 Bart//Bratke
Bart//Bratke

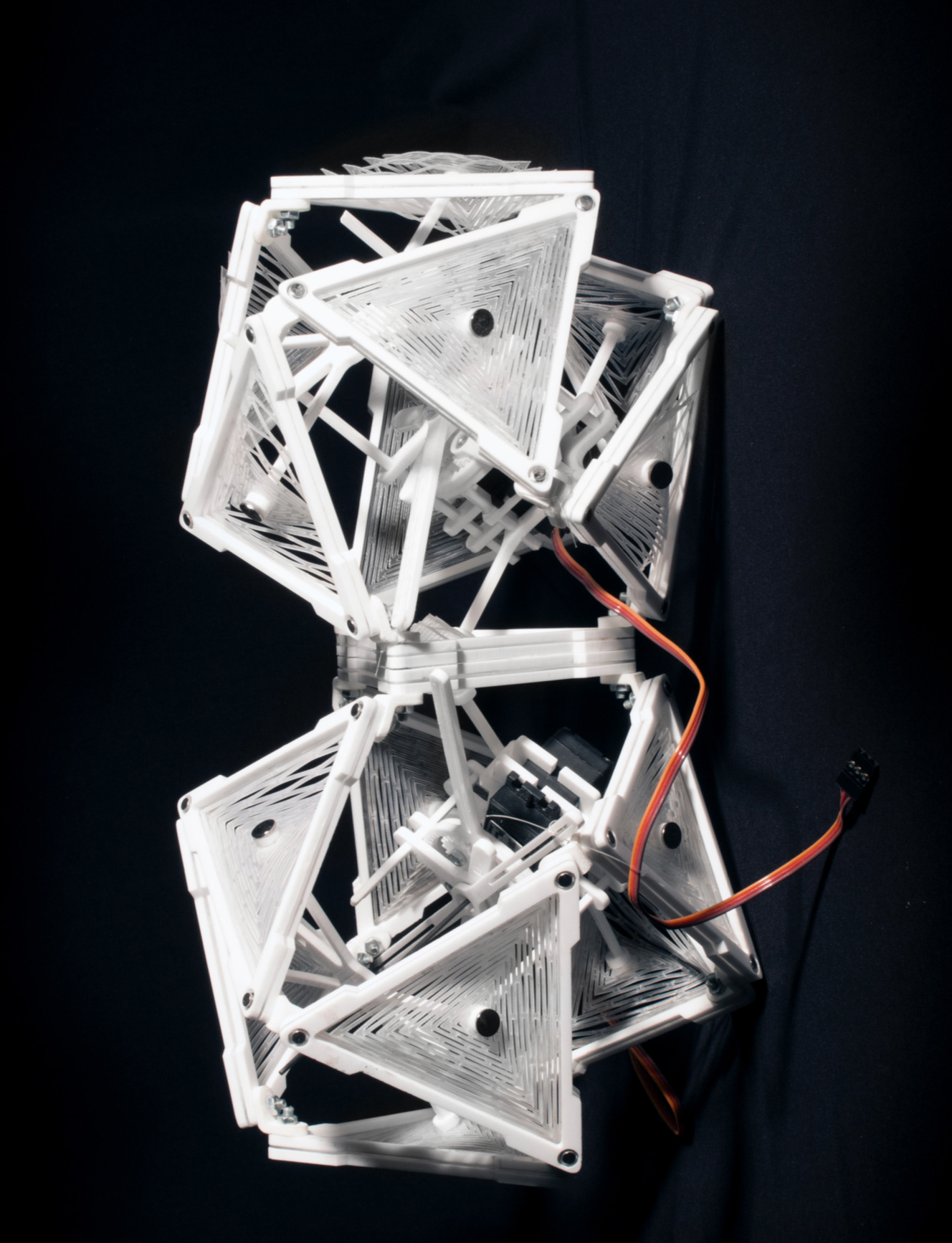
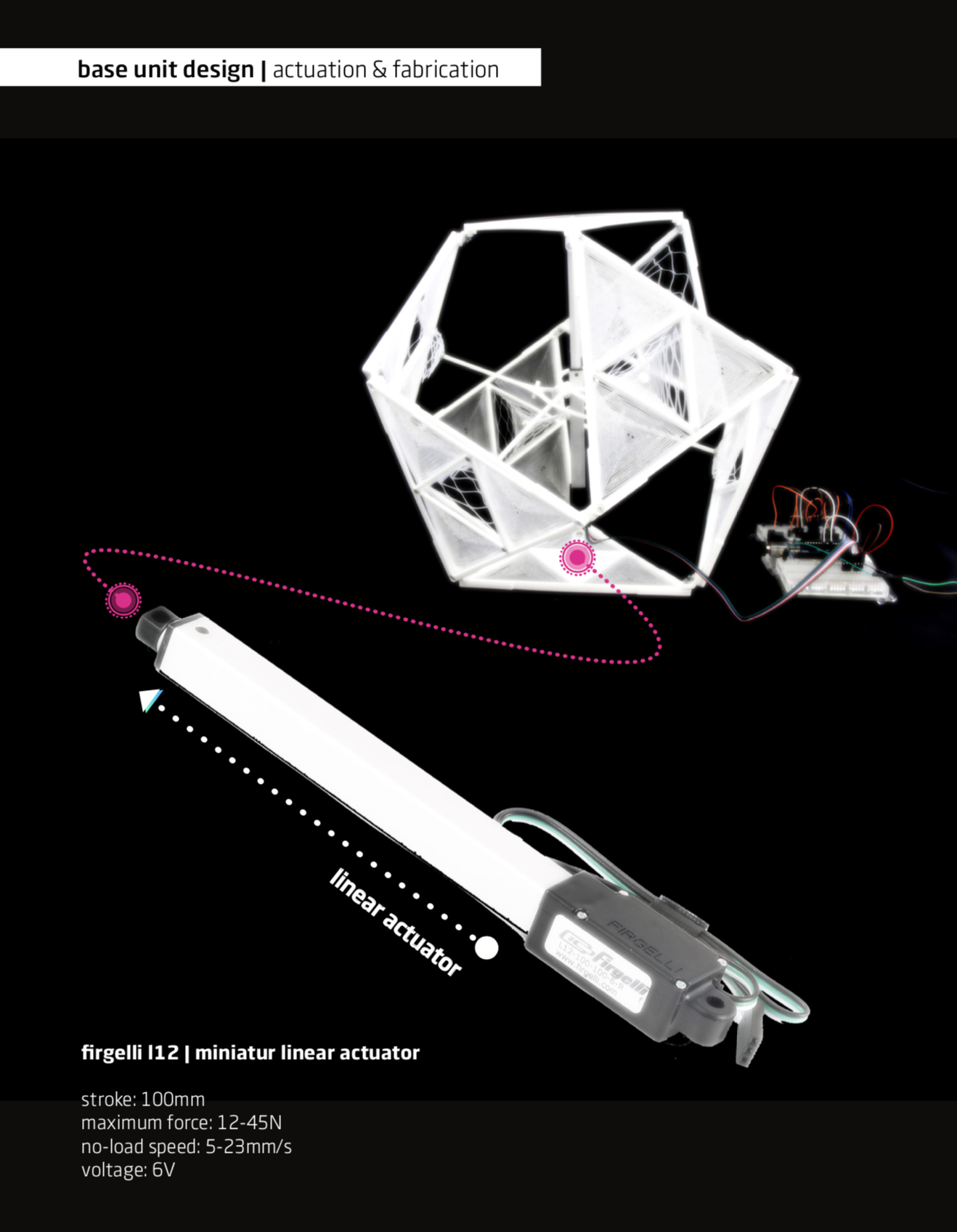
