 Bart//Bratke
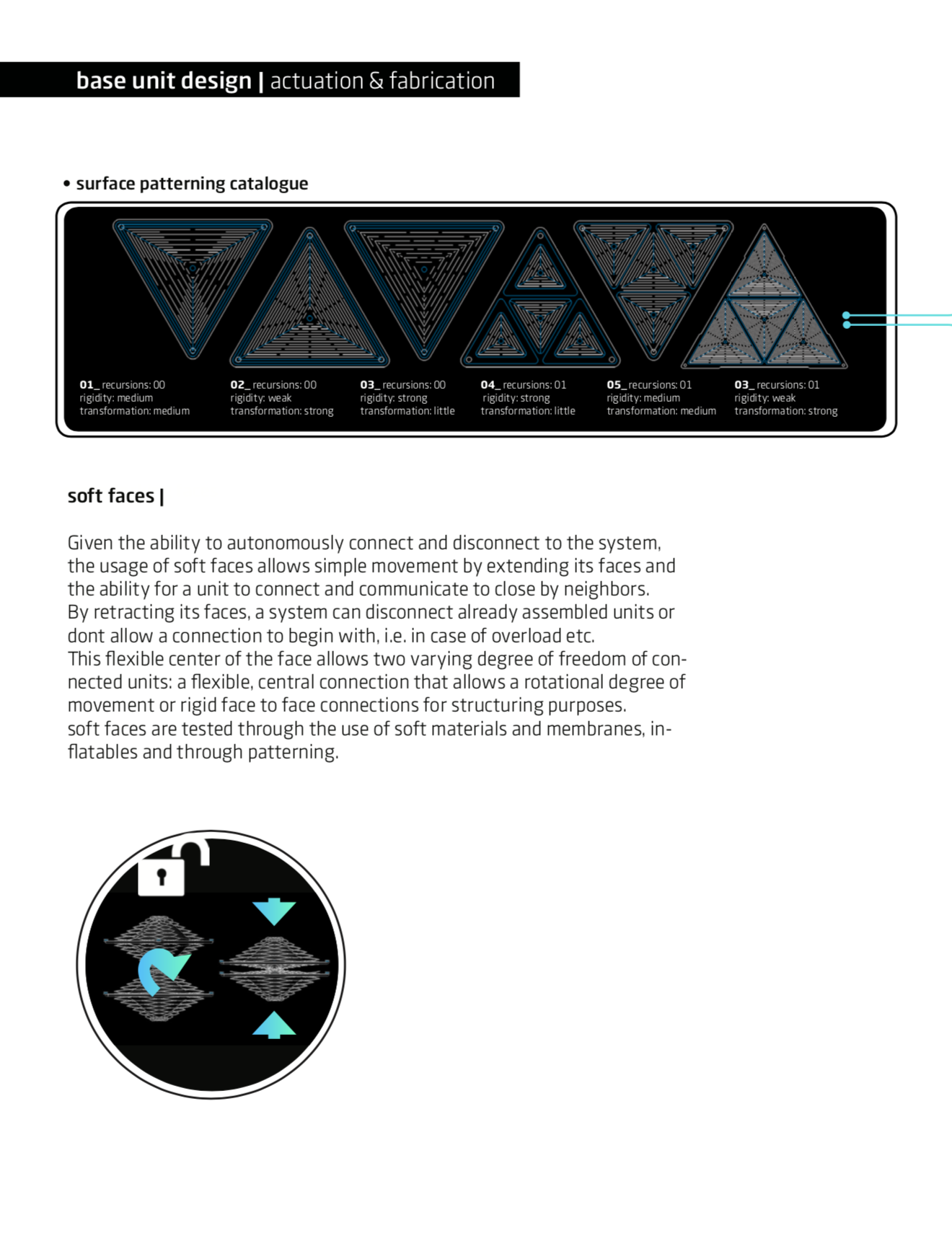
Bart//Bratkesoft faces |
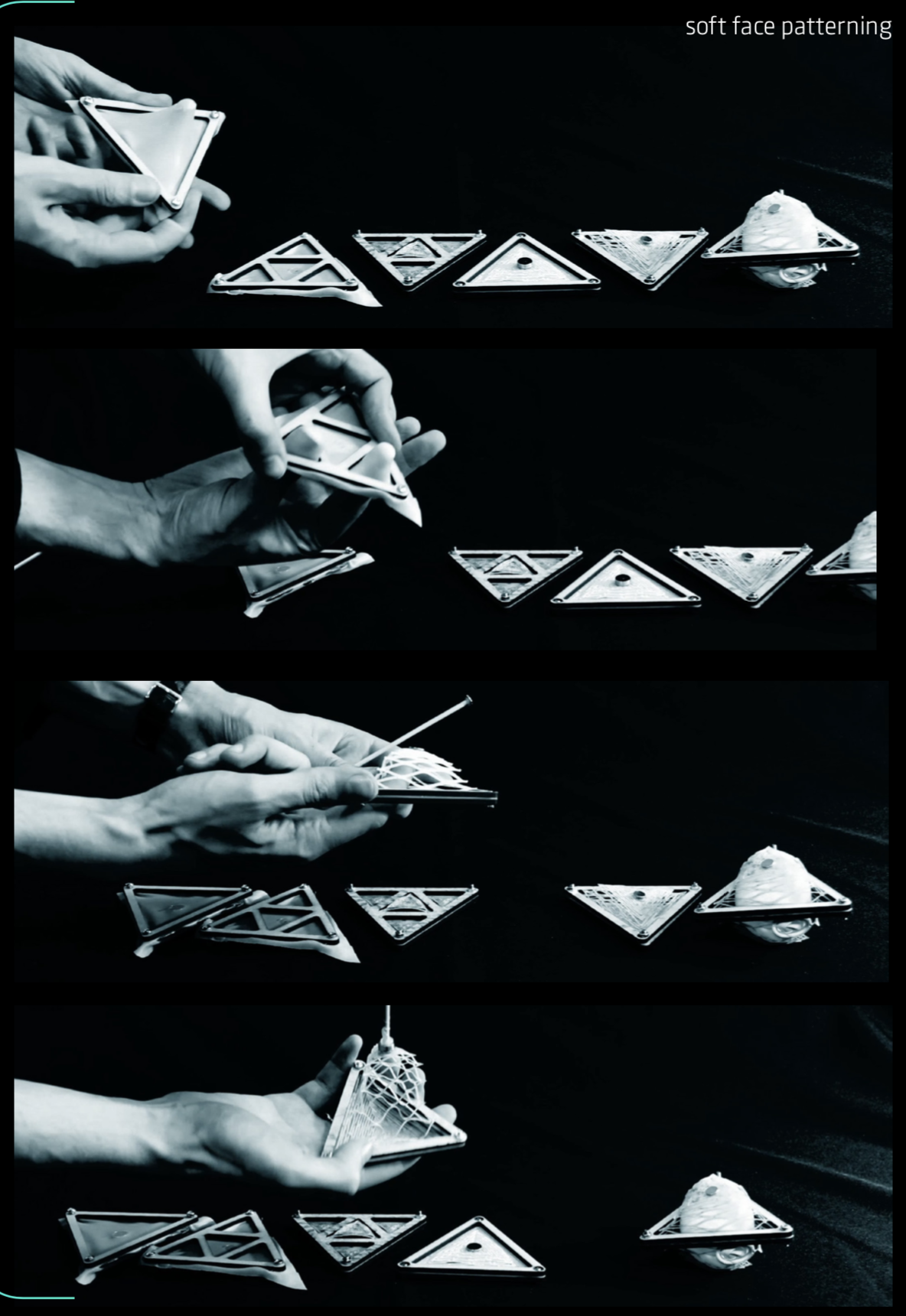
Given the ability to autonomously connect and disconnect to the system, the usage of soft faces allows simple movement by extending its faces and the ability for a unit to connect and communicate to close by neighbors. By retracting its faces, a system can disconnect already assembled units or dont allow a connection to begin with, i.e. in case of overload etc.
