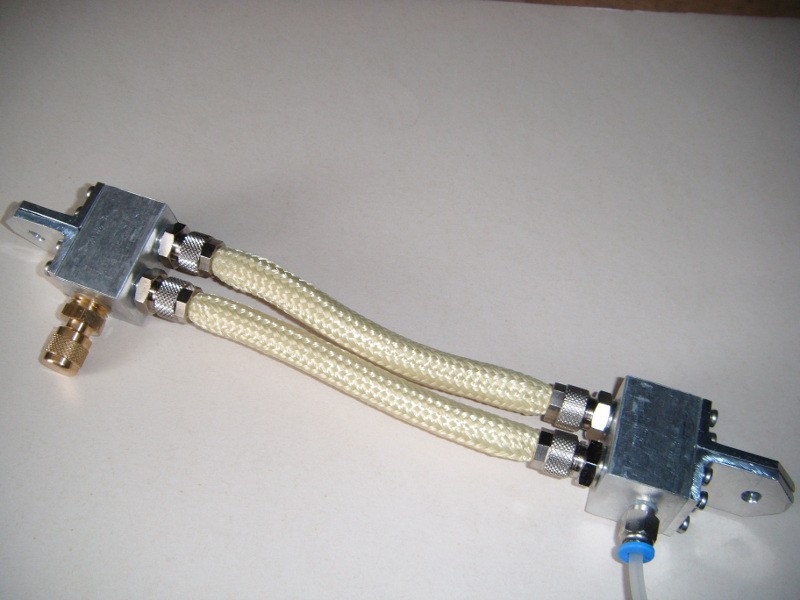
he basic idea behind the Preloaded Hydraulic Muscle is to use two inflatable bladders and keep them partially inflated in the idle state ( t. A gear pump transfers the fluid from one bladder to the second one moving the actuator.
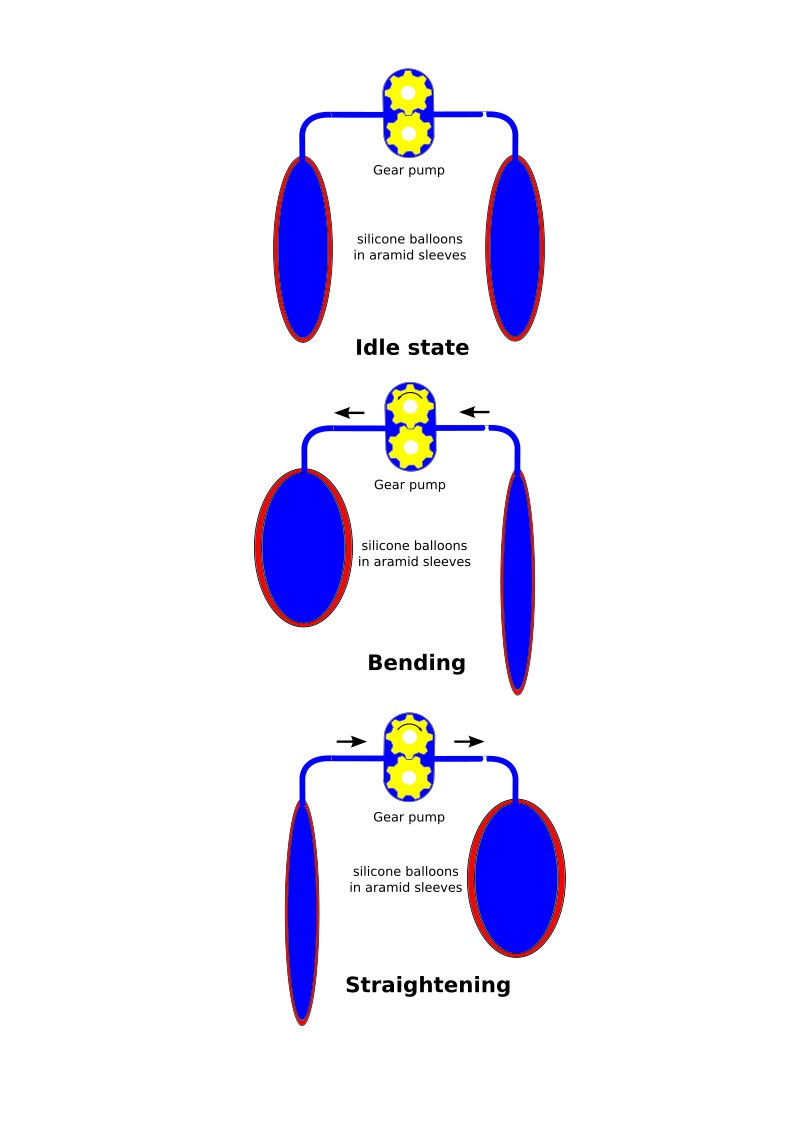
Each of the bladders is inserted into a sleeve made from the aramid fiber , which transforms the swelling of the bladder into linear motion of the actuator. Since the amount of hydraulic fluid in the both bladders is constant , there is no possibility to rupture the bladder with excessive pressure as long as the muscle system was filled correctly initially.