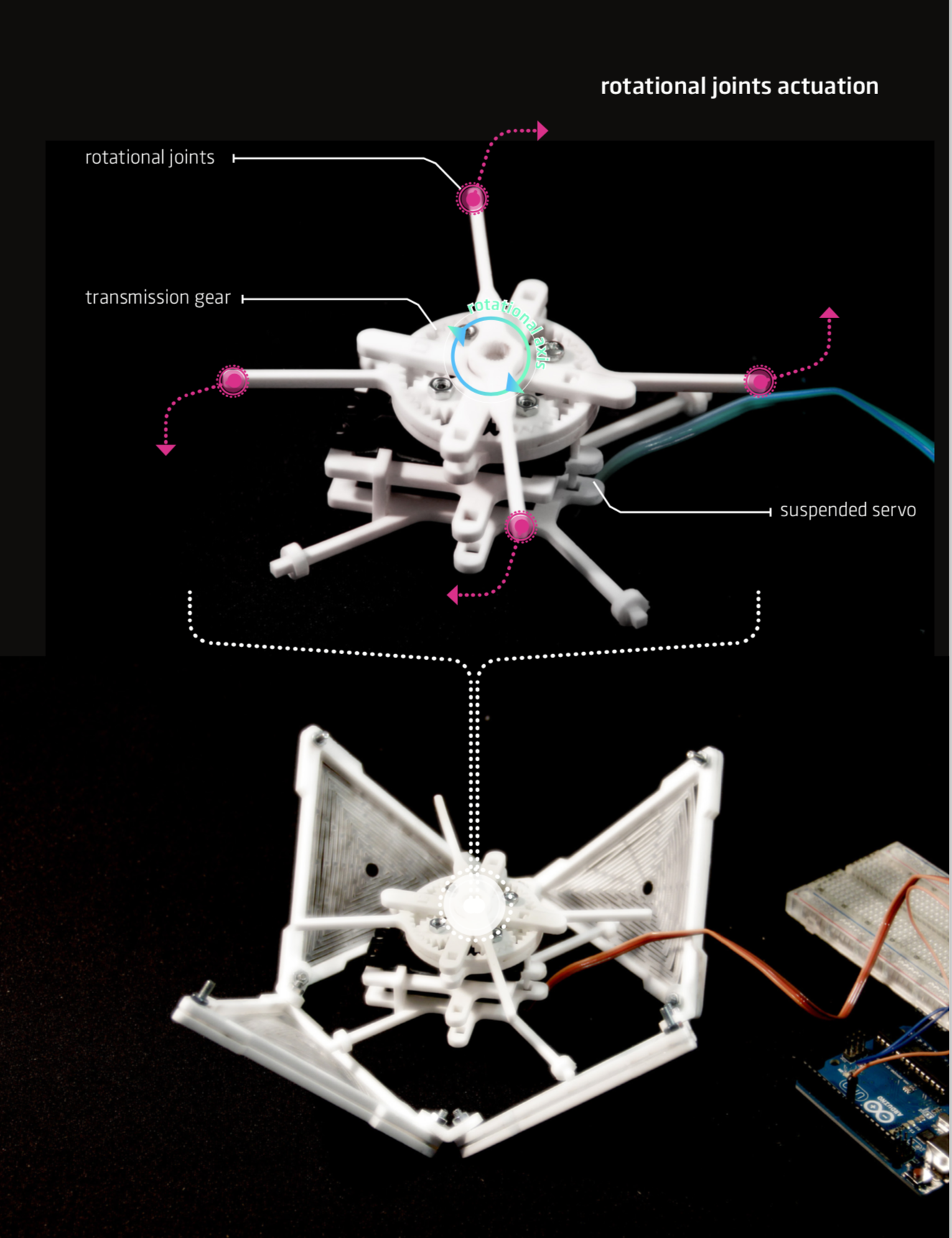
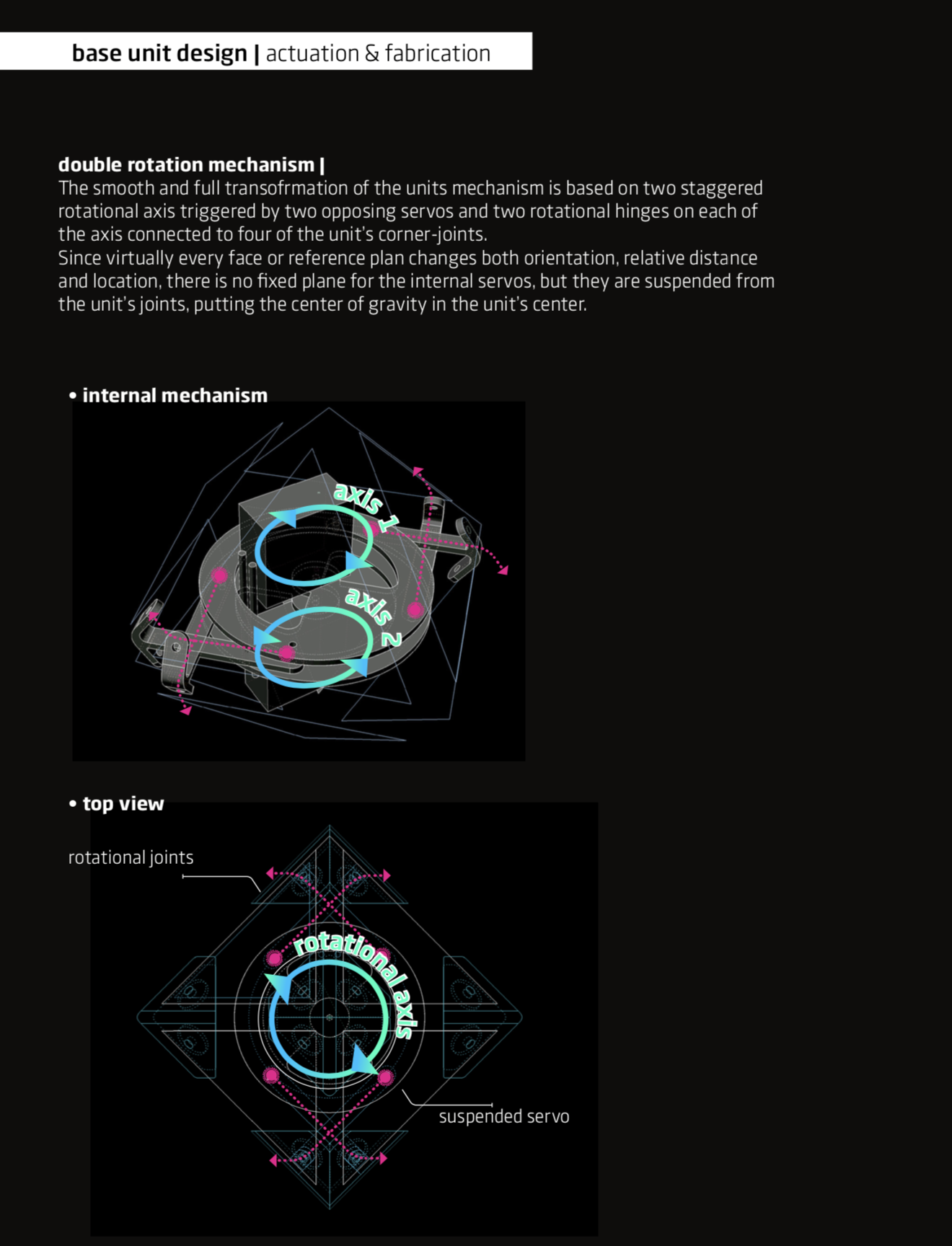