This flexible center of the face allows two varying degree of freedom of con- nected units: a flexible, central connection that allows a rotational degree of movement or rigid face to face connections for structuring purposes. soft faces are tested through the use of soft materials and membranes, in- flatables and through patterning.




unit to unit interface |
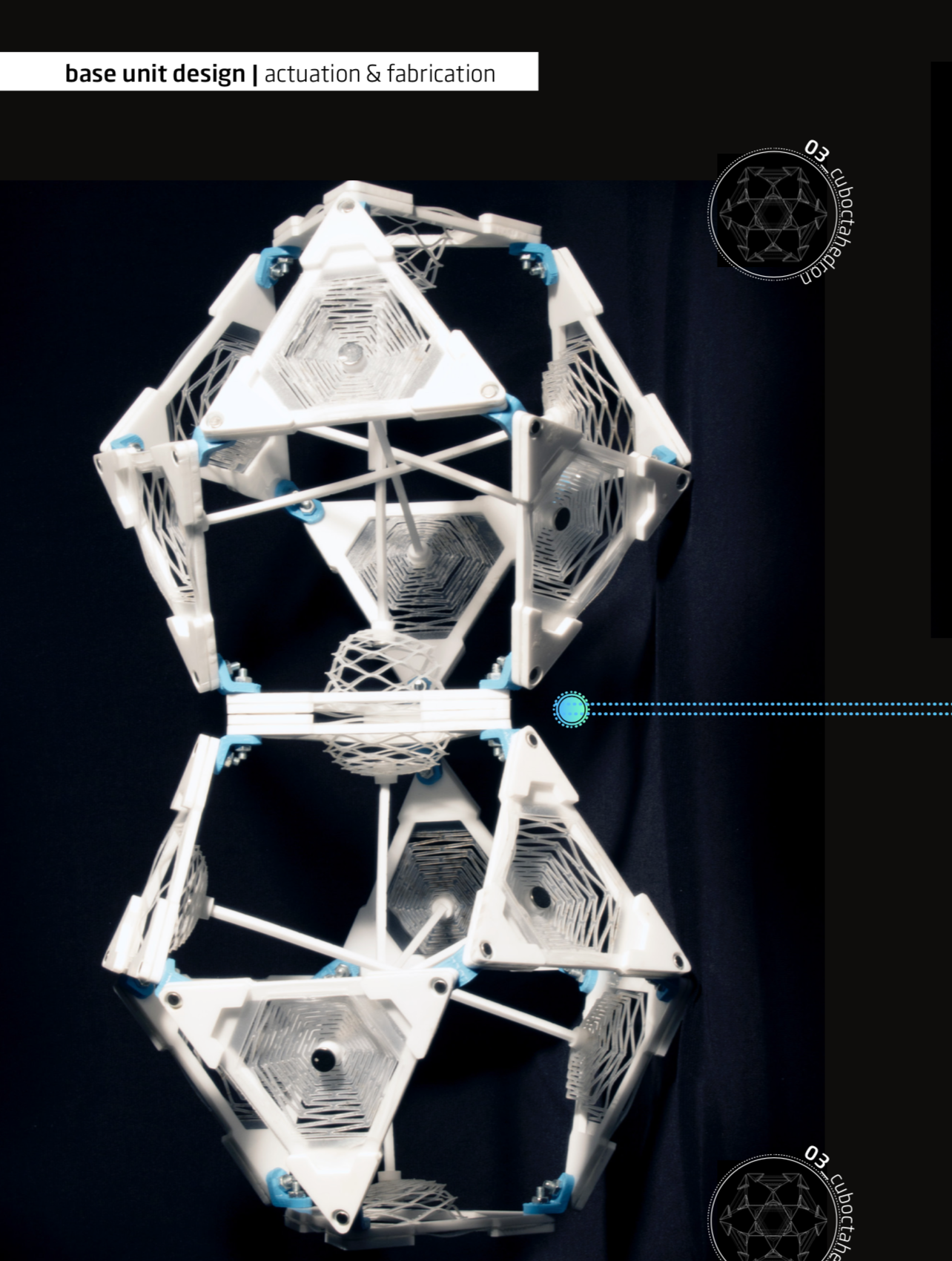
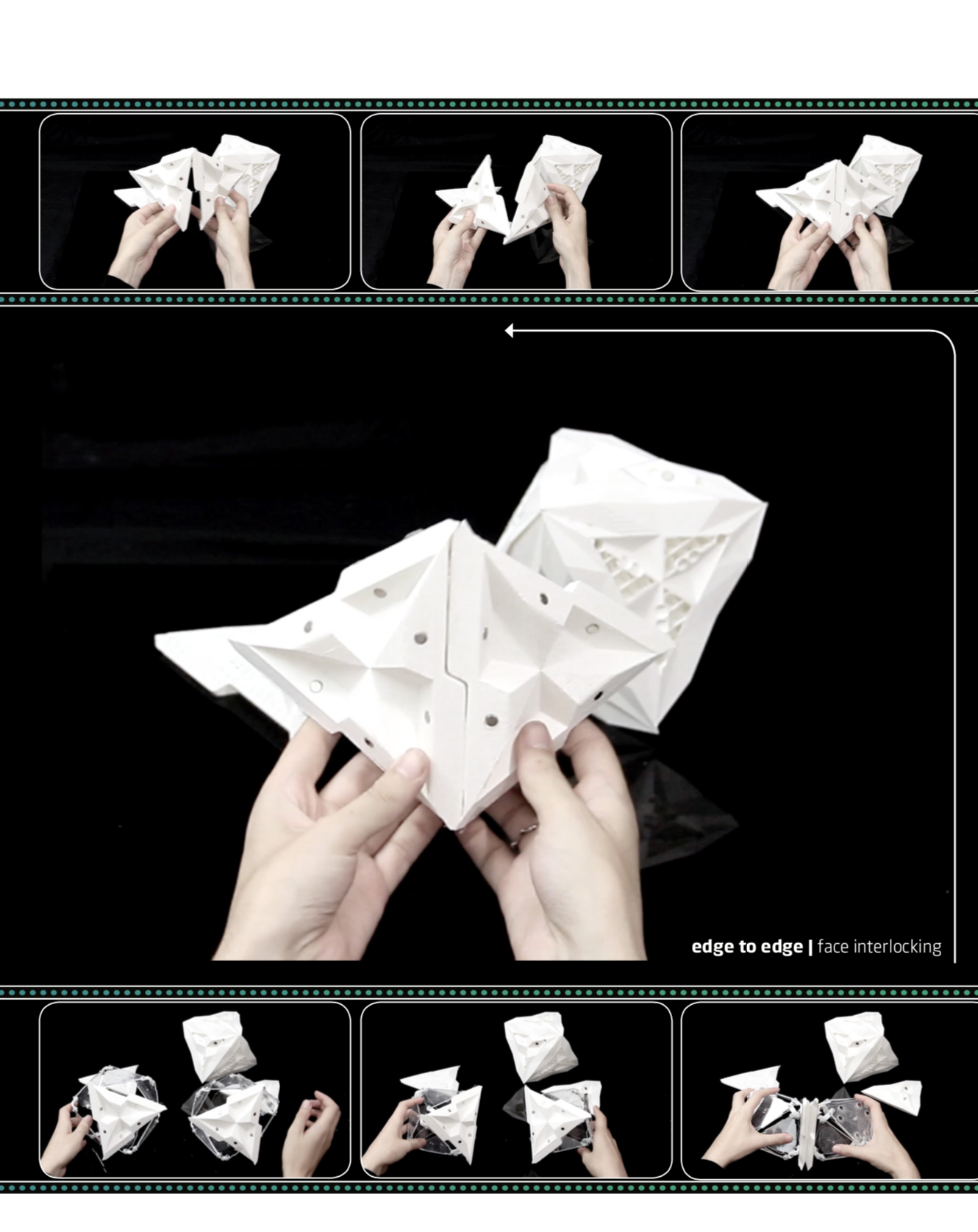
Looking for a plug’n’play mechanism to connect multiple units, the units faces serve as interface with structural function. All flat-faced experiments with magnets proved strong in direct horizon- tal contact but break under shearing force, esp. while lifting and cantilevering.
