 Alfonso Troya
Alfonso TroyaOk, so now the hardware is working and we have a lot to do, but in order to have a reference for comparing the output of the real sensors, we want to simulate them for getting the ideal output. In order to ease the use of the sensors and making the rest of the people to use it, we created a github repository where you can find all the instructions for running the simulation with the sensors (and with the real hardware too!). As we want to integrate them in ROS, it makes sense to also use for integrating all the simulation. Probably most of you already now it if you already worked with robots, but for those who don't here you can find an introduction to it. So let's begin!
Our first approximation: a simple cube
As our sensors are providing an absolute orientation, the easiest way to see the rotation, is using a simple cube. Inside of it, one of ours sensors is inside, so we are able to move the cube in the simulated world and see the output of our sensor:

Let's tell the cube to move and let's see what happens...
It is moving! So we can check the now the output of the IMcoder (can you see it there just in the middle of the cube?). And the output of the IMcoder looks fine too. There you can see the plot for the orientation of the sensor and also for the angular velocity. Now we can go one step further and integrate some IMcoders in a simulated robot:
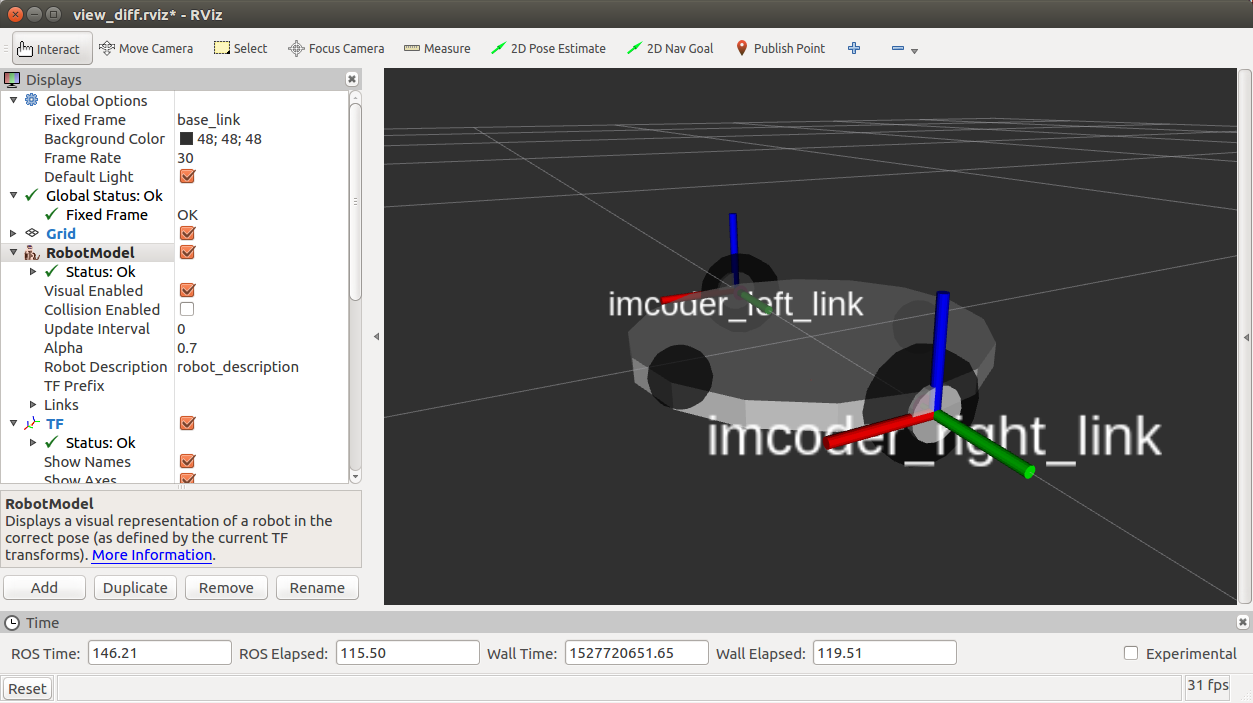
For not struggling our minds, we took an already designed robot and we attached our sensors to it. Now we are prepared for trying to get an odometry out of there...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.