 Bart//Bratke
Bart//BratkeInitial Prototyping |
Exploring ways of how a single module can be enabled to show behavior and autonomy and due to the space-packing, self-structuring and kinetic requirements of our design proposal, our research is grounded in the world of polyhedra and transformational geometry. The initial research and formfinding was grounded in specific polyhedra, their packing and decomposition logics and kinetic qualities - exploring how a geometry can transform and what are the implications on its connected surrounding
the unit |
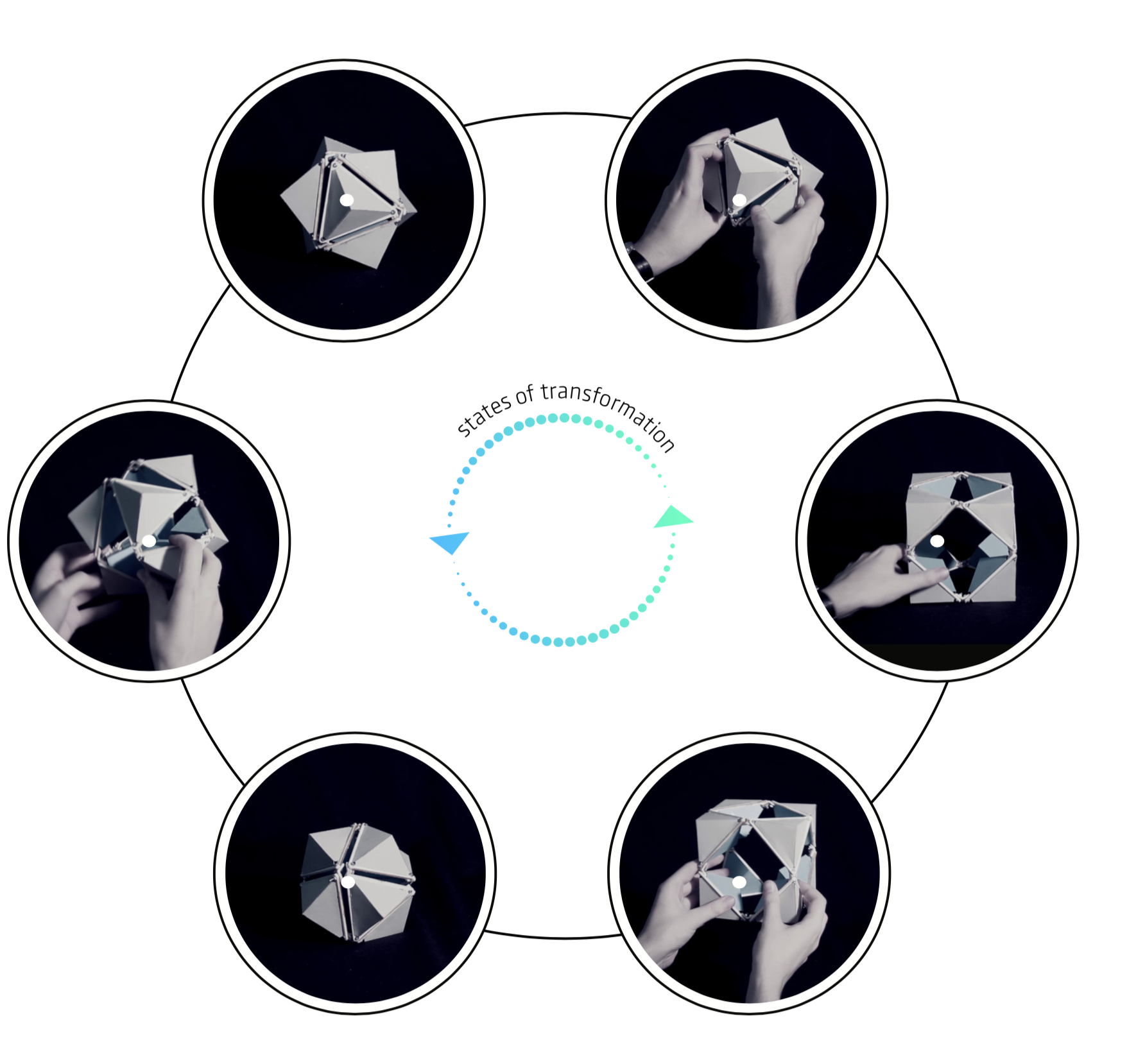
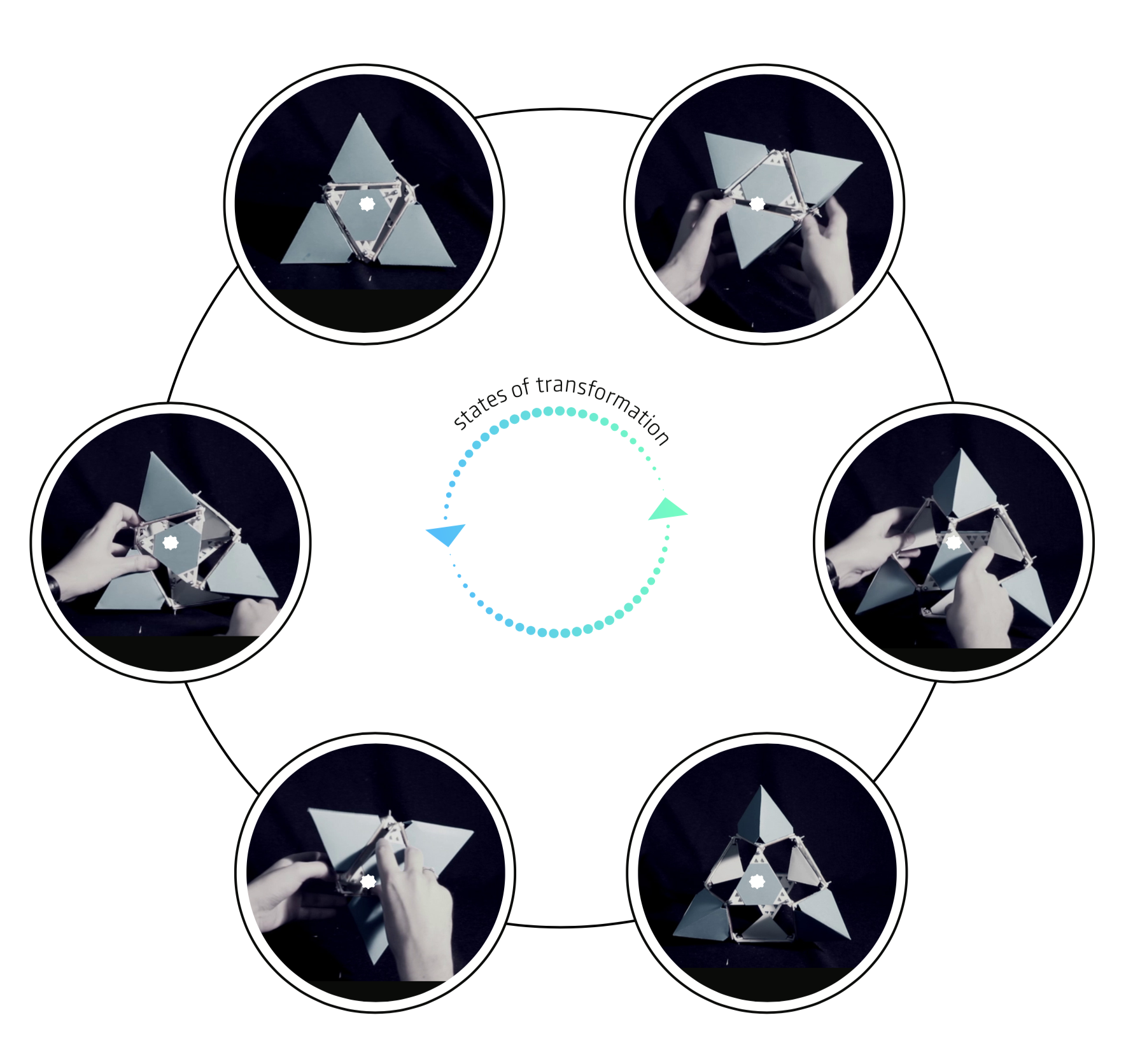
The unit, the system’s main building block, is based on a simple rotational movement of the faces of an octahedron around the vertices of its neighbor. Within this transformation, the unit starts from octahedral state, expands to an icosahedron, cuboctahedron, back to icosahedron an and octahedron again - expanding up to 1.5x in size, and changing both orientation and location of all its faces.
