 Tim Wilkinson
Tim WilkinsonThe ROV consists of two major parts: the outside frame which houses the thruster on the wet side, and keeps the water out; and the inside ball which contains all the electronics and hangs and rotates the outside frame to vector the thrusters as necessary.
The outside frame (without the acrylics domes) looks like this:
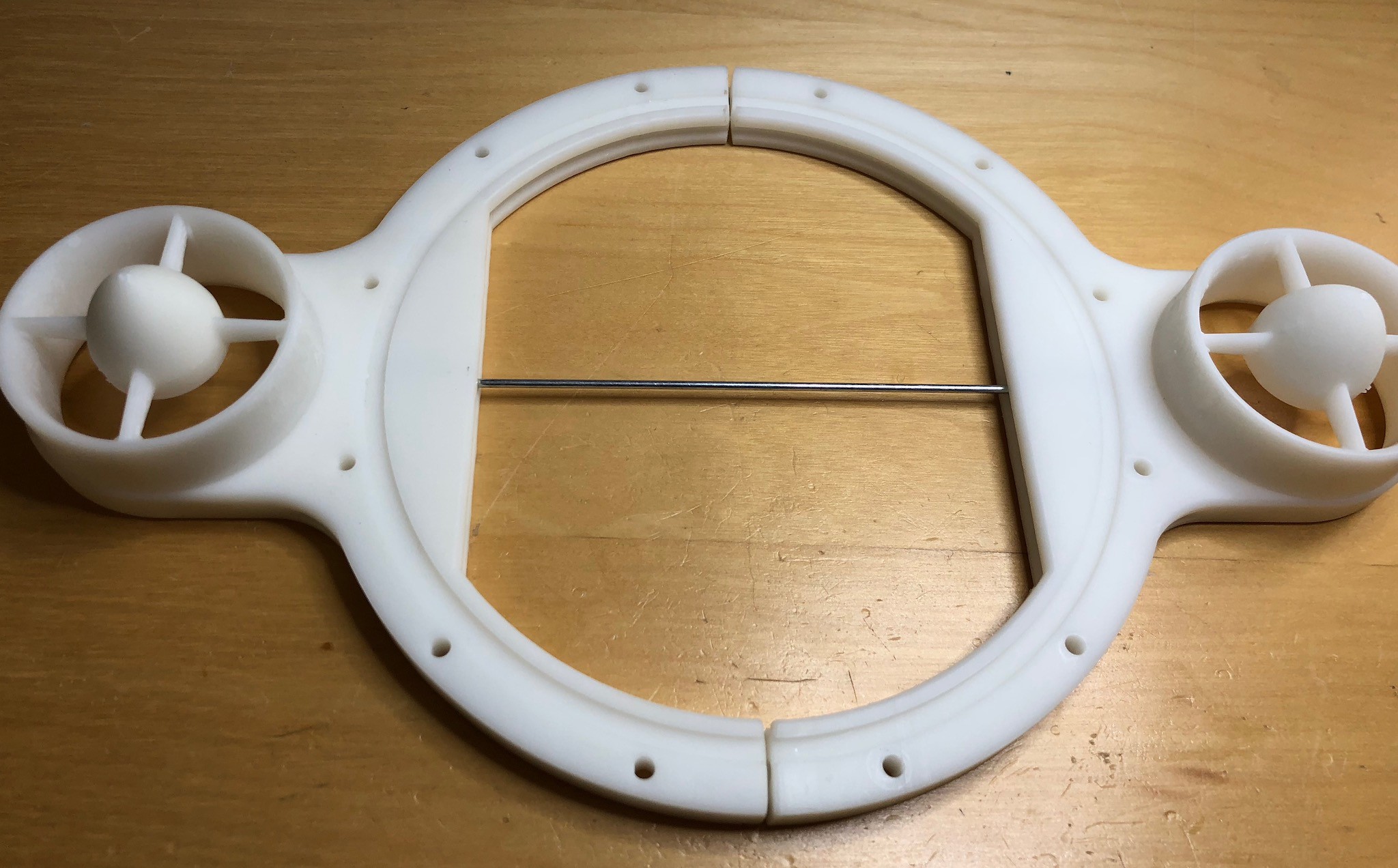
Ultimately this frame will be glued into one piece, with the solid metal bar in the center on which hangs the inner ball. My first design of this robot required that I assemble the ball onto this bar before I glued it all together. This made maintenance and changes impossible without destroying the frame.