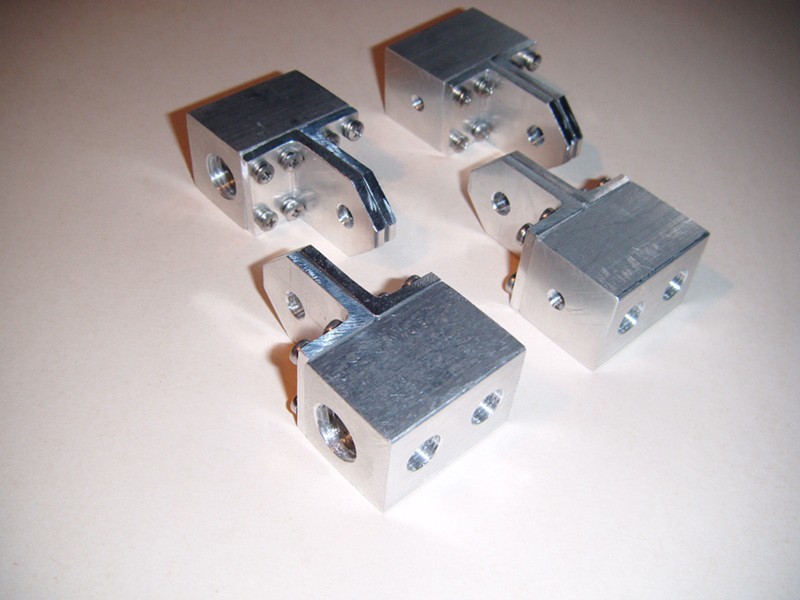
The module consists of four parts :
- two actuators ( one for bending , one for straightening motion )
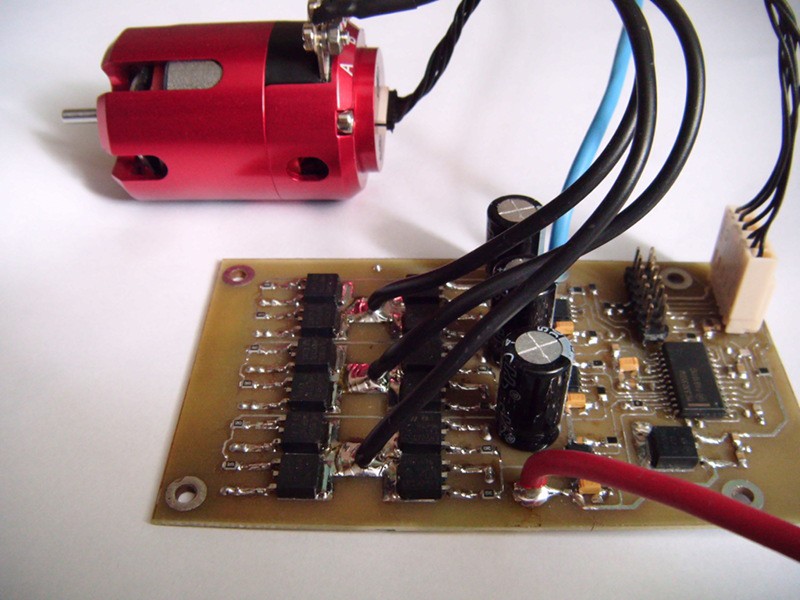
- miniature gear pump with a BLDC motor
- BLDC motor controller
- logic board with microcontroller , responsible for interfacing with control circuits , servo mode operation , PID , monitoring and communication .
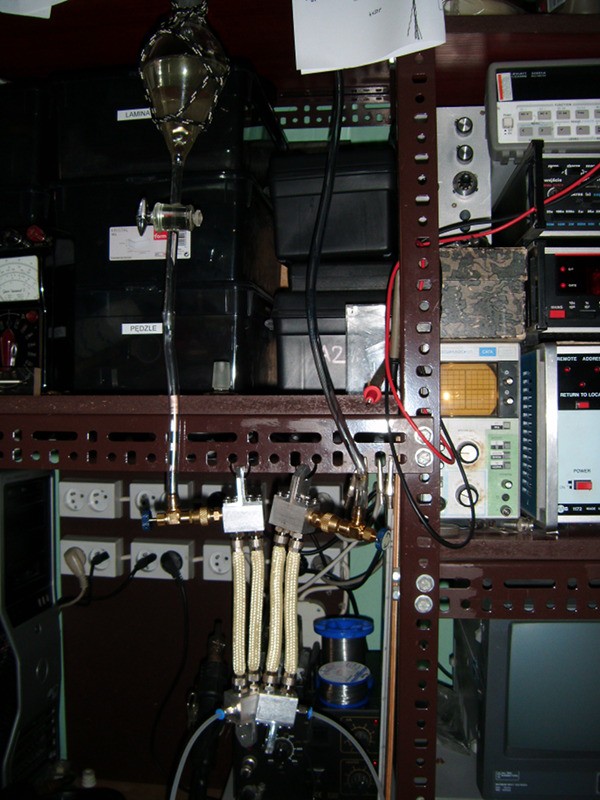
The two videos below show the operation of the prototype , still without the logic board.
In the next posts I will present the whole design of this actuator
 The pump needs to be modified a bit :
The pump needs to be modified a bit : 





 Brian Brocken
Brian Brocken
 Rob Kuelbs
Rob Kuelbs
 jupdyke
jupdyke
I know I'm the only one commenting here -- but -- have you considered (a) using something a little less rigid than silicone tubing, and (b) using the muscles in opposing pairs, the way nature does it?