 SHAOS
SHAOSAs I wrote above, before 2004 nedoPC SDK was called RW1P2 (Robot Warfare 1 Platform 2). A few versions was officially released (initially it was only partially open source with executables prepared for DOS, Win32 and Linux):
- RW1P2 v1.0 (28-APR-2001) - cross development for Orion-128 and ZX-Spectrum using 8080 coding and tiled graphics
- RW1P2 v1.1 (15-MAY-2001) - cross development for Orion-128 and ZX-Spectrum
- RW1P2 v1.2 (16-JAN-2002) - cross development for Orion-128, ZX-Spectrum and Radio-86RK
- RW1P2 v1.2.1 (18-JAN-2002) - cross development for Orion-128, ZX-Spectrum and Radio-86RK
- RW1P2 v1.3 (20-JAN-2002) - cross development for Orion-128, ZX-Spectrum, Radio-86RK and Spetsialist
- RW1P2 v1.4 (12-JUN-2002) - cross development for Orion-128, ZX-Spectrum, Radio-86RK, Specialist and also Z80 specific coding for ZX-Spectrum (with TR-DOS support) and PetersPlus Sprinter
- RW1P2 v1.5 beta aka Sprinter SDK (26-APR-2003) - only Z80 specific coding for PetersPlus Sprinter and only for Windows
- Never released version of nedoPC SDK (last update 23-JAN-2006) - added pixel level graphics for ZX-Spectrum and nedoPC font 8x8 pixels
Also initially I wrote some m68k rules to support Palm Pilots and 8086 rules to support IBM PC in RW1P2, but this effort was never completed and nothing from it was published.
CREDITS & ACKNOWLEDGEMENTS
It looks like in 2001 I "borrowed" 16-bit math subroutines for 8080 microprocessor from SMALL C v2.1 by Jim Hedrix ( http://www.cpm.z80.de/small_c/smallc21.zip ) - more precisely from CLIB.ARC file and I see now that it even has its own copyright: Small-C Library: Copyright 1984 J. E. Hendrix, L. E. Payne
Also I used open source software from 2 other people to generate binaries for some specific targets:
- bin2rss.c by Viktor Pykhonin (to create snapshot file for emulator of Soviet computers Emu80) that is currently available under GPLv3 here and
- bin2trd.c by Vyacheslav Mednonogov aka "Copper Feet" (to create TR-DOS image for modern emulators of ZX-Spectrum) with unspecified license.
History of RW1 programming language started in 1998 when I released shareware game for programmers called "Robot Warfare 1" (it was featured in a few Russian computer magazines and British magazine "Computer Shopper" in 1999):
Programming language RW1 v2 (created by me in about 2000) was more C-like:
 and this version became programming language Robby
and this version became programming language Robby Purpose of this particular Hackaday project is resurrection of nedoPC SDK as a new fully open source (GPLv3) software development kit for DIY programmable devices and Retro computers with new GitLab repository: https://gitlab.com/nedopc/sdk
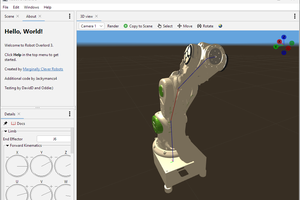
 Dan Royer
Dan Royer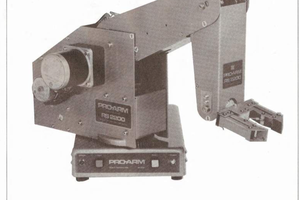
 LmBlueJay
LmBlueJay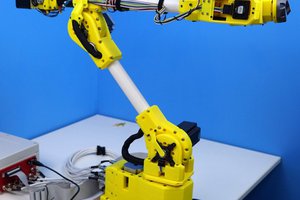

 Petoi
Petoi