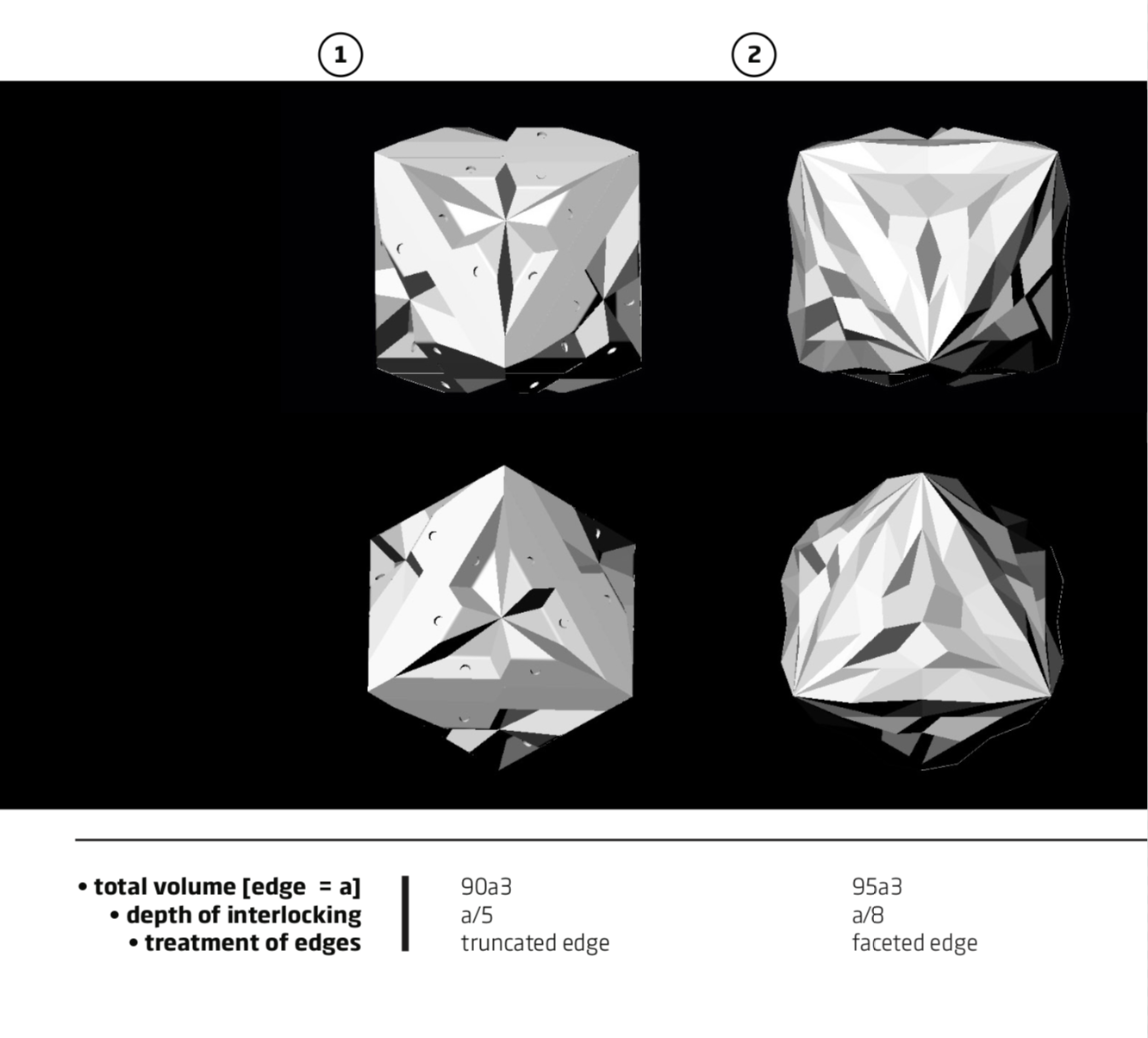
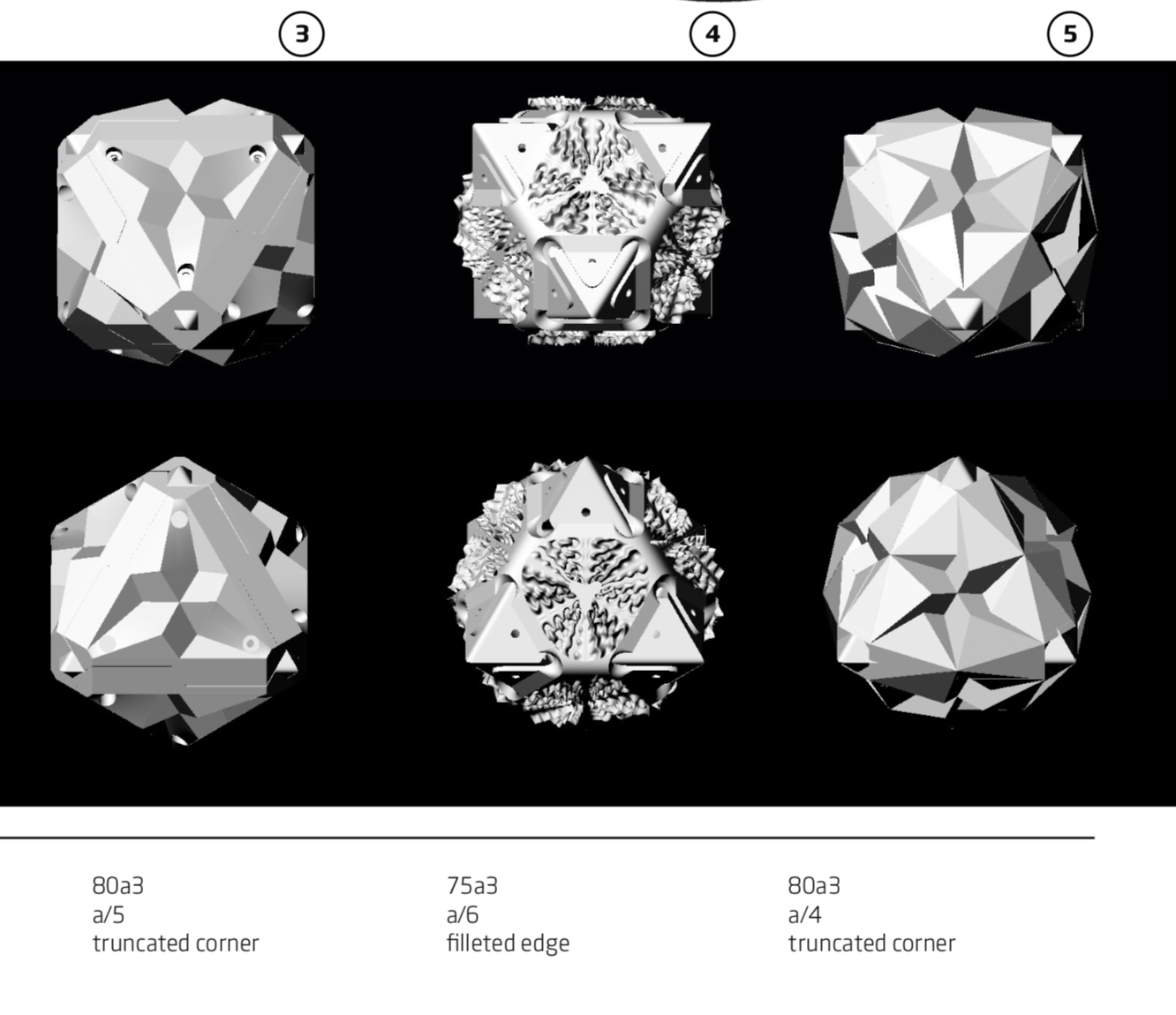
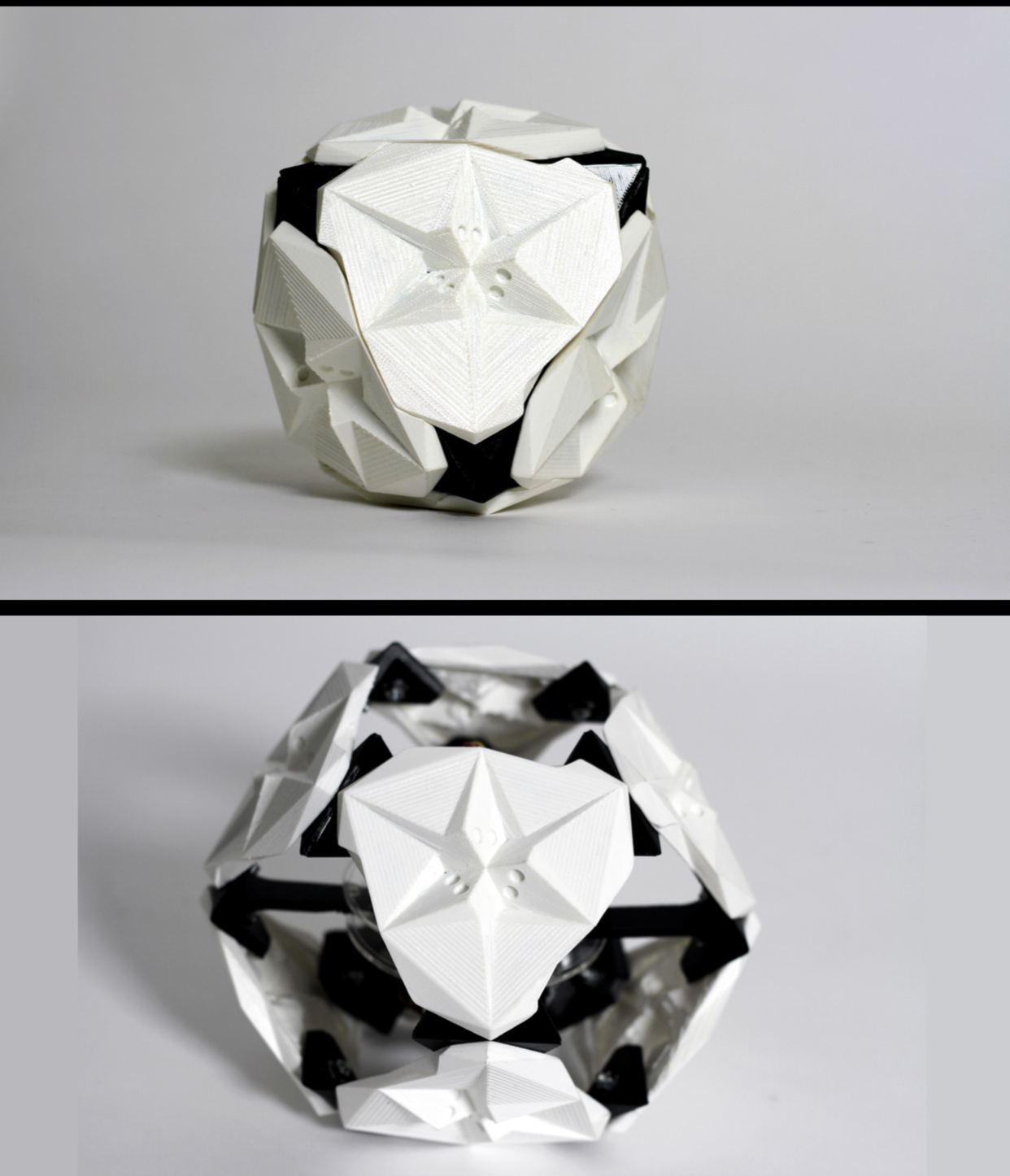
Positive-negative shapes applied to all faces work interlocking geometry, hindering shearing movement by strongly interweave two units and their connecting forces. The principle of interlocking is not only used from unit to unit but also from face to face within a unit for a more stable structure in closed state.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.