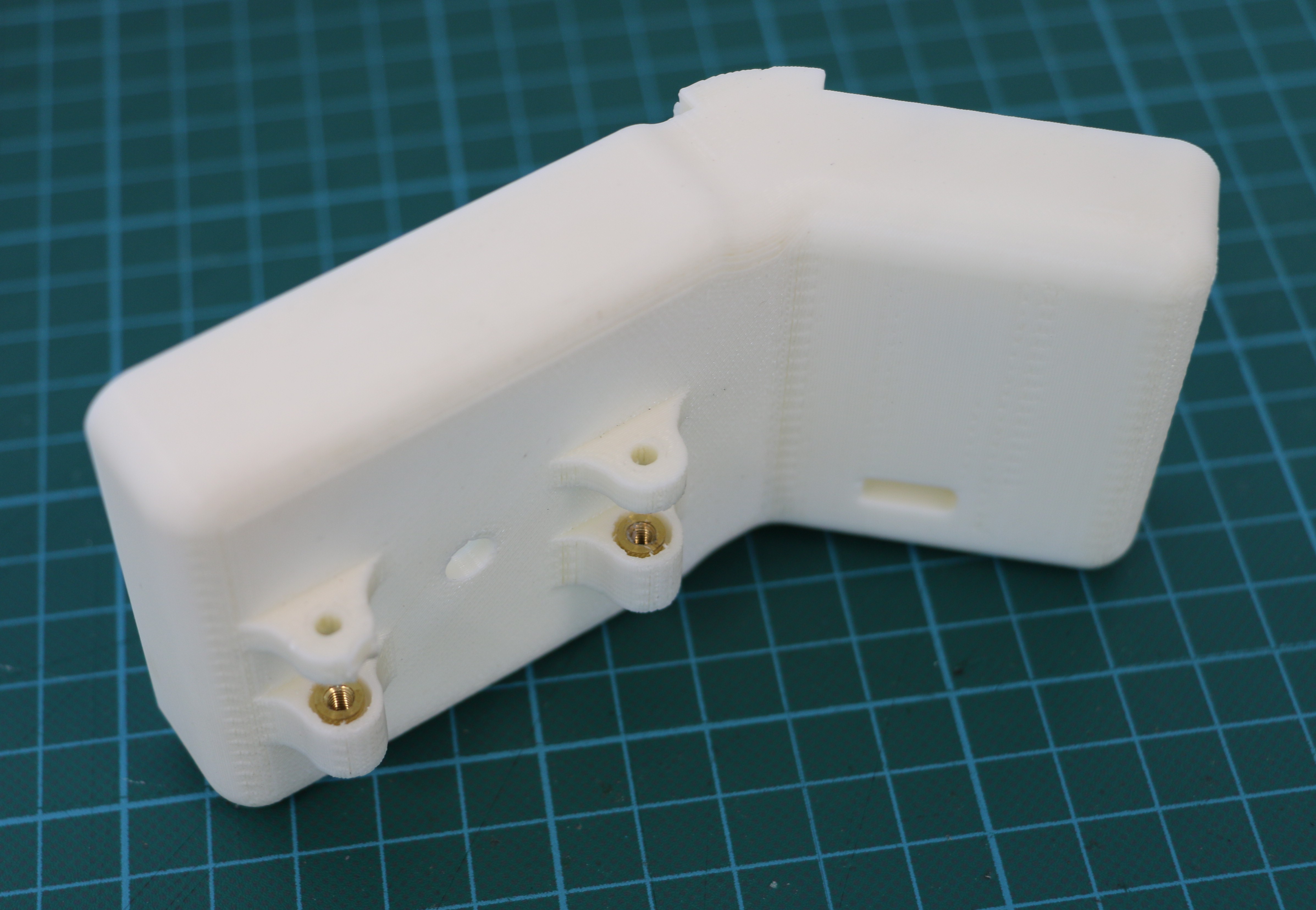
Everything is held in place using M3x8 mm screws and Heatset threaded inserts. The inserts worked quite well.
Version 1.0 turned out well, but needs some slight modifications. In particular, the cavity for the Geiger tube is too tight and the electronics section is slightly too far again from the Geiger tube, which strains the cable. We also need to widen the connector hole on the back and deepen the electronics cavity. It’s not bad for a first iteration, and we’ll be making these changes soon and printing Version 1.1.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.