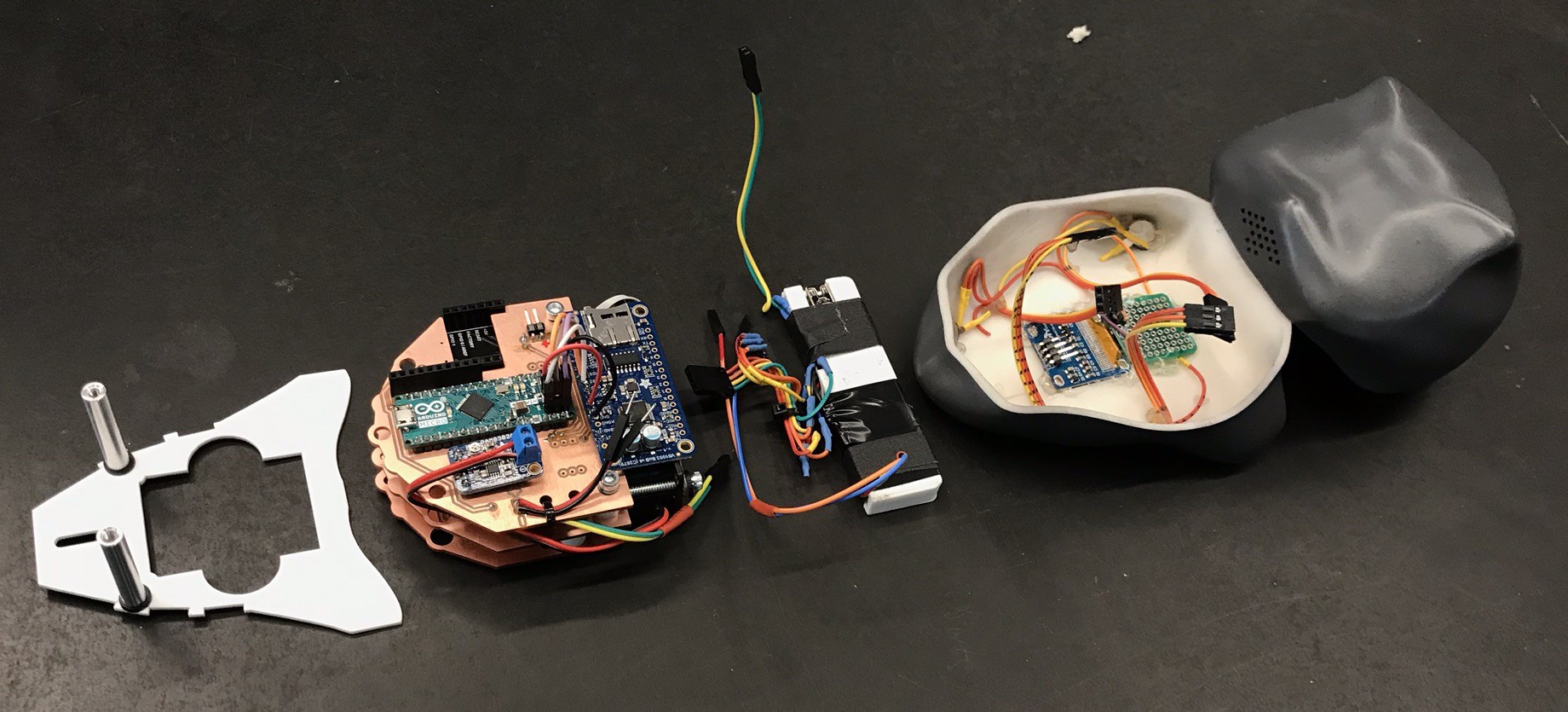
The internal components are made up of two main micro controllers that communicate between them and to some mobile companion apps. One is the hardware wallet circuit allowing for storage of the (cat) token(s). The other is designed to interoperate with these tokens meta-data to realize a unique behavior for each digital asset that inhabits Cherishablez. This allows us to interact with Cheshishablez, and to discover a cats attitude or CATtiude. Below shows the process.
How do we get all this to fit ?
It kinda needs to be in this shape on the right, a stack or brick design can work.
Lets start near the bottom and work are way up.
