 Matous Pokorny
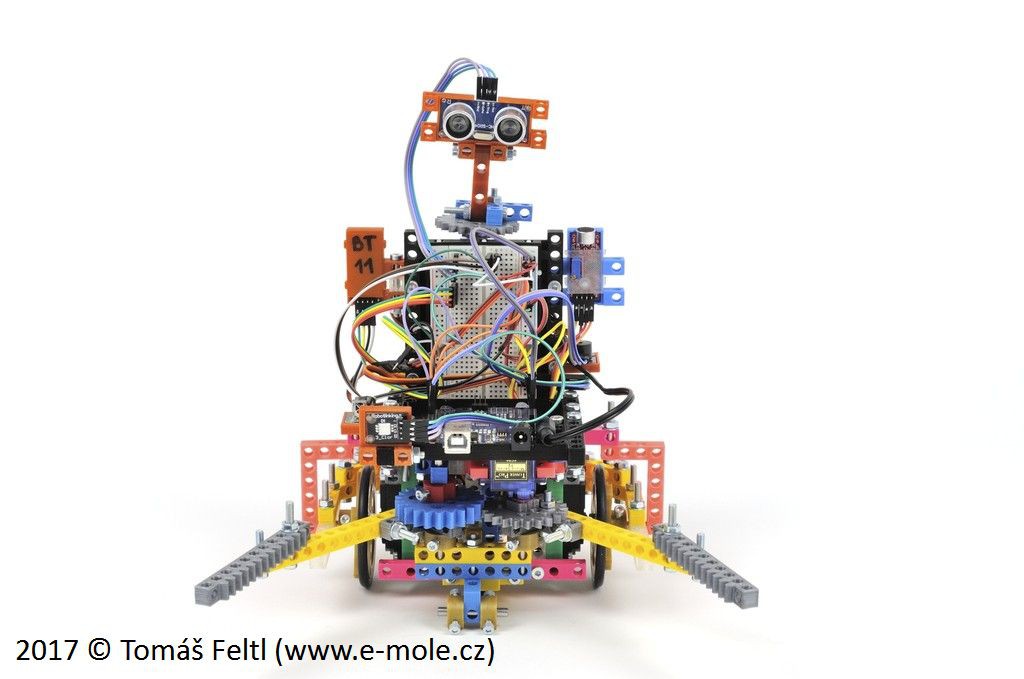
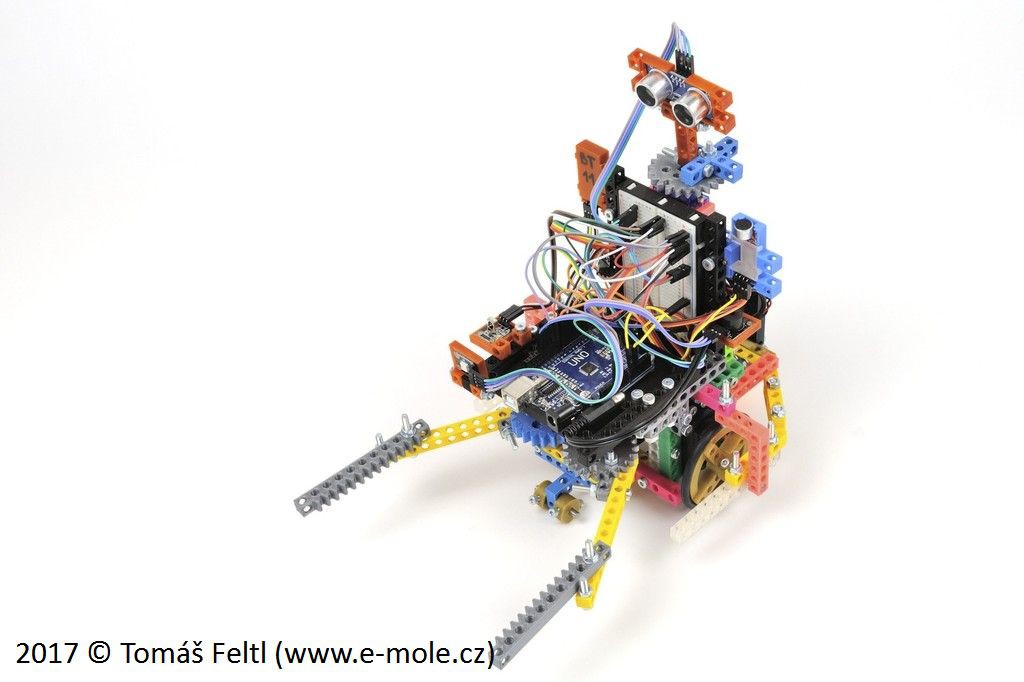
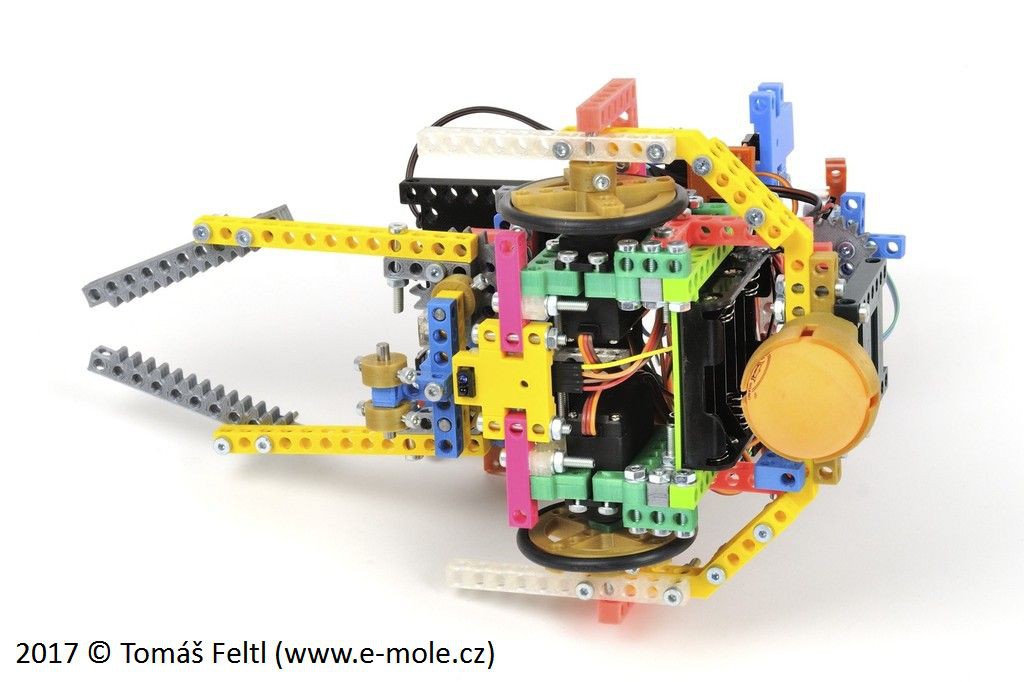
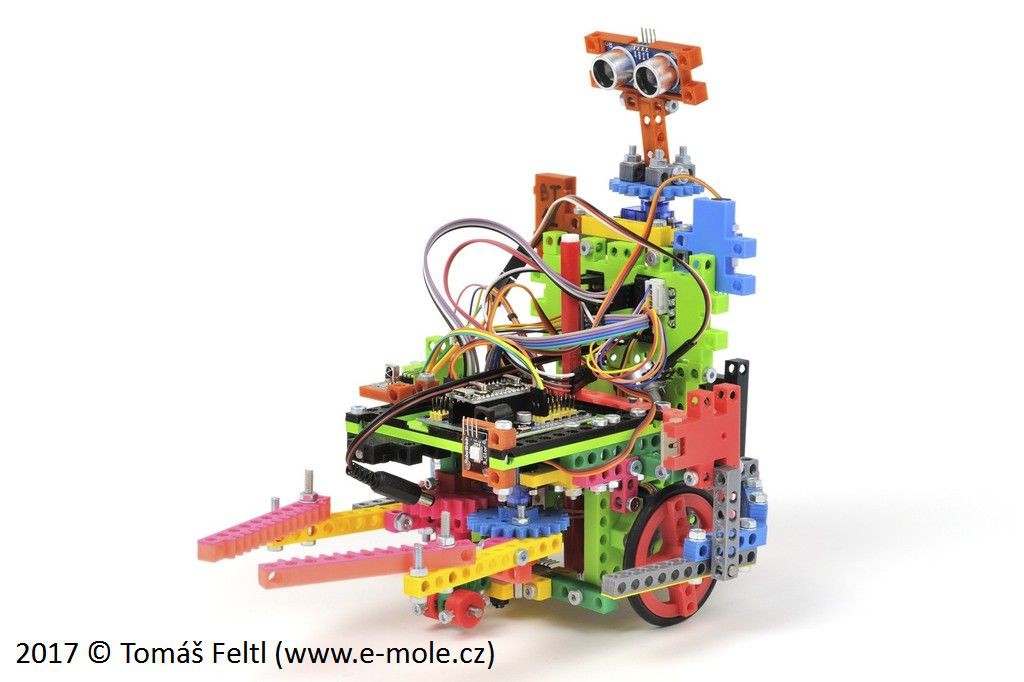
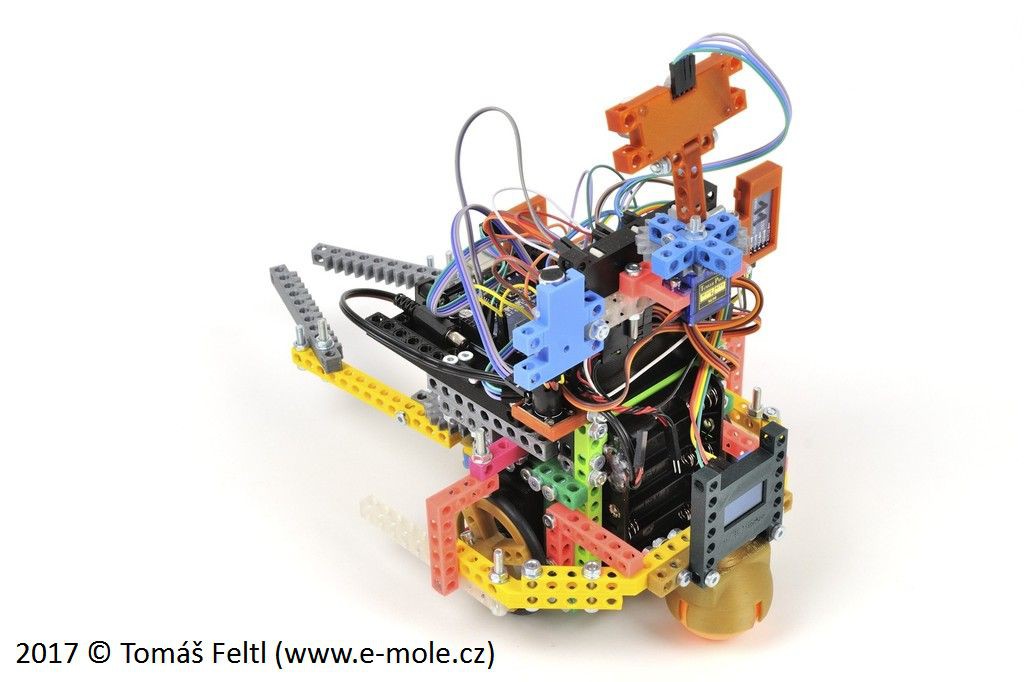
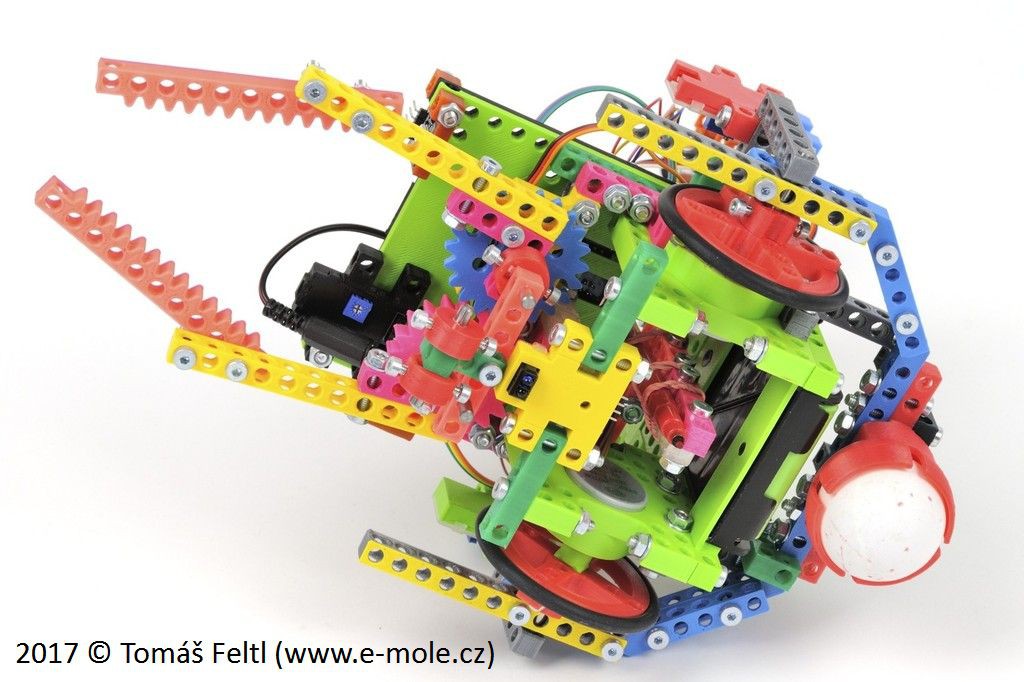
Matous PokornyMolik is the advanced robot with the gripper and several sensors. It can do a complex task like to find something and bring it. You can compete with it in some robotic challenge, i.e., ketchup house on the Robotic day.
There are two Molik's versions depend on motors. The first version uses 5V stepper motors 28byj-48. This version is accurate in motion but a little bit weak to manipulate with heavier objects. This Molik is suitable to draw pictures or play Ketchup house. The second version uses continuous servos. It is fast and strong enough to manipulate with objects but is very inaccurate. You can select the version appropriate for you.
We are still working on nice, smooth, powerful and accurate robot motion. Molik's build instructions are in alpha version, and some sections are missing. I would like to discuss ideal motors for m-BITBEAM in another log a complete the build instructions.
Molik's build instructions with the stepper motors: l08-molik-v00r02-stepper-web.pdf
Molik's build instructions with the servos: l08-molik-v00r02-servo-web.pdf
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.