This time I've designed the inner ball to be bolted around the bar after the fact:
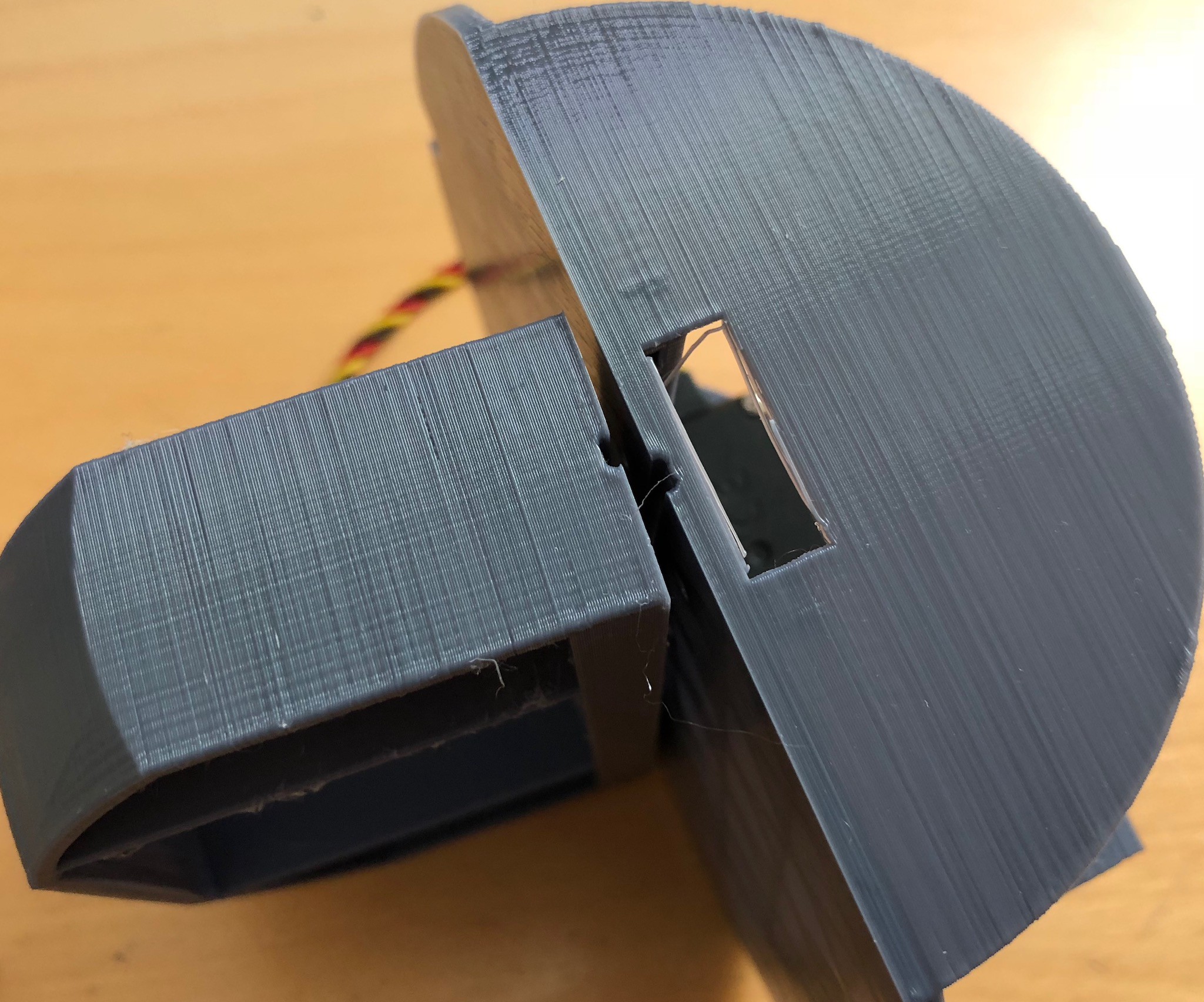
The above show the electronics part of the ball (right) and a slice of the lower ballast part of the ball (left - I just printed a slice to test the idea before printing the full part). A notch runs down both pieces (approximately in the center of this photo) which fit around the bar. The two pieces are then bolted together.