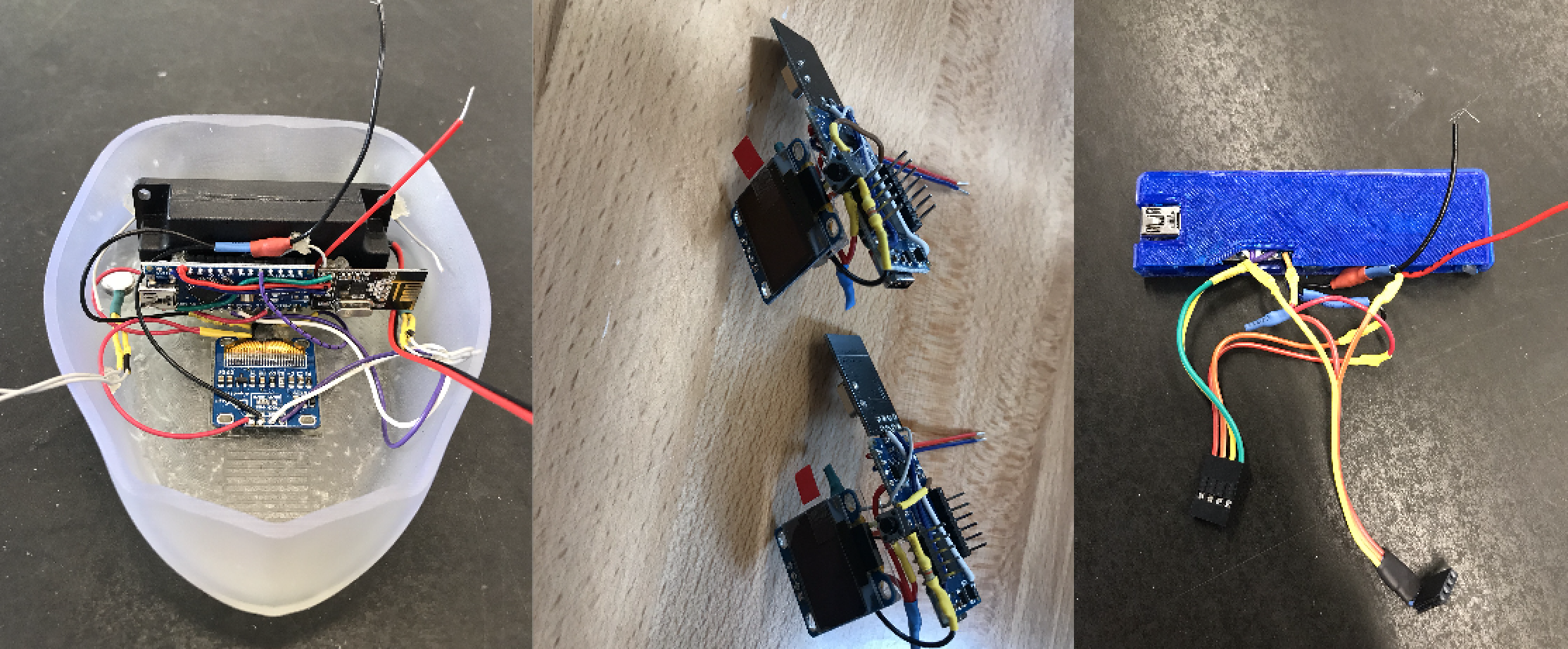
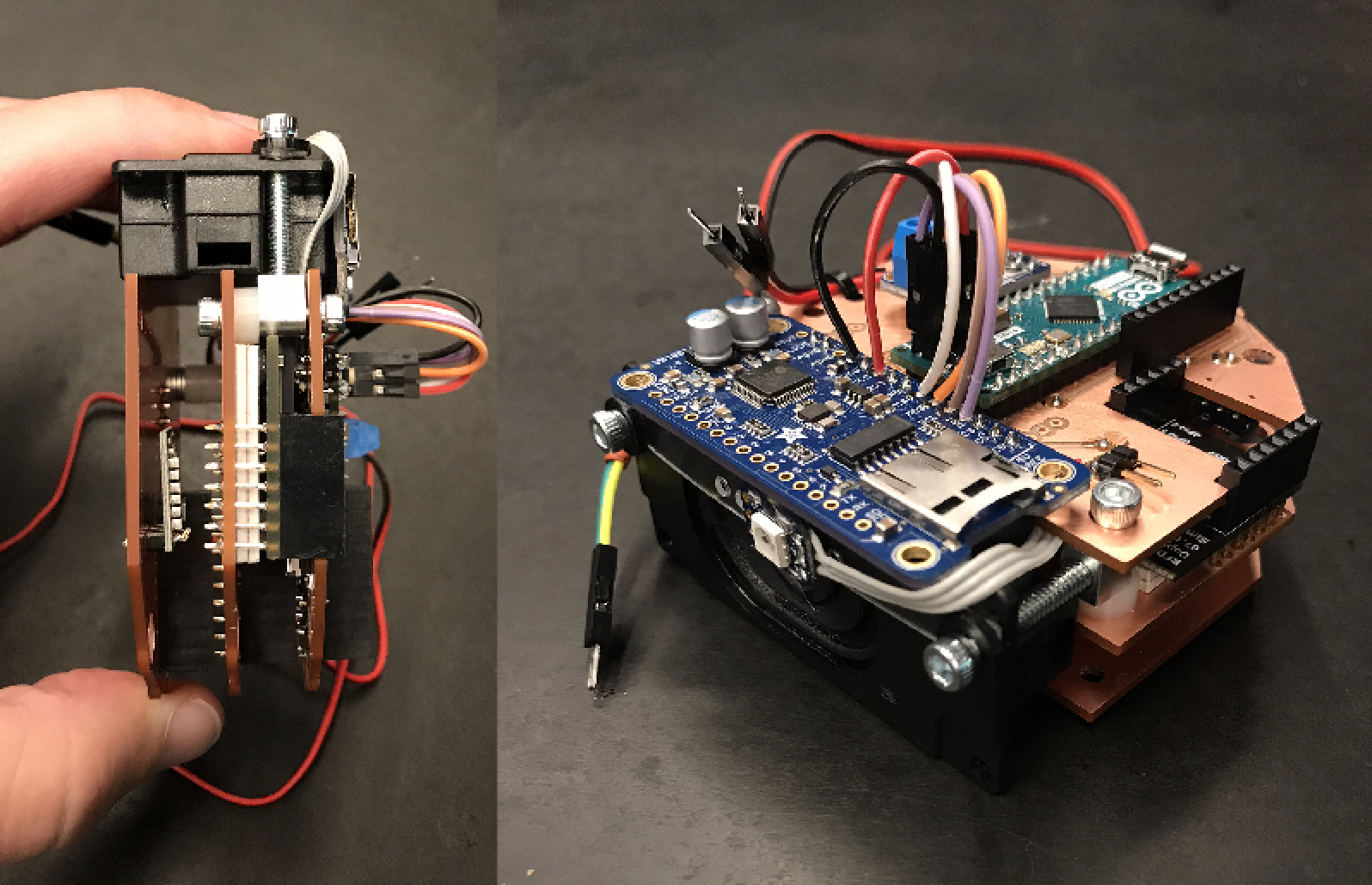
1. The hardware wallet and speaker.