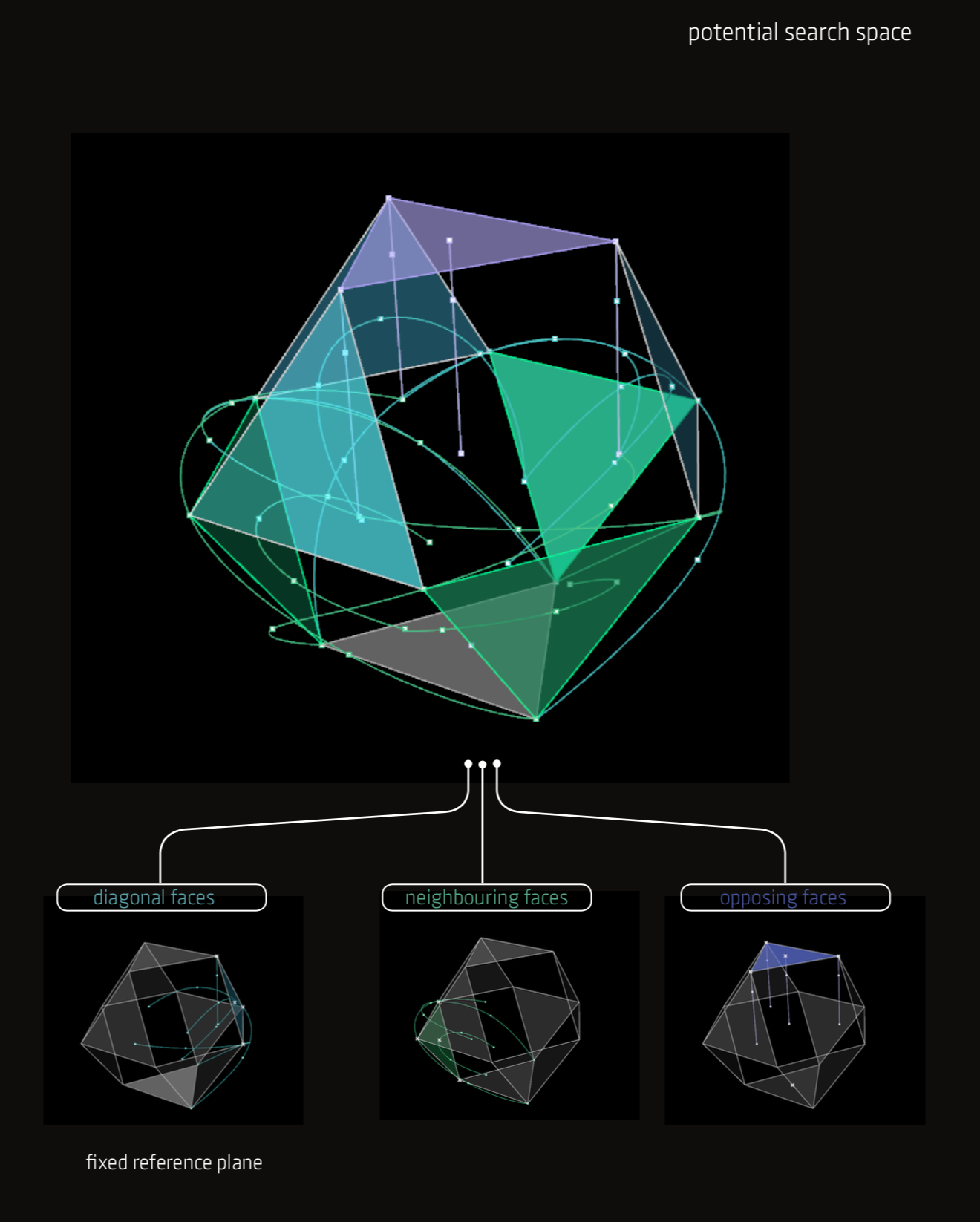
An analysis of the movment shows a series of different relational changes within one unit, from mere linear translating of opposing faces to relocation and rotation of diagonal faces. Changes that af- fect the units potential search space to aggregate, allowing new con- nections, resp. a local transformation reconfiguring other connected structures.
