 Bart//Bratke
Bart//Bratke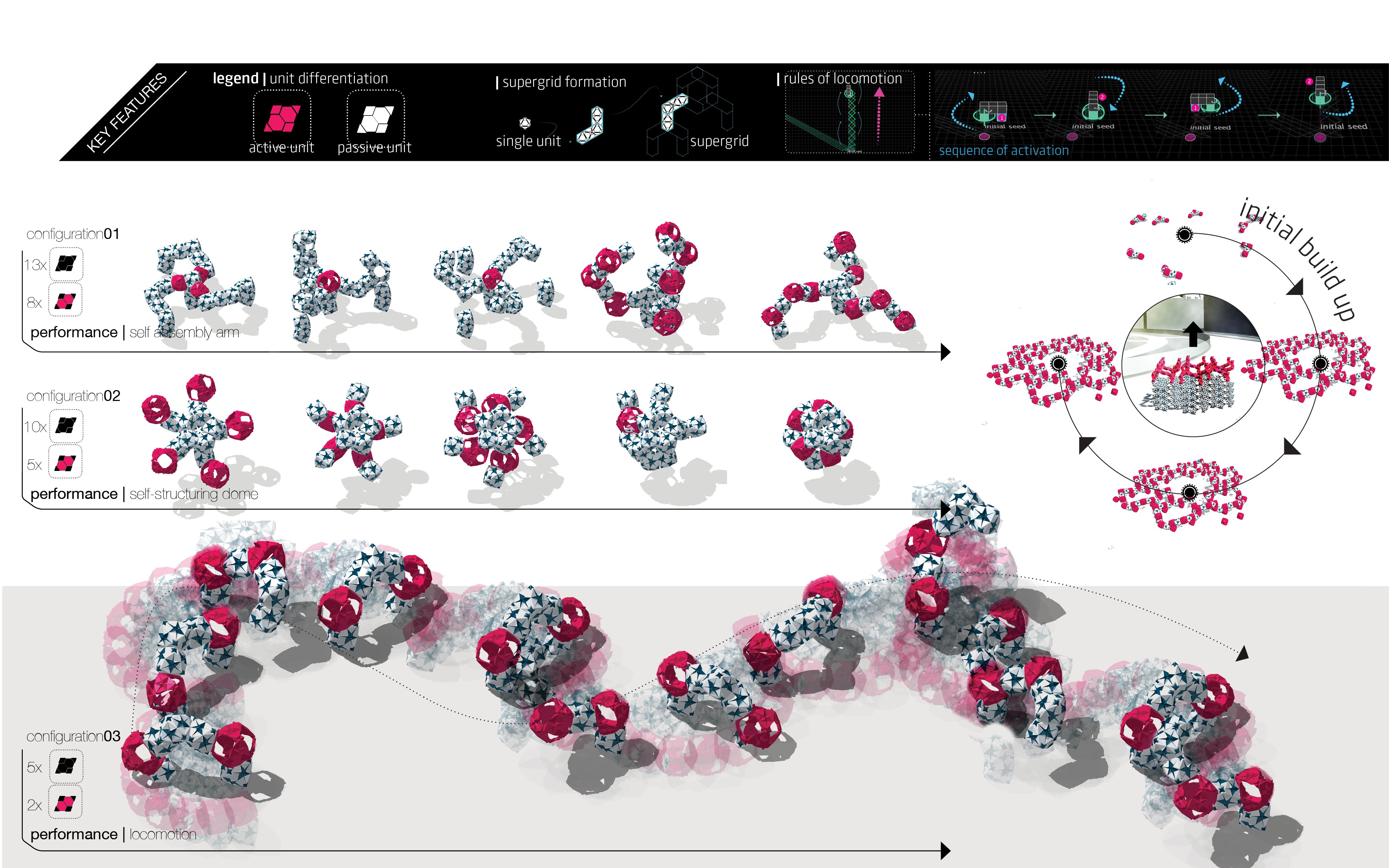
ecology of machines |
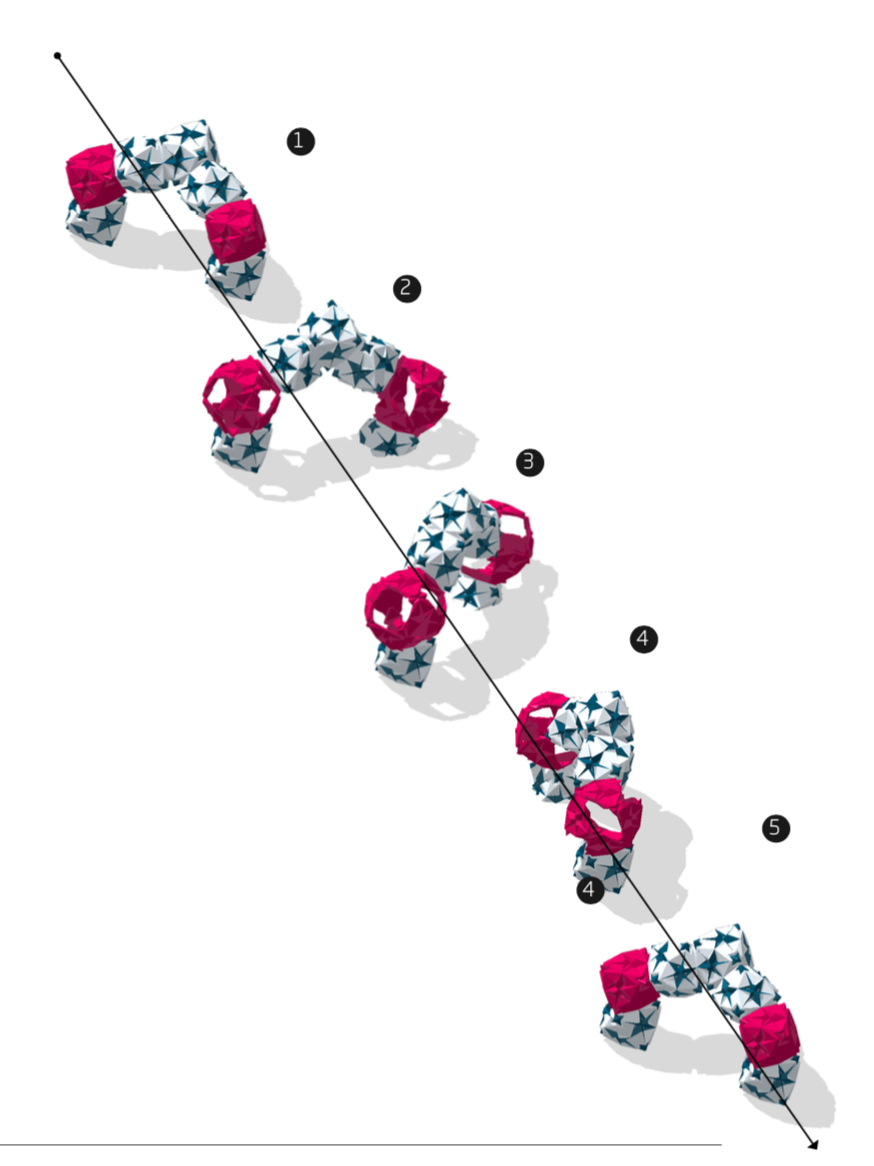
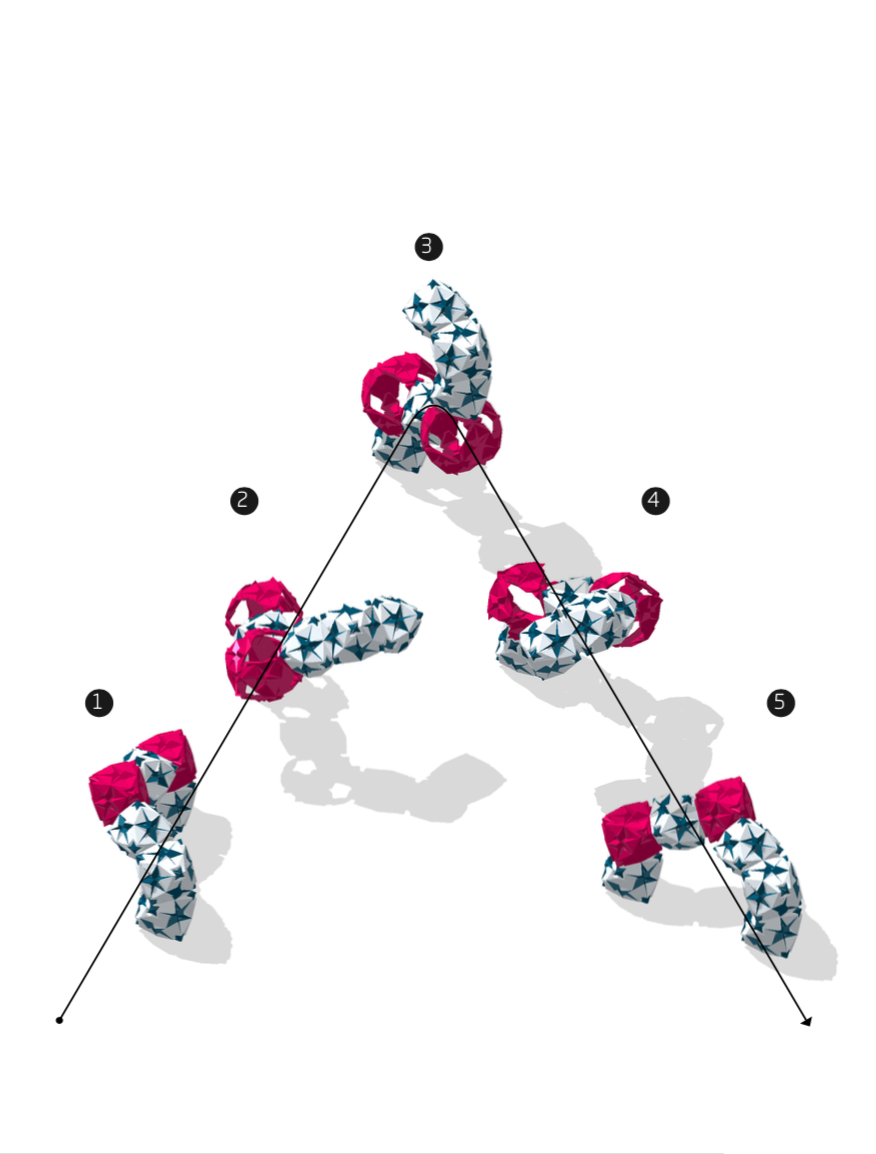
initial mobility studies where concerned with different combinations and aggretations of units behave different, how multiple units can take collective decisions and how their flexibility and range of move- ments increases in an emergent way with the complexity of the body- plan.
