 Tim Wilkinson
Tim Wilkinson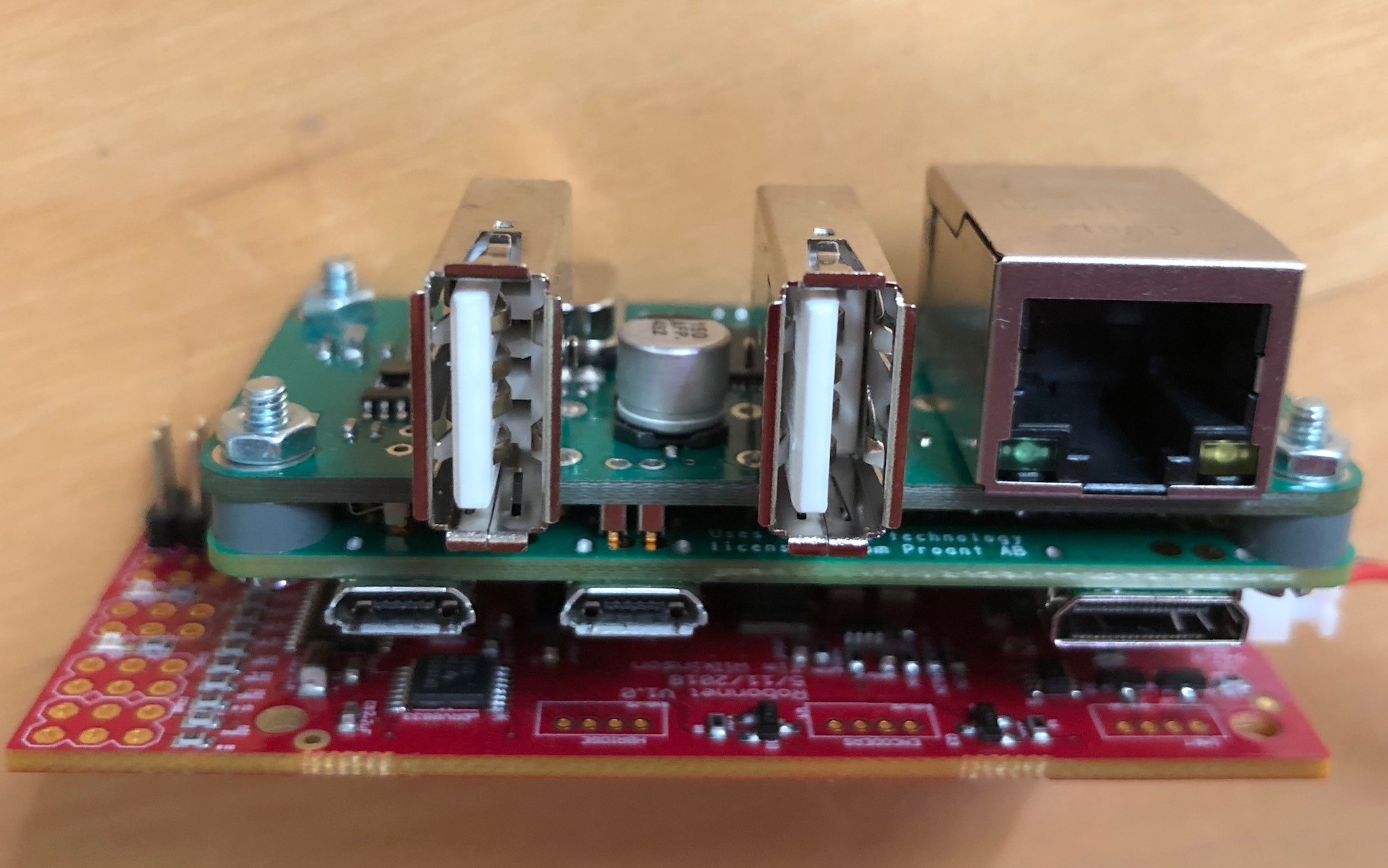
After a lot of exploring and general indecision, I've decided to go with the simplest communications system for the ROV - good old fashioned ethernet. I seriously considered optical, but the suggested POF stuff is bulky, the optical USB cables very expensive and reviews suggest not very durable, and ethernet over fibers transceivers are - again - bulky.
In an attempt to keep the tether size down, I'm using 3.8mm OD Cat6 (see https://smile.amazon.com/gp/product/B00BIPOC64) rather than the more traditional 6mm cable. There's even some 2.8mm cables out there, but I couldn't find that in 30m lengths; which was a shame.
This compares nicely to BlueRobotic's Fathom Slim ROV tether with has a 4mm OD.
Using the ethernet daughter board I found on Tindie (see https://www.tindie.com/products/marcel/raspberry-pi-zero-ethernet-rj45-and-usb-hub-shield/) I can stack my 8BitModule board on one side of the Pi, and the ethernet connector on the other. The resulting sandwich is in the photo above. I doubt I can get much more compact than this.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.