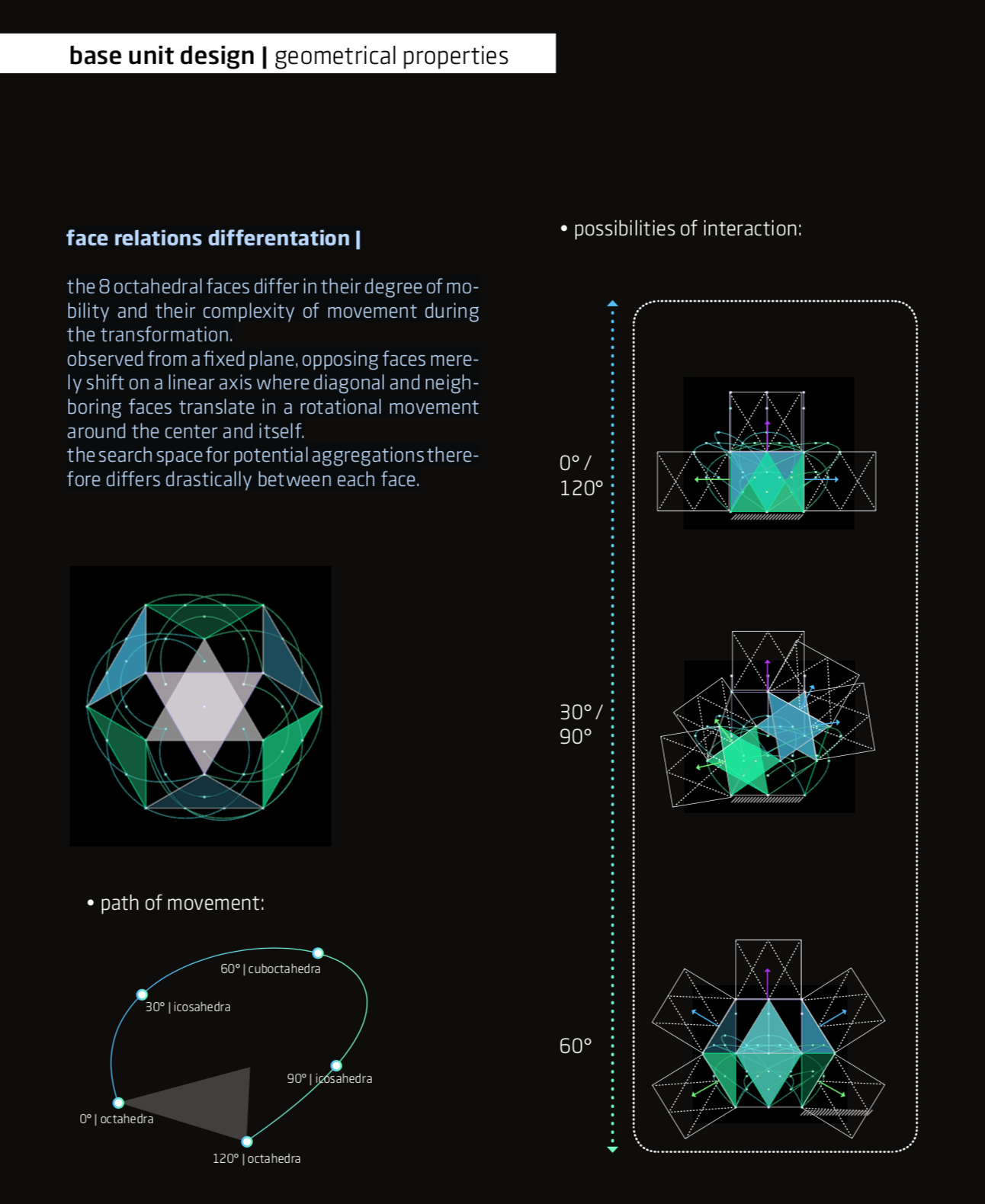
face relations differentation |
the 8 octahedral faces differ in their degree of mobility and their complexity of movement during the transformation. observed from a fixed plane, opposing faces mere- ly shift on a linear axis where diagonal and neigh- boring faces translate in a rotational movement around the center and itself.
the search space for potential aggregations there- fore differs drastically between each face.
In order to actuate the unit and enable it to act autonomous, different approaches from introduction of flexible unit to unit interfaces to internal mechanics and controls were explored.