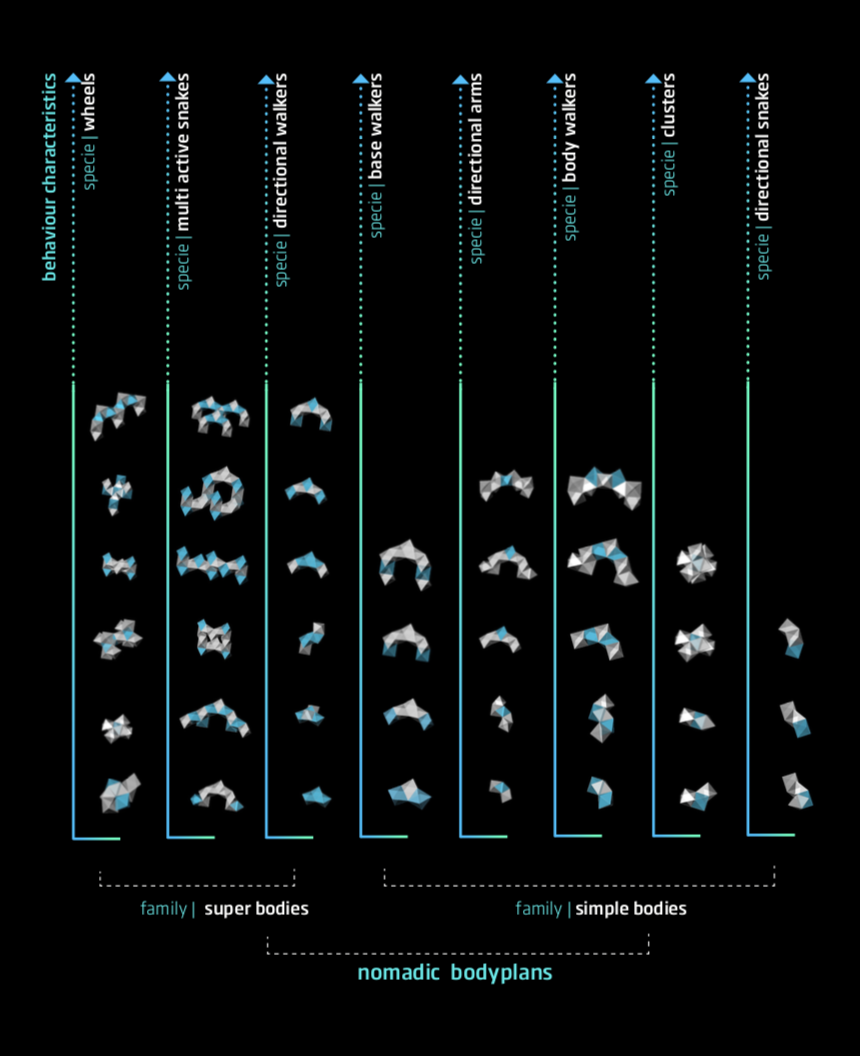
The notion of a bodyplans are pre-structured organizations that can be categorized in an ecology of machines with creature-like characteristics and highly specific behaviour. ‘Behaviour’ hereby is defined by position and amount of active units and their combination with passive neighbors.
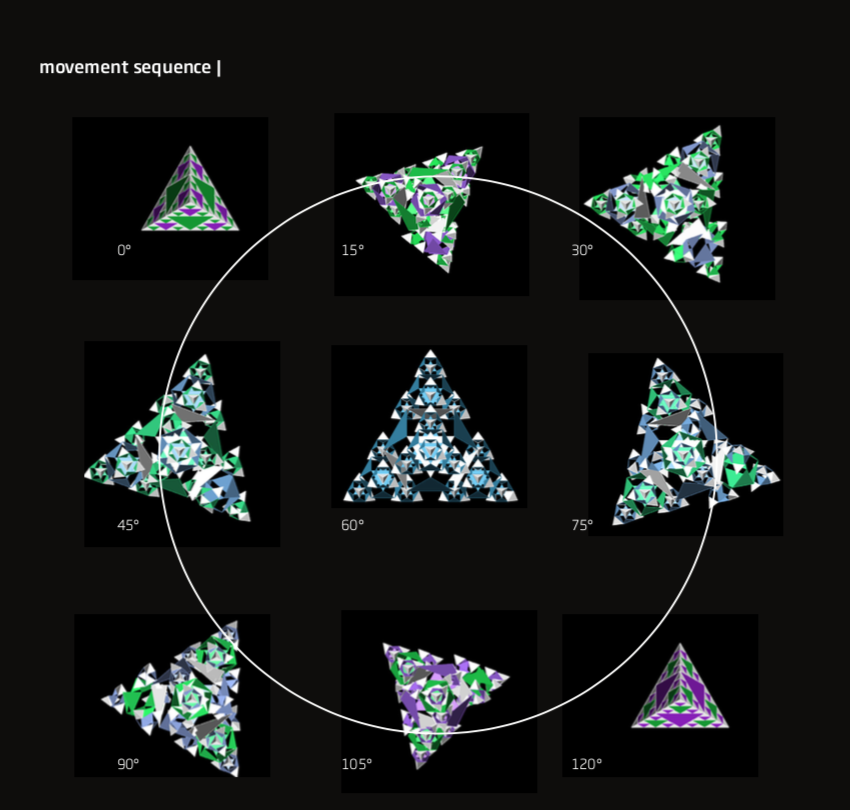
Within the same physical bodyplan, different sequence of activation define dif- ferents sets of behaviours allowing various actions and features for movement and assembly.
