 Itamar Eliakim
Itamar EliakimMechanical
Getting the RC Car ready to go after ~10 years, engine compression seems to be good, carburetor is completely cleaned. Found out the car didn’t start because of a small pin between the crankshaft and the backplate, when pulling the cord, it rotated only the shaft at the backplate. Instead of ordering a new spring/pull mechanism (didn’t have the patience) just put some Teflon tape between the crankshaft and the small pin, it worked perfectly.

Next, designing the parts, I’ve separated this to three major units:
Rear Unit: Webcam, Lights(Later).
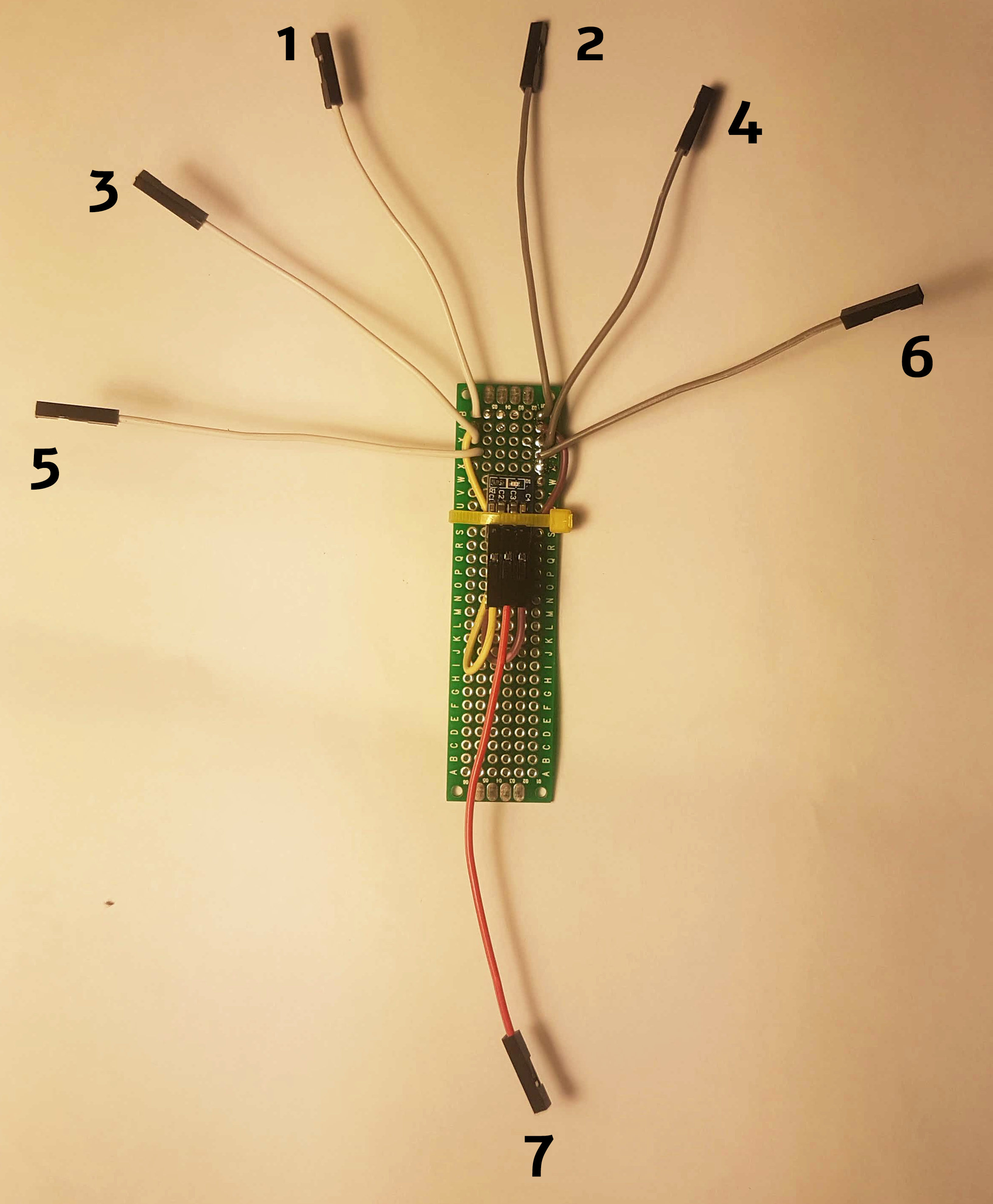
