 Haddington Dynamics
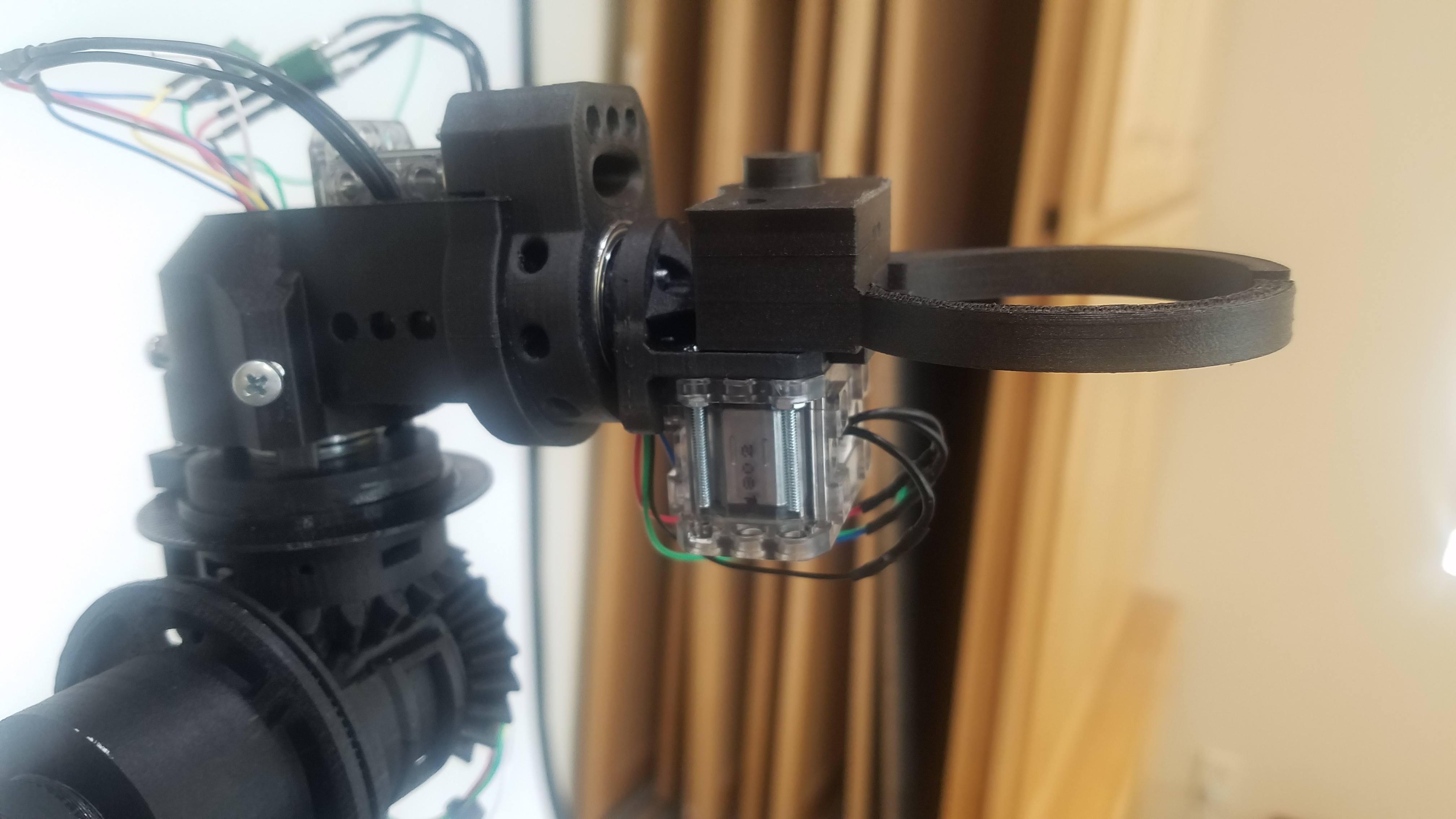
Haddington DynamicsUsing our new tool interface design, we have printed a reconfigurable gripper end effector. On the 7th axis, there is a servo for rotary power takeoff for a movable finger which works with a fixed finger. The end effector is removable so different tools can be used. We have already made end effectors for use with pruning scissors, tweezers, and a manual vacuum pump. If you want to build your own, the STLs are available on Thingiverse: https://www.thingiverse.com/thing:3166448


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.