 Tim Wilkinson
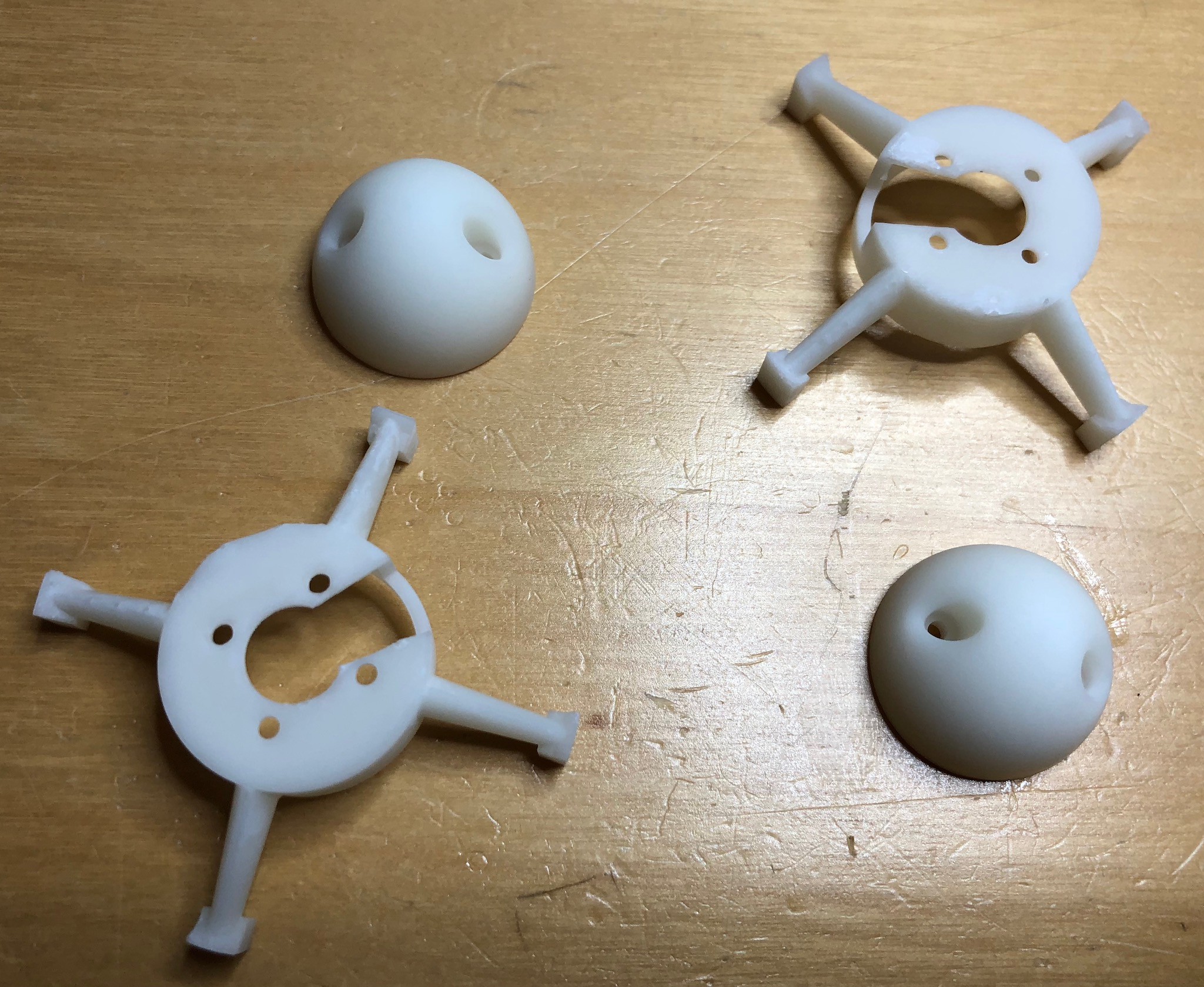
Tim WilkinsonThe thrusters are built around the Turnigy Multistar 1704-1900Kv 12 Pole Multirotor Outrunner V2. The prop and enclosure are printed using the glass fiber rigid Form2 material.