Other pieces will also be added to the bar in order to position the ball in the center and to allow it to vector the frame using gears and a servo. I'd originally intended to add the gears before gluing the frame, but again I'd prefer not to so I can tweak the design later.
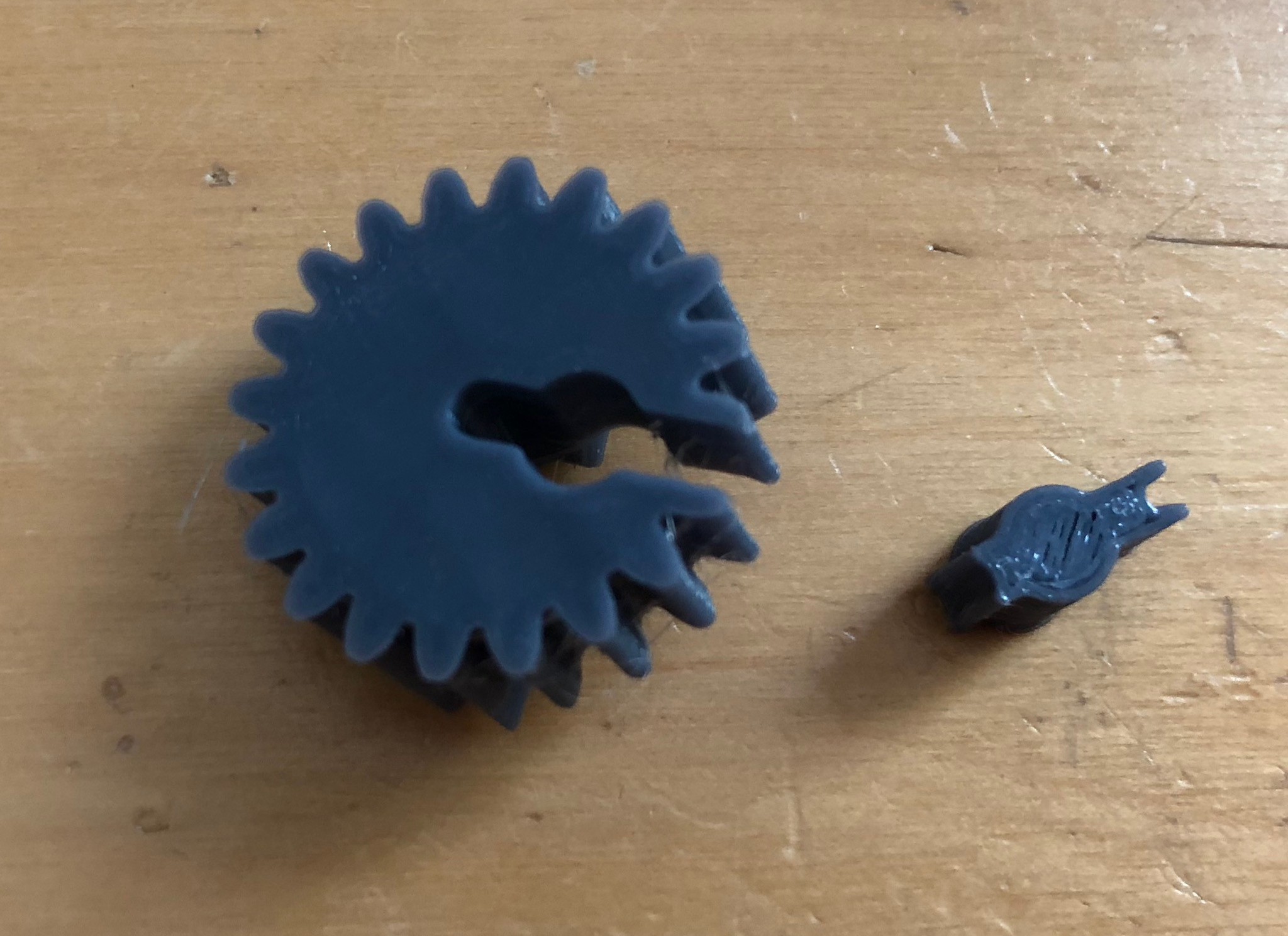
I ended up designing the gears with a cut out to allow it to slip onto the metal bar, and then a "plug" inserted to keep it in place. A little glue might be required to keep these bits together, but I'm less concerned about destroying these small pieces in the event I need to change them.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.