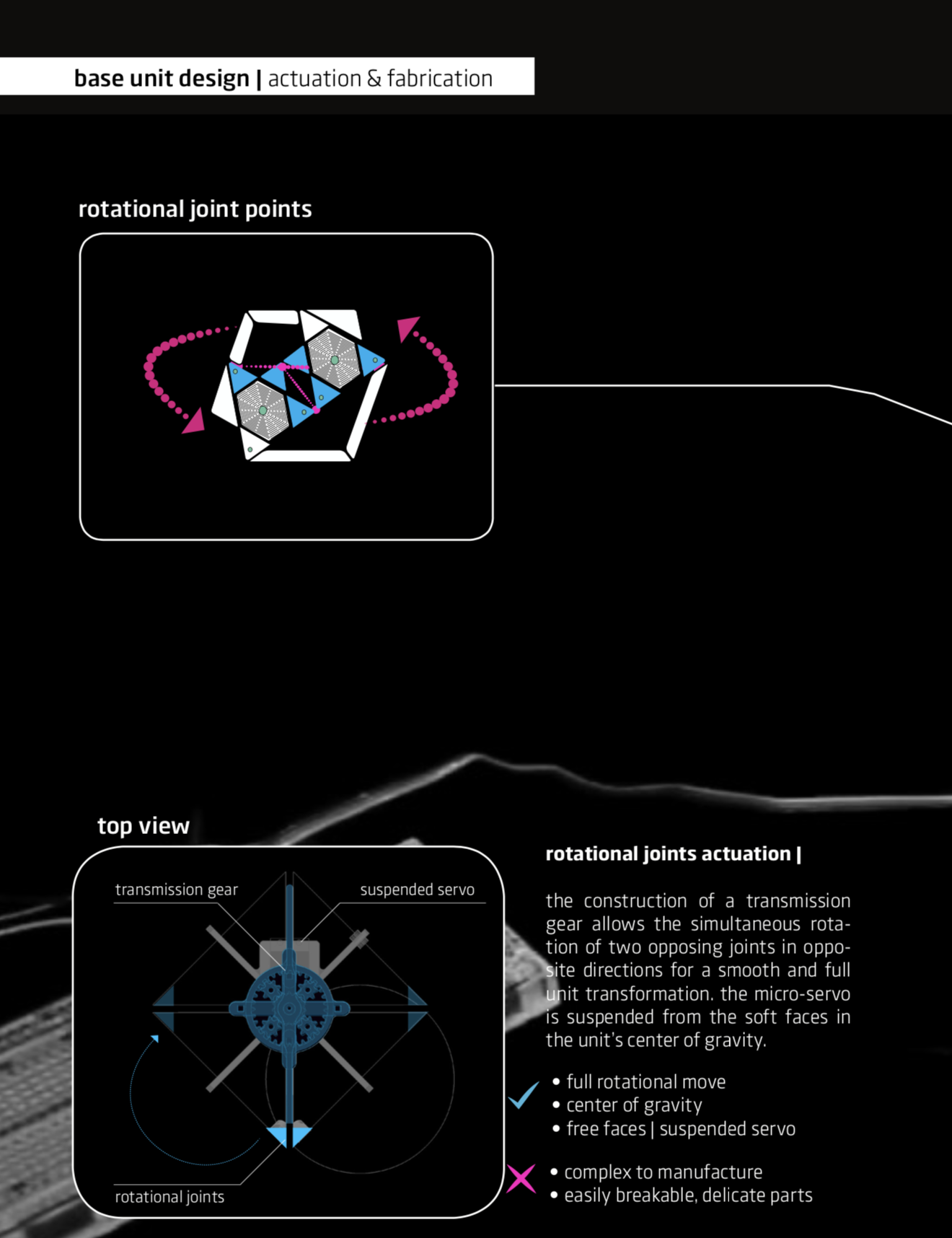
In order to actuate the unit and enable it to act autonomous, different approaches from introduction of flexible unit to unit interfaces to internal mechanics and controls were explored.
