 Tim Wilkinson
Tim Wilkinson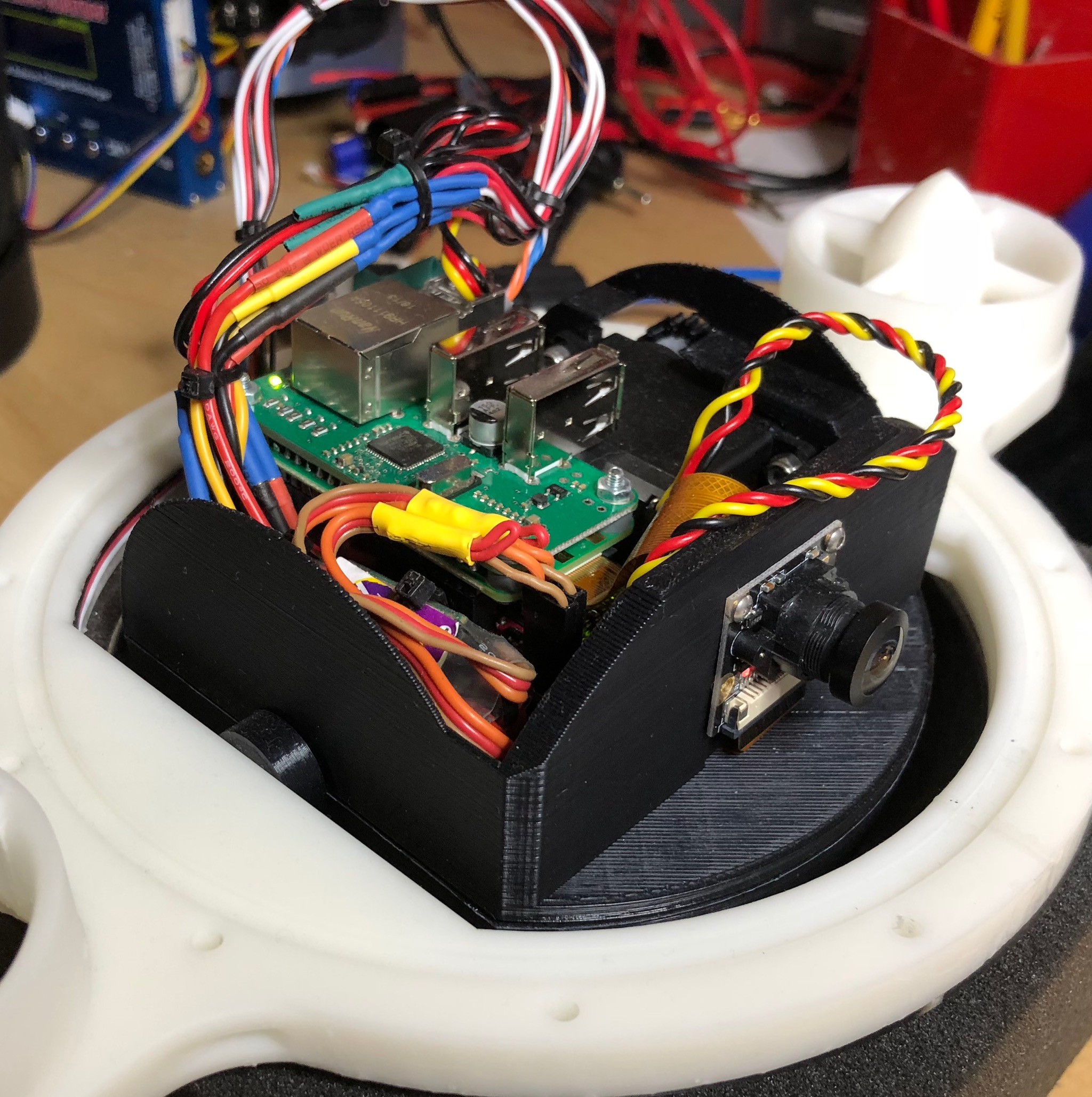 The above photo shows all the ROV internal assembled inside the frame (the photo below shows the same assembly from the back)
The above photo shows all the ROV internal assembled inside the frame (the photo below shows the same assembly from the back)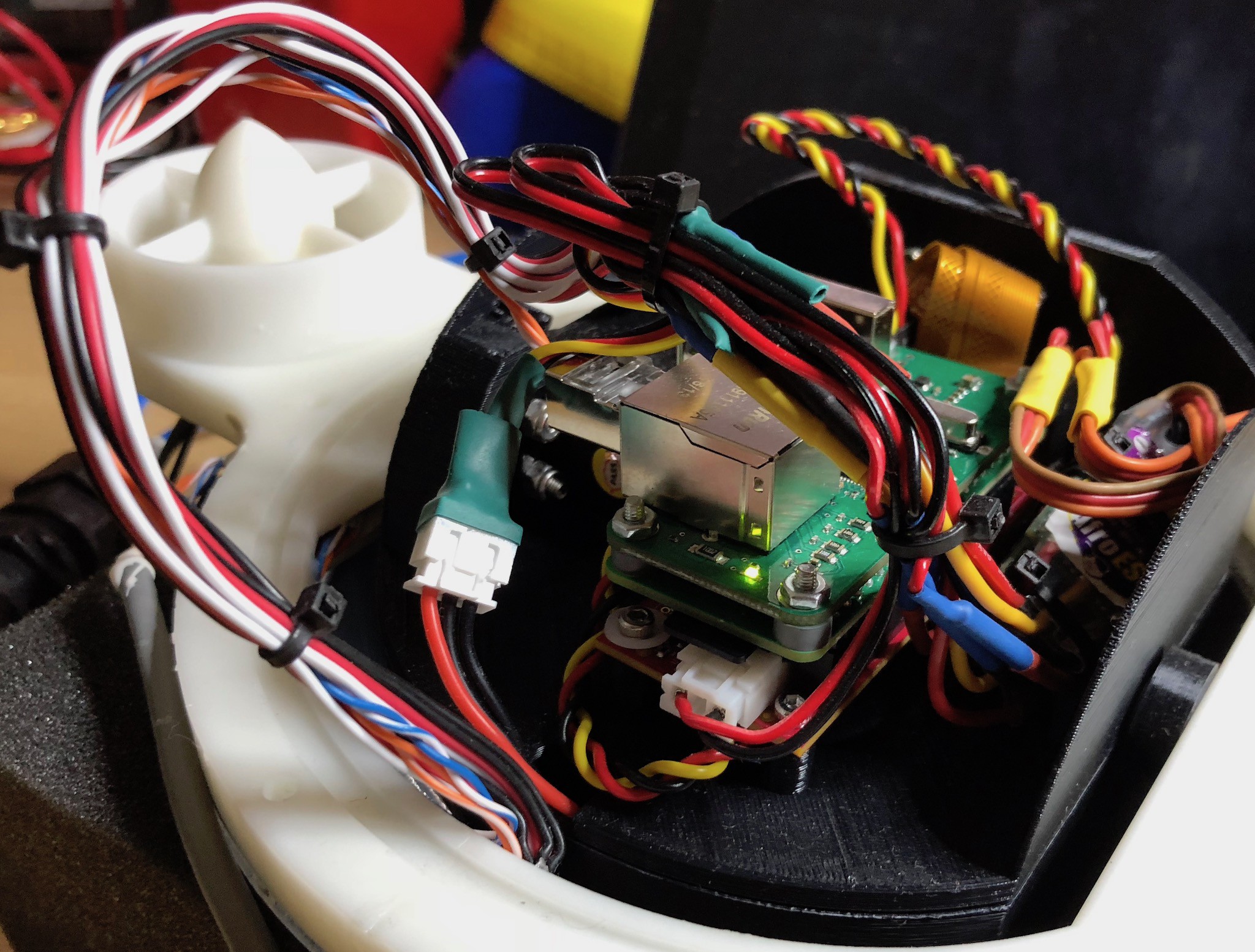
The brains of the robot (center of both photos) consists of a stack of three boards:
- Raspberry Pi Zero W
- 8BitModule
- Ethernet + USB expansion board (https://www.tindie.com/products/marcel/raspberry-pi-zero-ethernet-rj45-and-usb-hub-shield/)
The two brushless thrusters (Turnigy Multistar 1704-1900Kv 12 Pole Multirotor Outrunners) are controlled by Afro 10A Escs (which came from HobbyKing but aren't sold anymore - the 20A version would work just as well) stuffed down the right hand side of the board (back photo) and a HiTec HS5645MG servo on the left handles the pitch control. A standard Raspberry Pi Camera is mounted on the front.
The wiring harness runs out the back of the ROV frame, but loops up and down into the main electronics space so allow the frame to pitch around the central "ball" with snagging anything.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.