 Haddington Dynamics
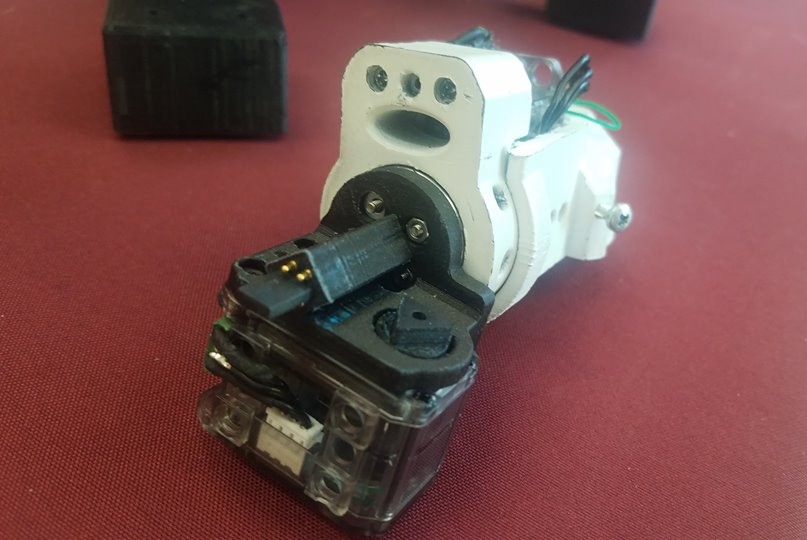
Haddington DynamicsWe have developed a new tool interface for use with Dexter. It provides more interactivity with a pair of Dynamixel XL-320 servos as a 6th and 7th axis. The 6th axis acts as a wrist and the 7th is available to power a gripper or other end effector/tool. With their built in torque sensing, they can be back-driven like the rest of Dexter's axes. We are also working on adding a set of pogo pins to bring out signals and a tiny screen to display information and take selections from a user. https://github.com/HaddingtonDynamics/Dexter/wiki/End-Effector-Servos
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.