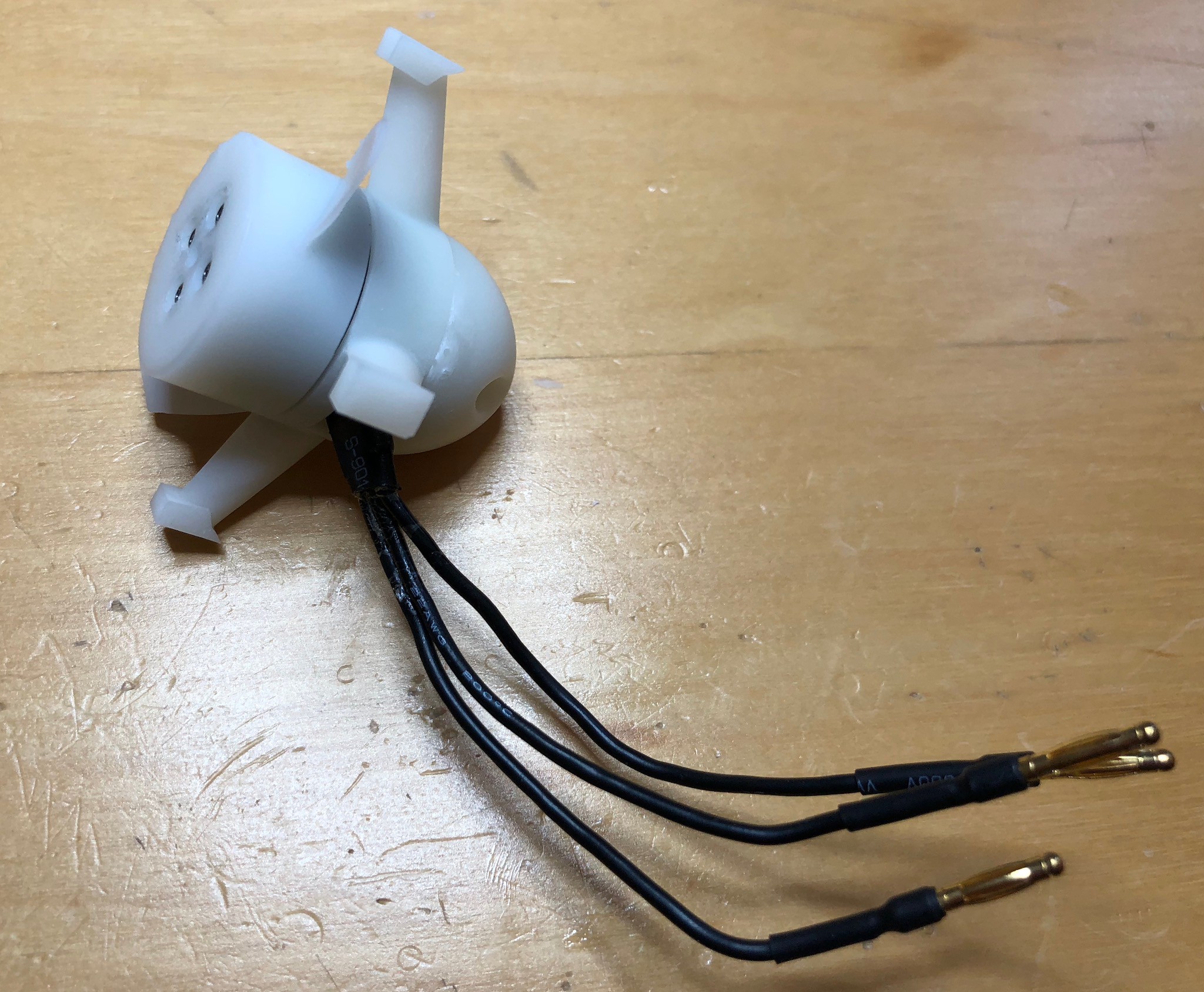
The motors are first sprayed with conformal coating (https://smile.amazon.com/gp/product/B06XWGCKX5). While the Multistar motor can run underwater without issue, the conformal coating provides some level of waterproofing and - hopefully - prevents rust.
The motor screws into the support with a cover on the back for better water flow. The assembled thruster looks like this.
While the majority of the thruster is identical, the two props are mirrored so their rotational forces will cancel out when providing uniform forward or backward thrust.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.