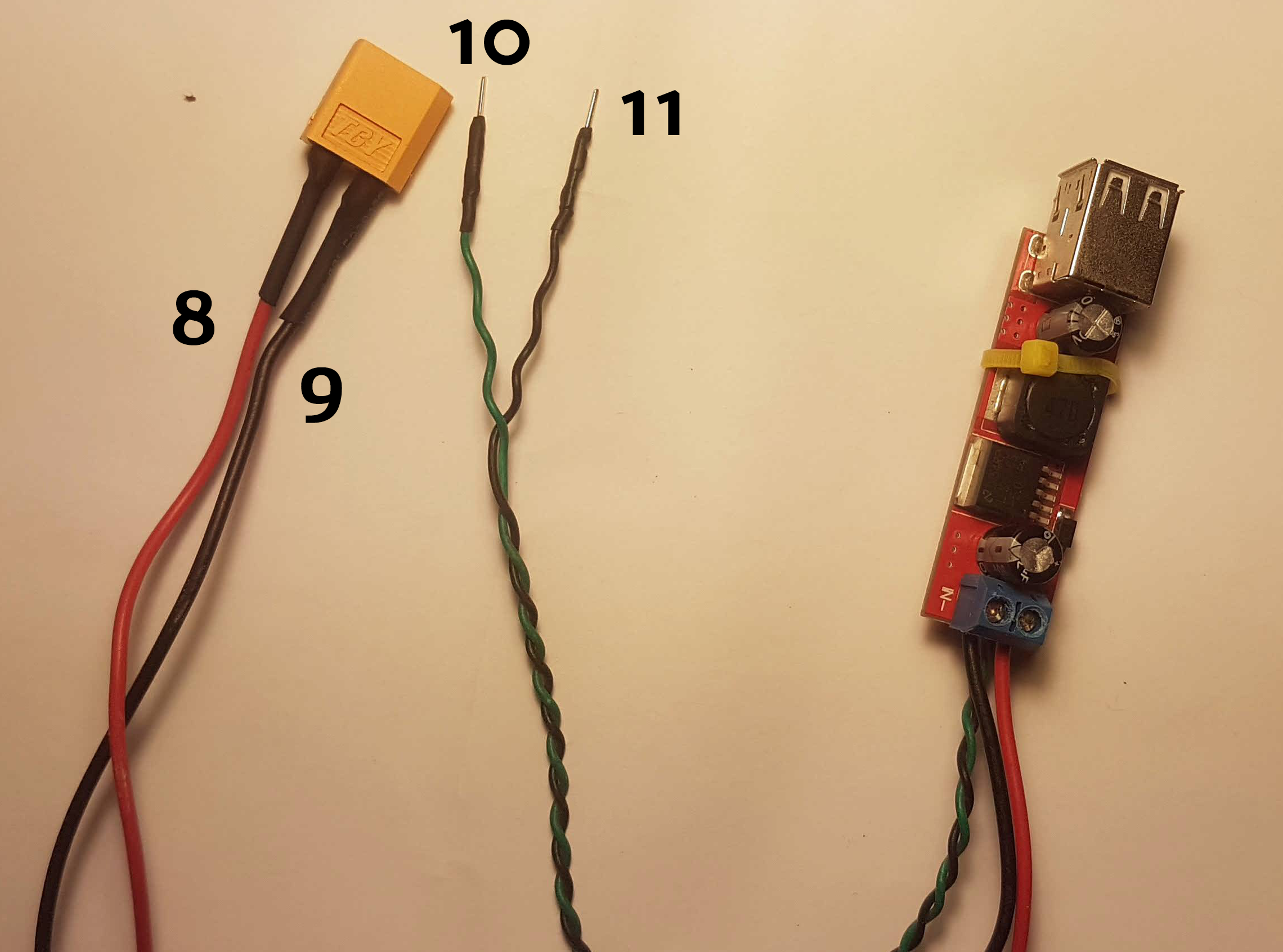
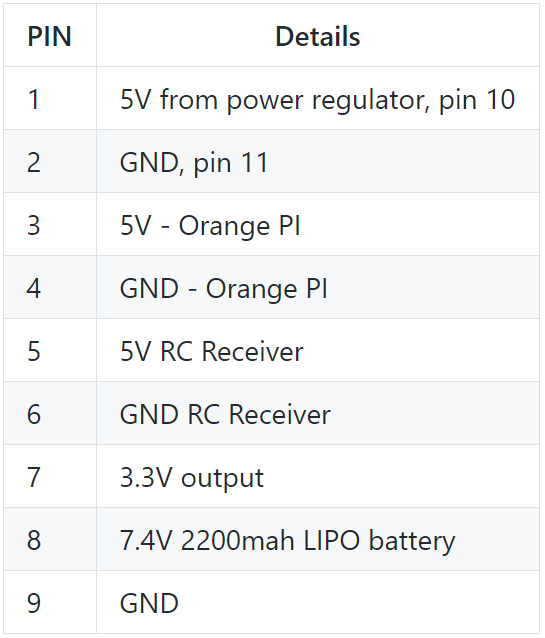
Center Unit: Power Regulators (5V and 3.3V), Power Distribution Board, RC Receiver.
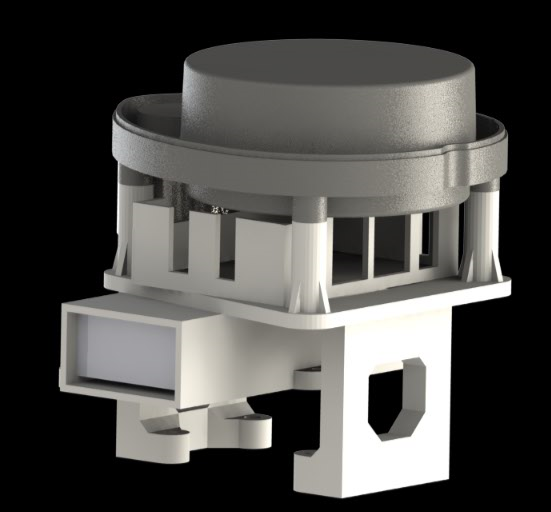
Front Unit: Battery, XV11 Lidar, Orange Pi.
Hardware
Rear Unit: 1x Logitech C170

Center Unit:
Main power supply – LIPO 7.4 2200mah, several components at this design works at 5V/3.3, will use two different regulators:
1xLM2596 – 5V 3A Buck converter
1xAMS1117 – 3.3V 800mA Buck converter
Front Unit:
1x Orange Pi Lite(Allwinner H3)
1x XV11 Neato Lidar
1x STM32F103C8

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.