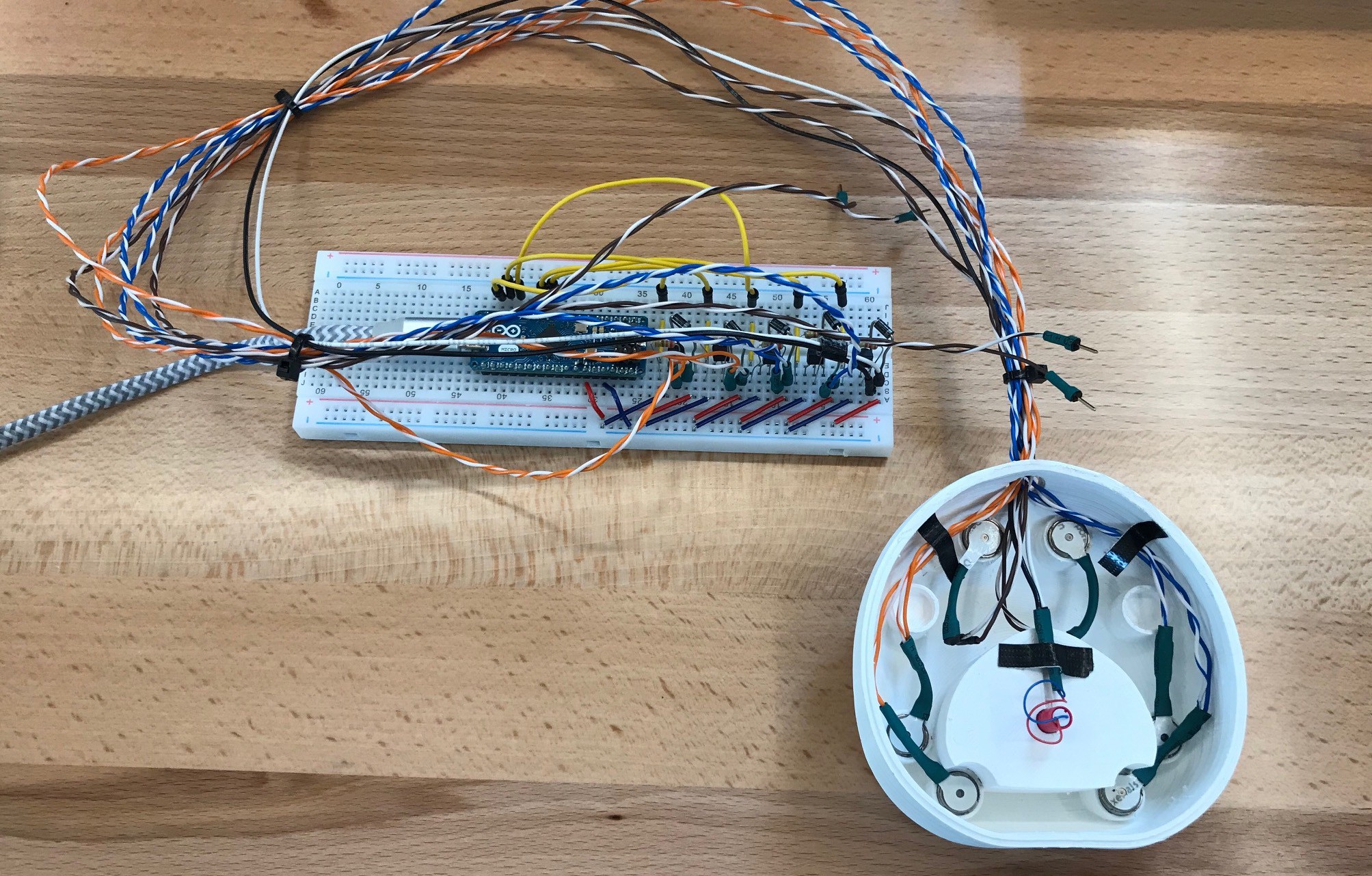
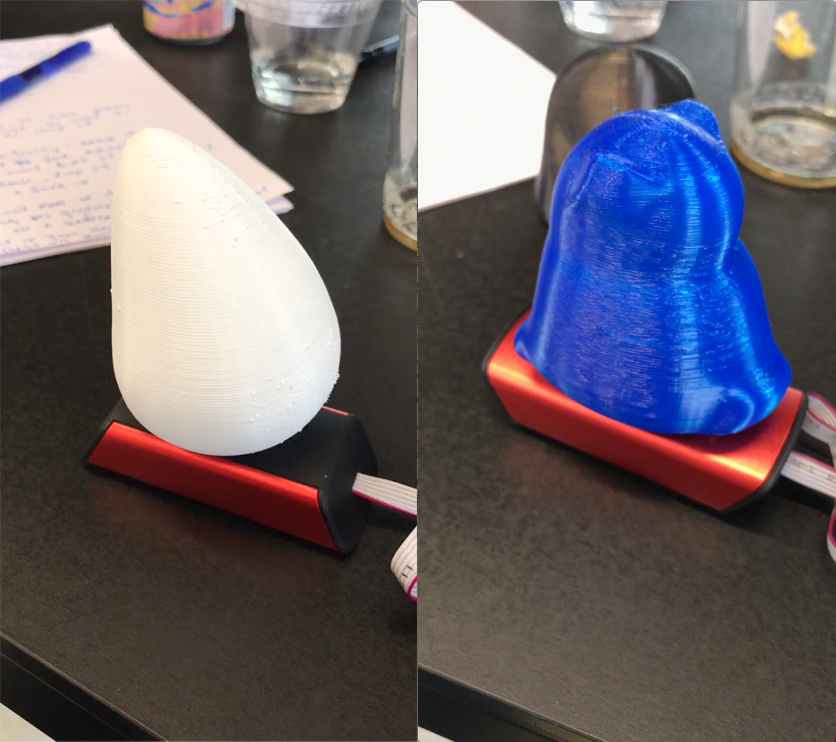
We did a few iterations on the wiring layout to the bundle. The blue enclosure on the right turned out to be the most stable design to use.