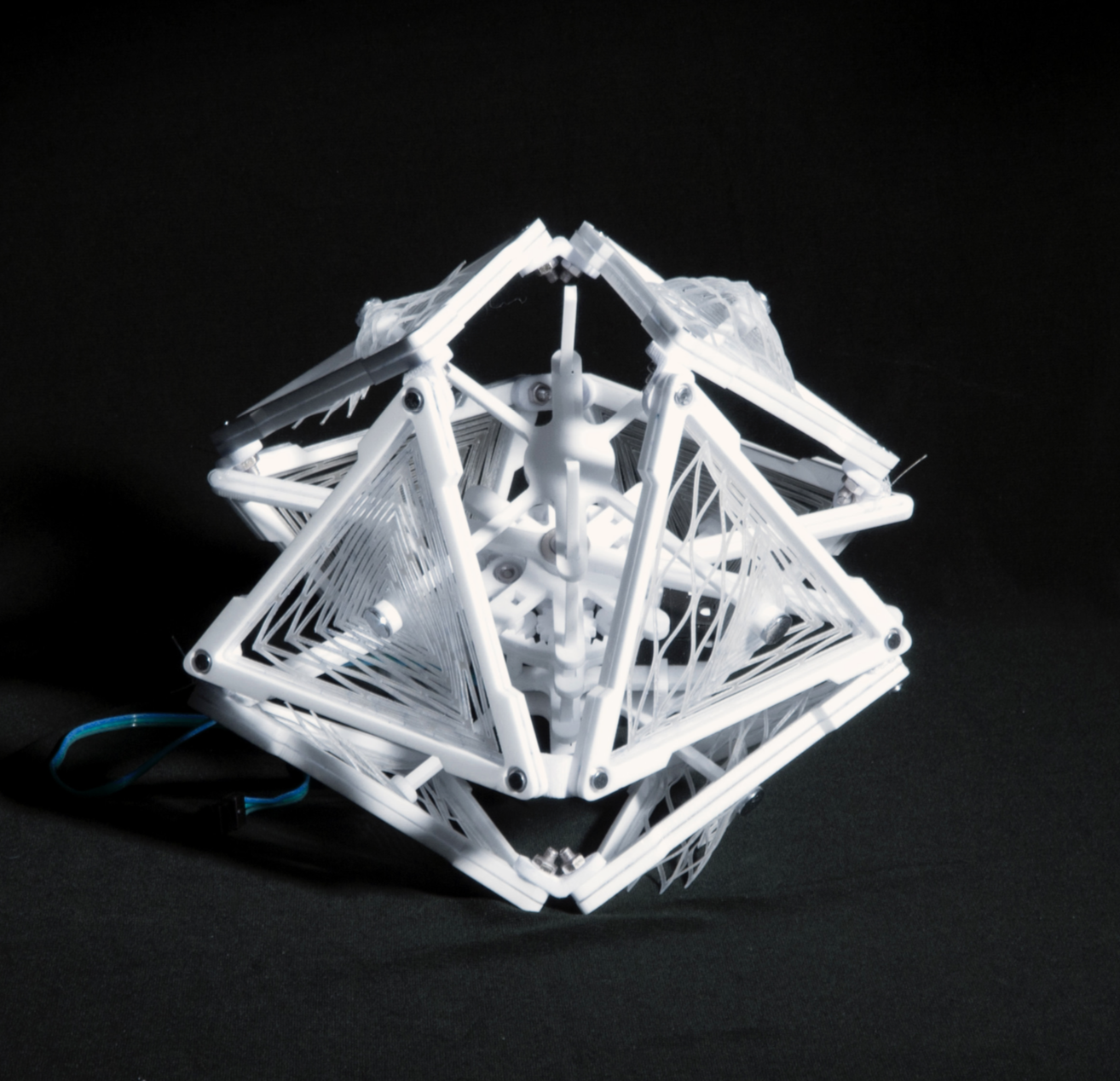
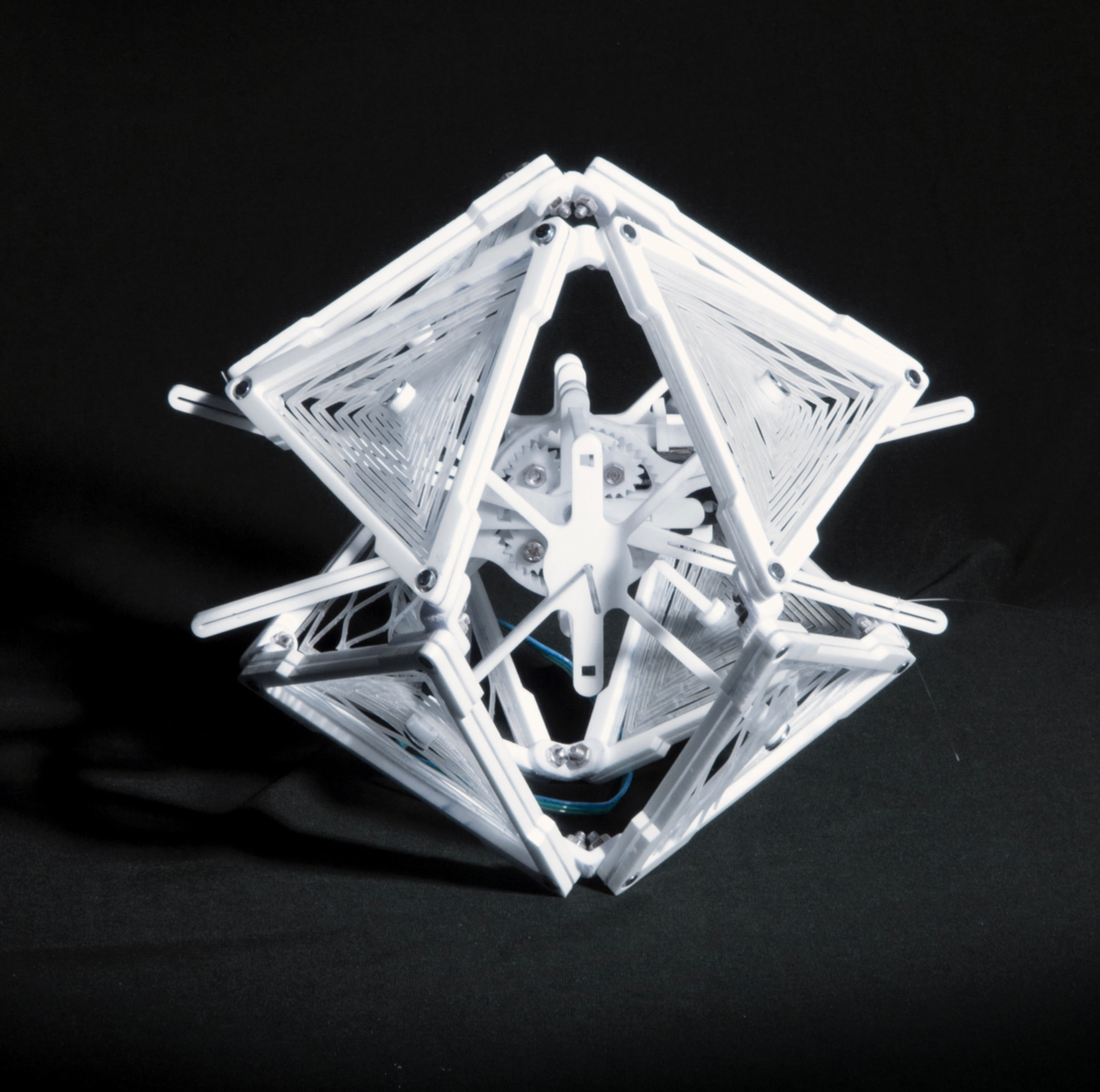
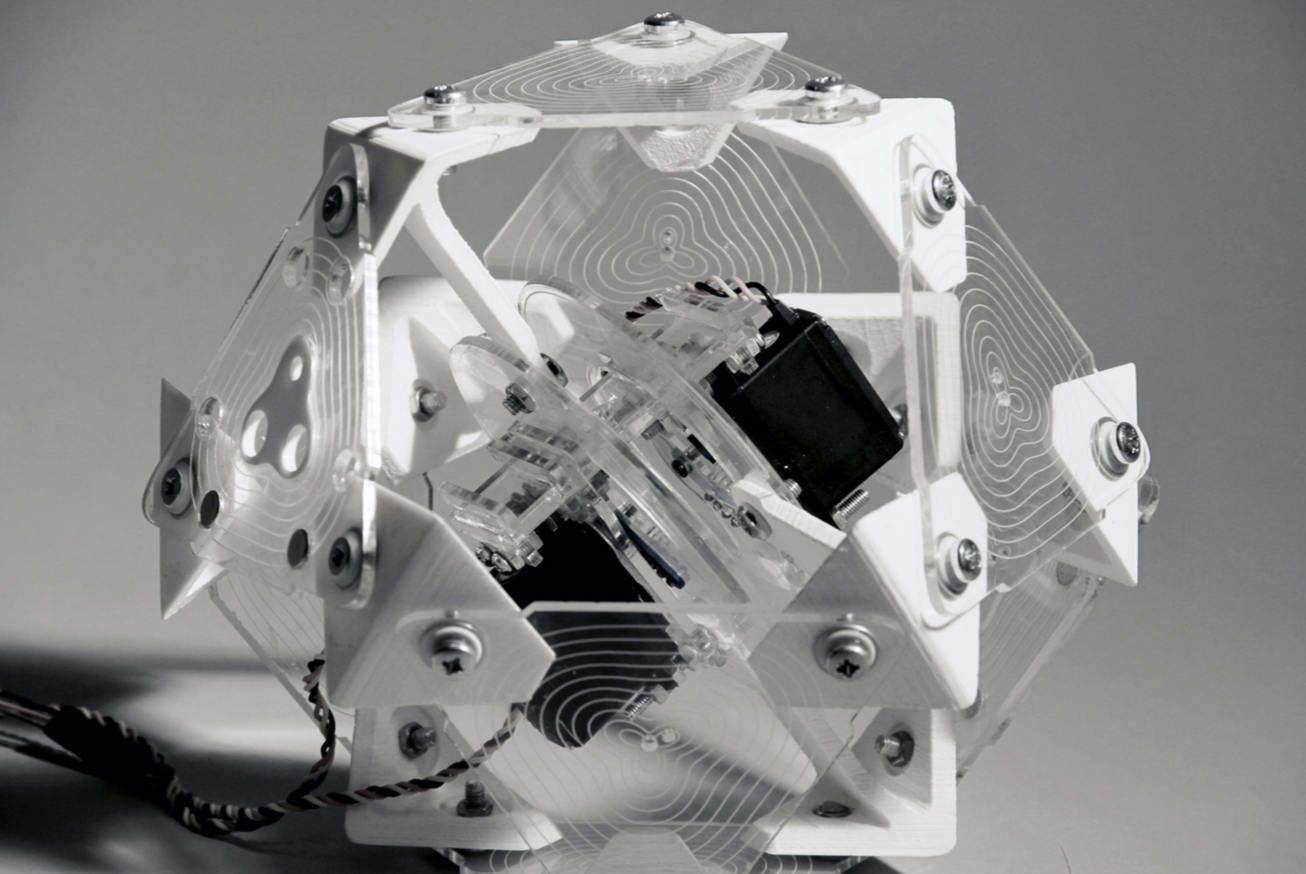
The main unit has several design features embedded that enable it to act autonomously