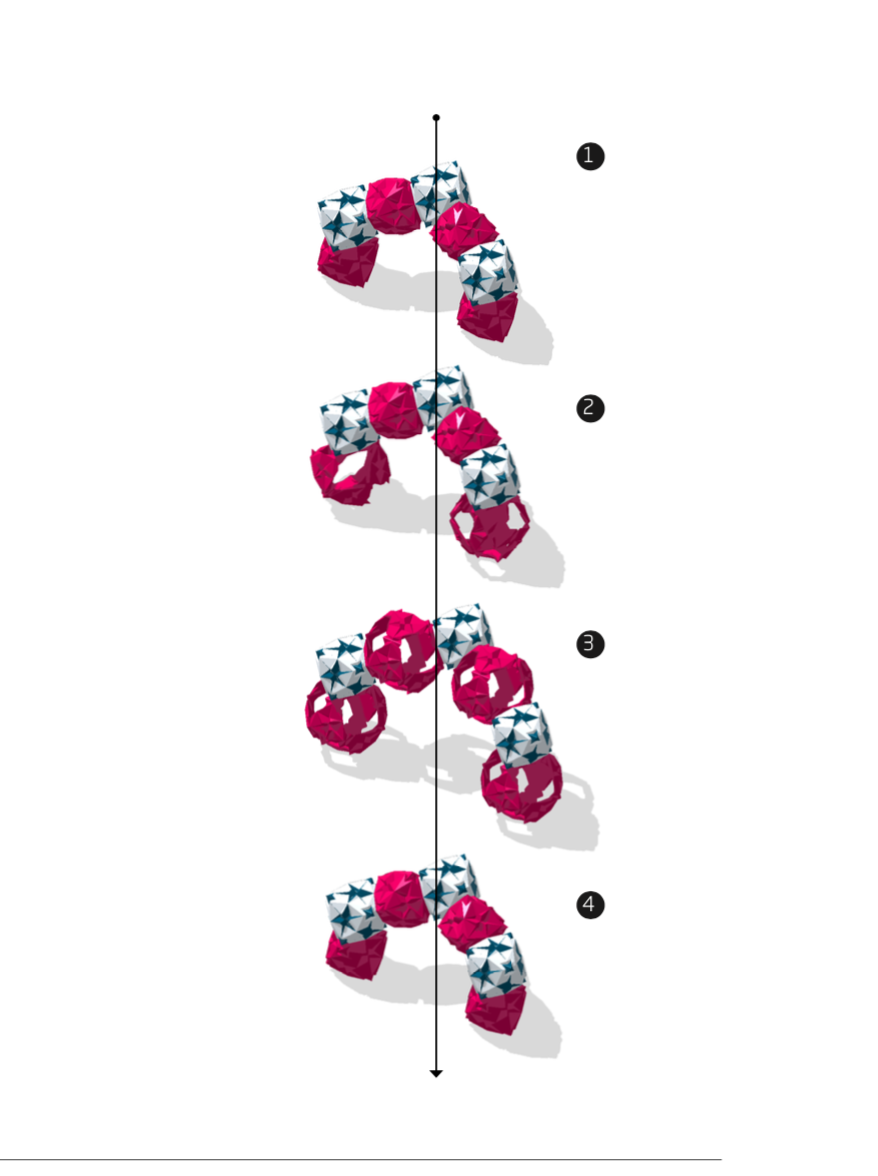
face to face relations |
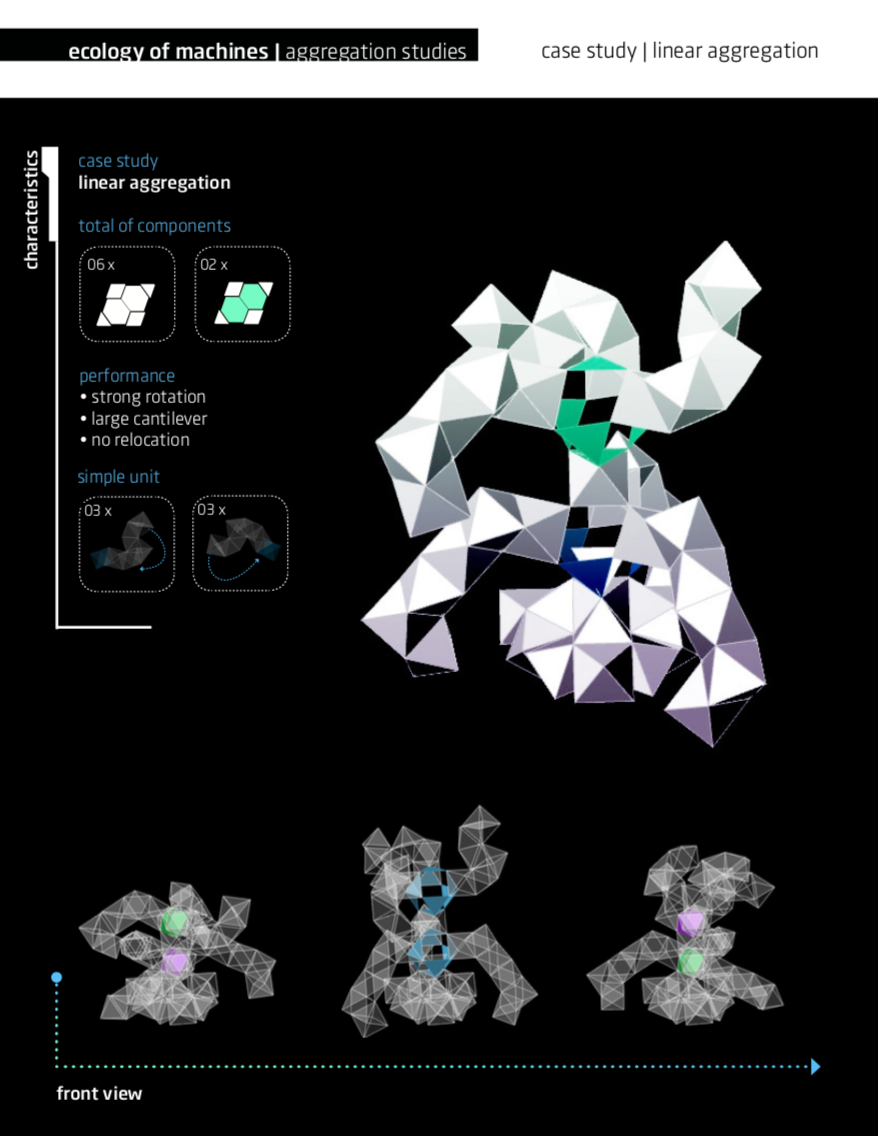
A series of different relational changes within one unit, from mere linear translating of opposing faces to relocation and rotation of di- agonal faces,drastically changes the units potential search space to
aggregate, allowing new connections. Meaning a local transformation reconfigures the entire existing global system it is connected to in different variations, depending on its connection to neighboring units.





Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.