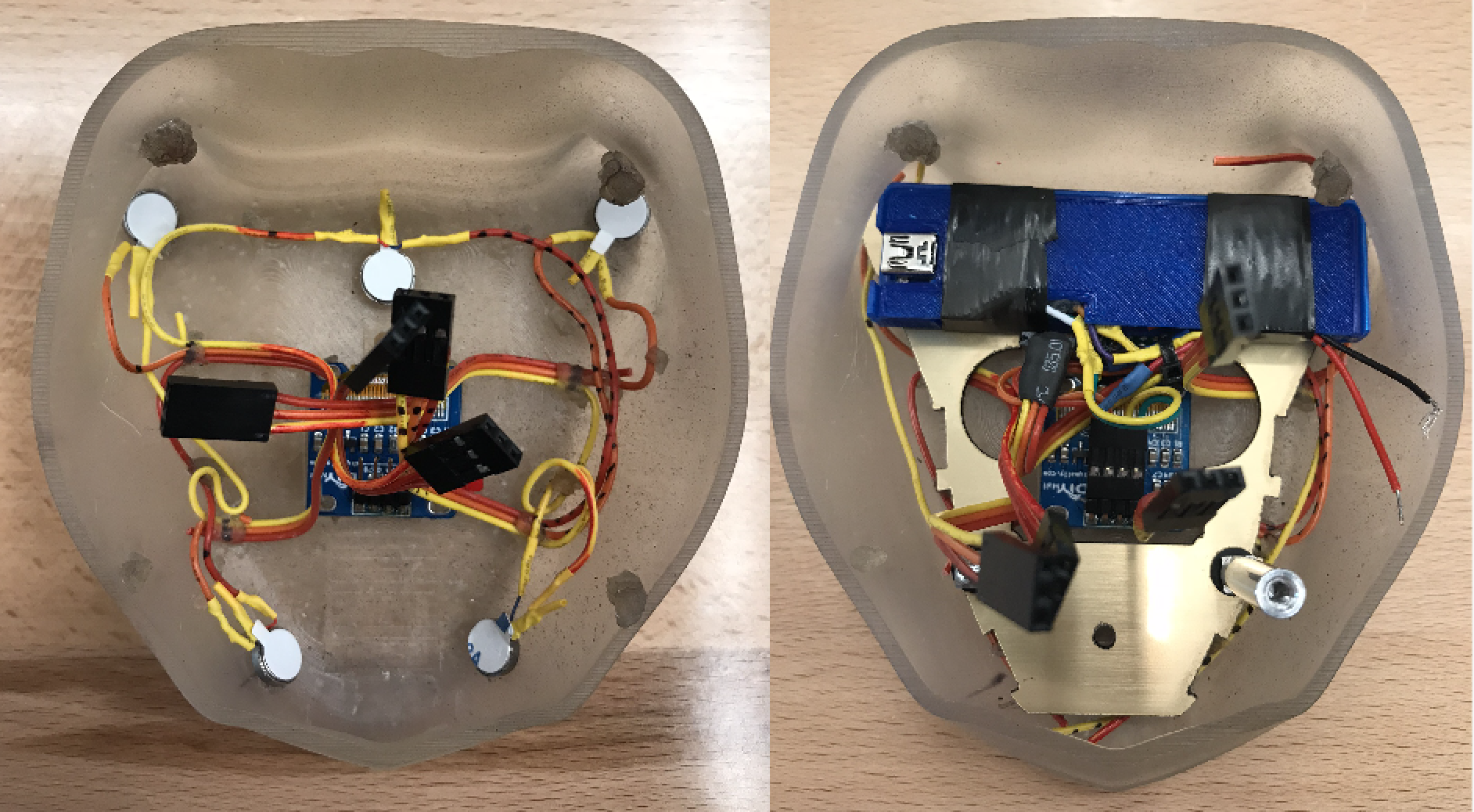
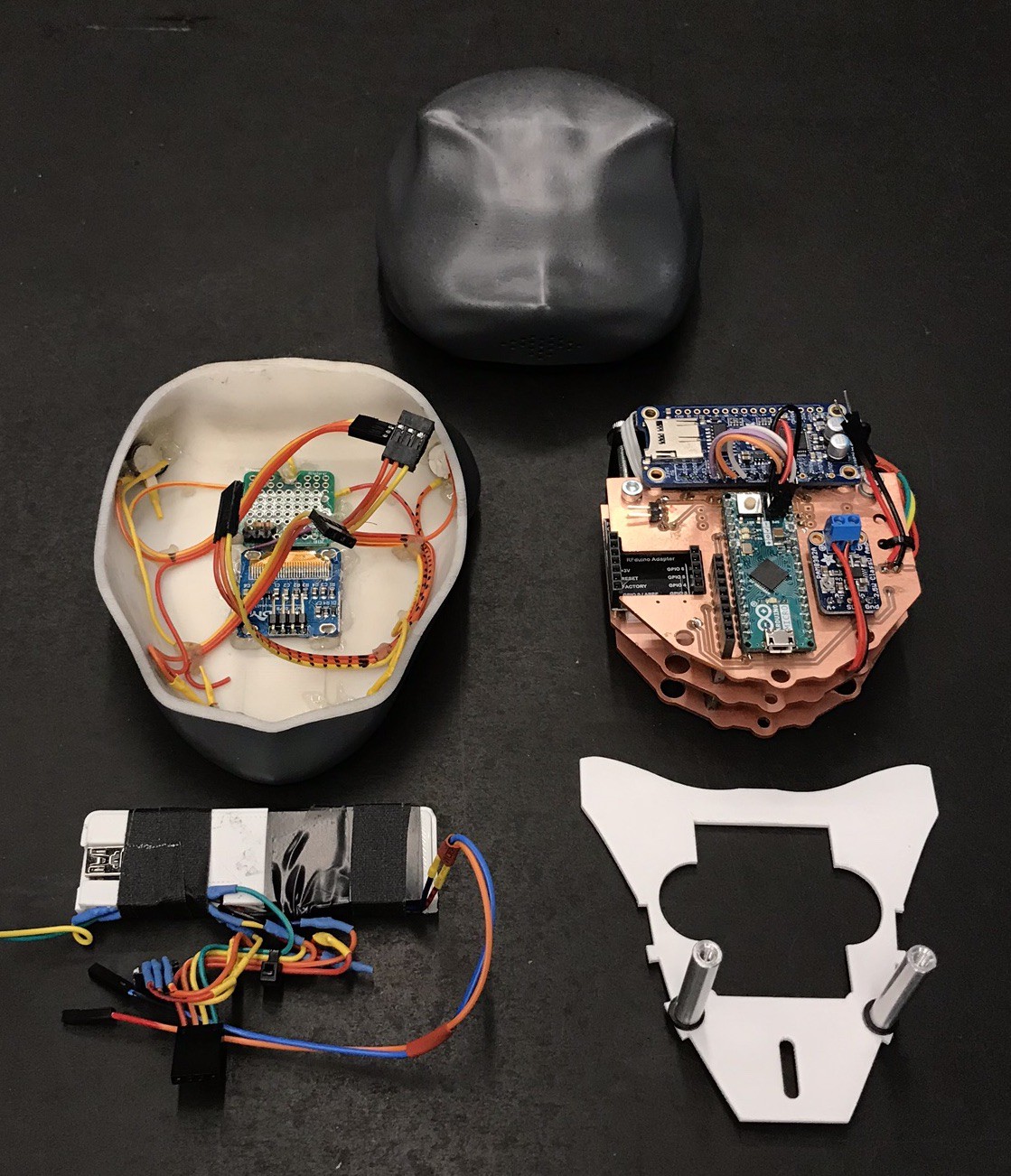
