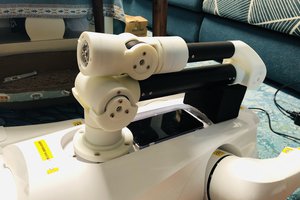
Built of a parametric arm to catch elements.
Sizes of arm can be easily changed in design, a version with a belt and one with a worm are designed. Many parts are 3D printed, other are standard low cost parts.
Electronic card working with a nucleo is designed, with serial exposed for ESP8266 for example, can bus is also exposed.
Software API for moving arm at (x, y, z) position is given, with information when arm raised position, and caught something or not.
 GEEKROS
GEEKROS
 Daniel Mead
Daniel Mead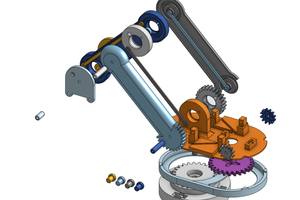
 Tim Wilkinson
Tim Wilkinson
 Jordan Réjaud
Jordan Réjaud