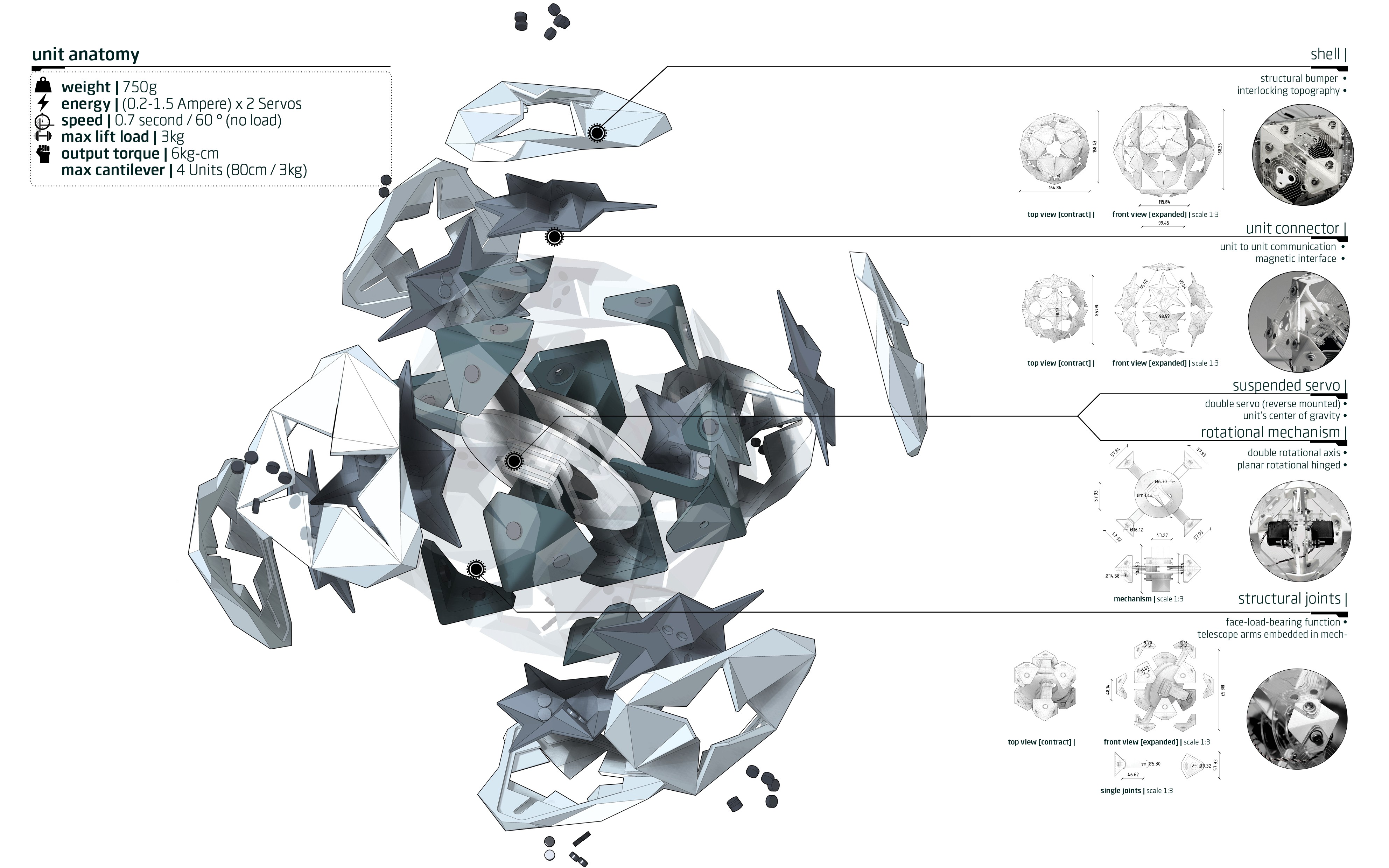
The main unit has several design features embedded that enable it to act autonomously and perform in a plug’n’play manner, The external shell follows two main function of Unit-to-Unit Interface: Construction & Communication between units, Construction is concerned with Connecting & Disconnecting and Interlocking between a Unit’s faces, Communication with Body-Plan Awareness and sequencing.
A single unit can be fabricated with simple diy components all parts except the electronics can be printed within 12 and assembled within 2 hours with any desktop 3d printer.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.