and perform in a plug’n’play manner, The external shell follows two main function of Unit-to-Unit Interface: Construction & Communication between units, Construction is concerned with Connecting & Disconnecting and Interlocking between a Unit’s faces, Communication with Body-Plan Awareness and sequencing.
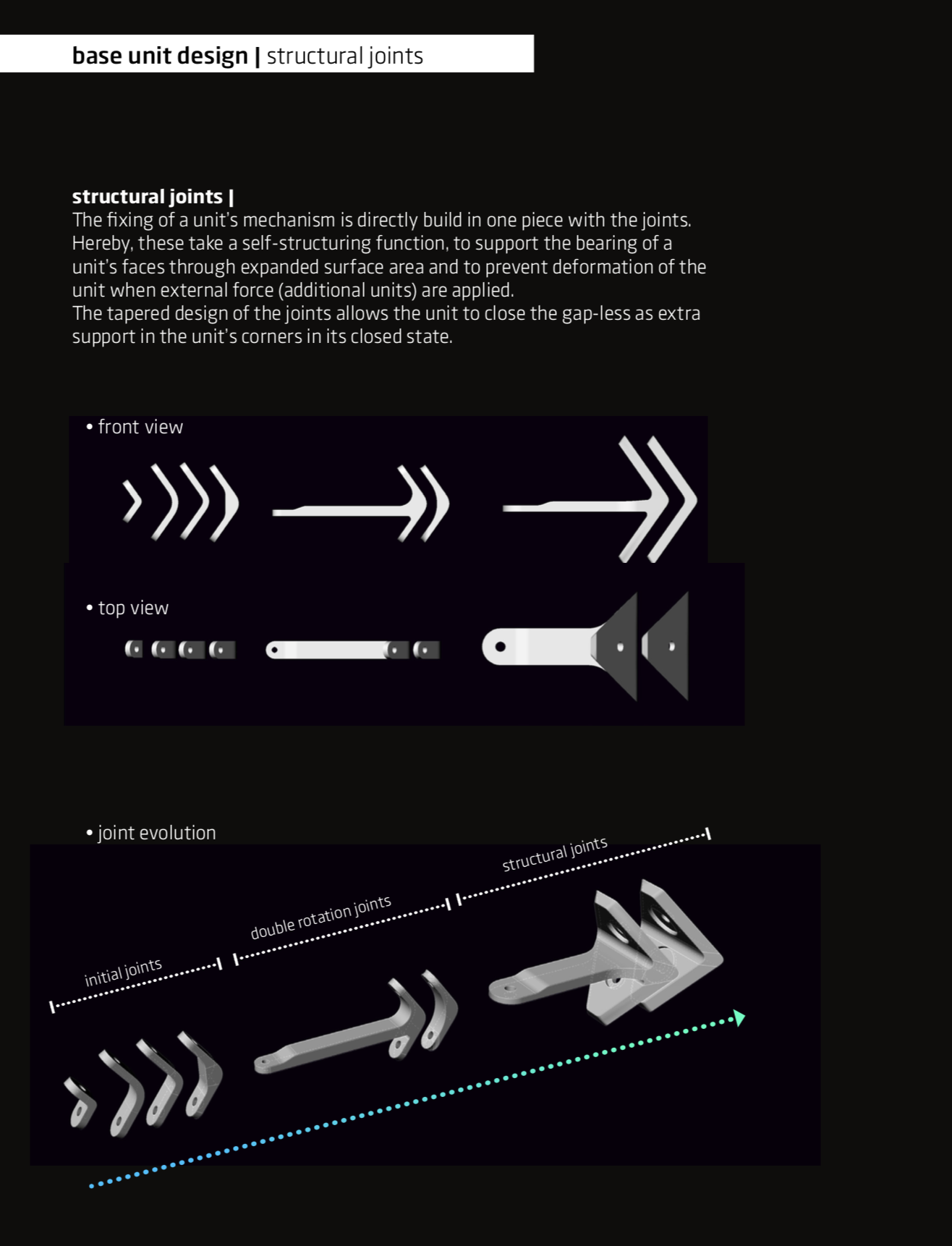
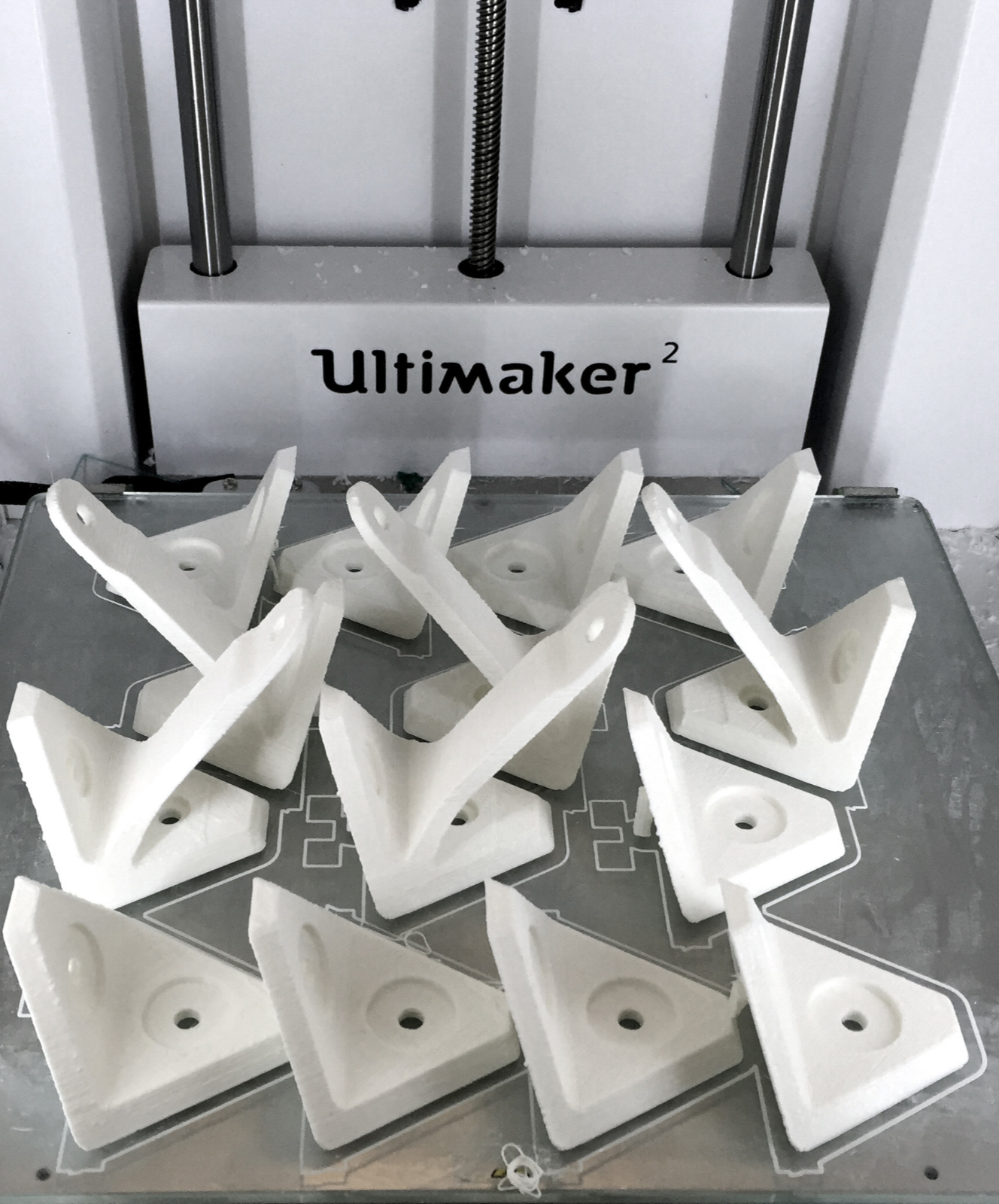
A single unit can be fabricated with simple diy components all parts except the electronics can be printed within 12 and assembled within 2 hours with any desktop 3d printer.




Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.