 Tim Wilkinson
Tim WilkinsonI've added an Inverse Kinematics (IK) module to the 8BitRobots Blockly programming interface. This is described here (https://hackaday.io/project/152729-8bitrobots-module). The goal is to make it simple to use IK without learning all the math. As a quick test of the software I built a simple two-piece robot arm (using the servo brackets from this project https://hackaday.io/project/158800-nabi-a-sideways-walking-robot-8bitrobots) rather than immediately jumping on the IK for the arm described in this project. Here it is in action:
On the right-to-left stroke the tip of the arm (effector) attempts to stay on a straight line (it moves between five points). The code for this looks like this:
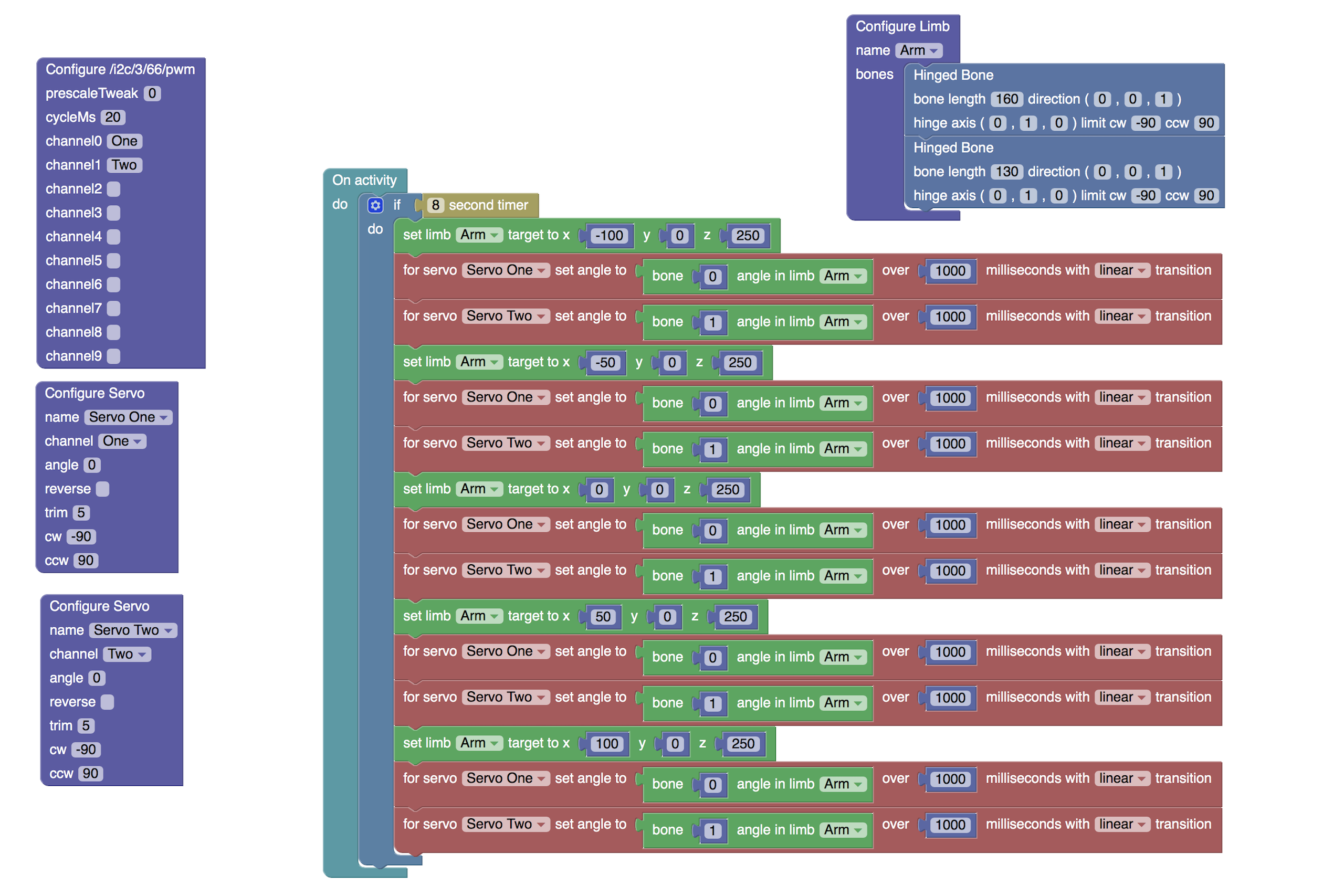
The arm consists of two "bones" hinged on the same axis. This code moves it on a path every 8 seconds, with each movement taking a second (so 5 seconds of movement, with a 3 second pause). The IK part is given the point to place the effector, and generates the angles for the two arm servos.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.