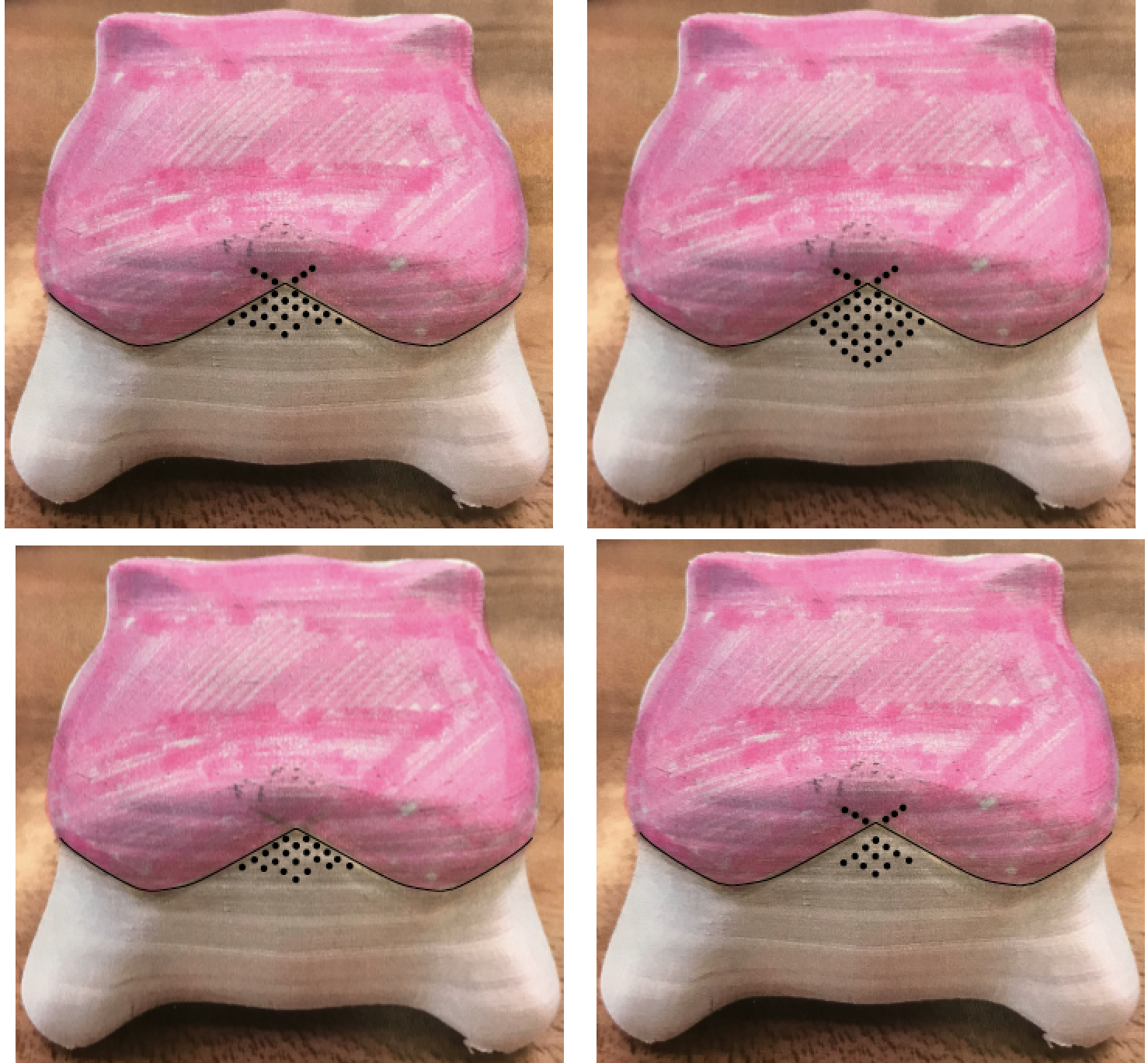
2. Motor Layout and wiring.
The white dots are the motors wired up and ready to be plugged in the brick. You can see how the blue wallet stacks on top of the motors and screen.
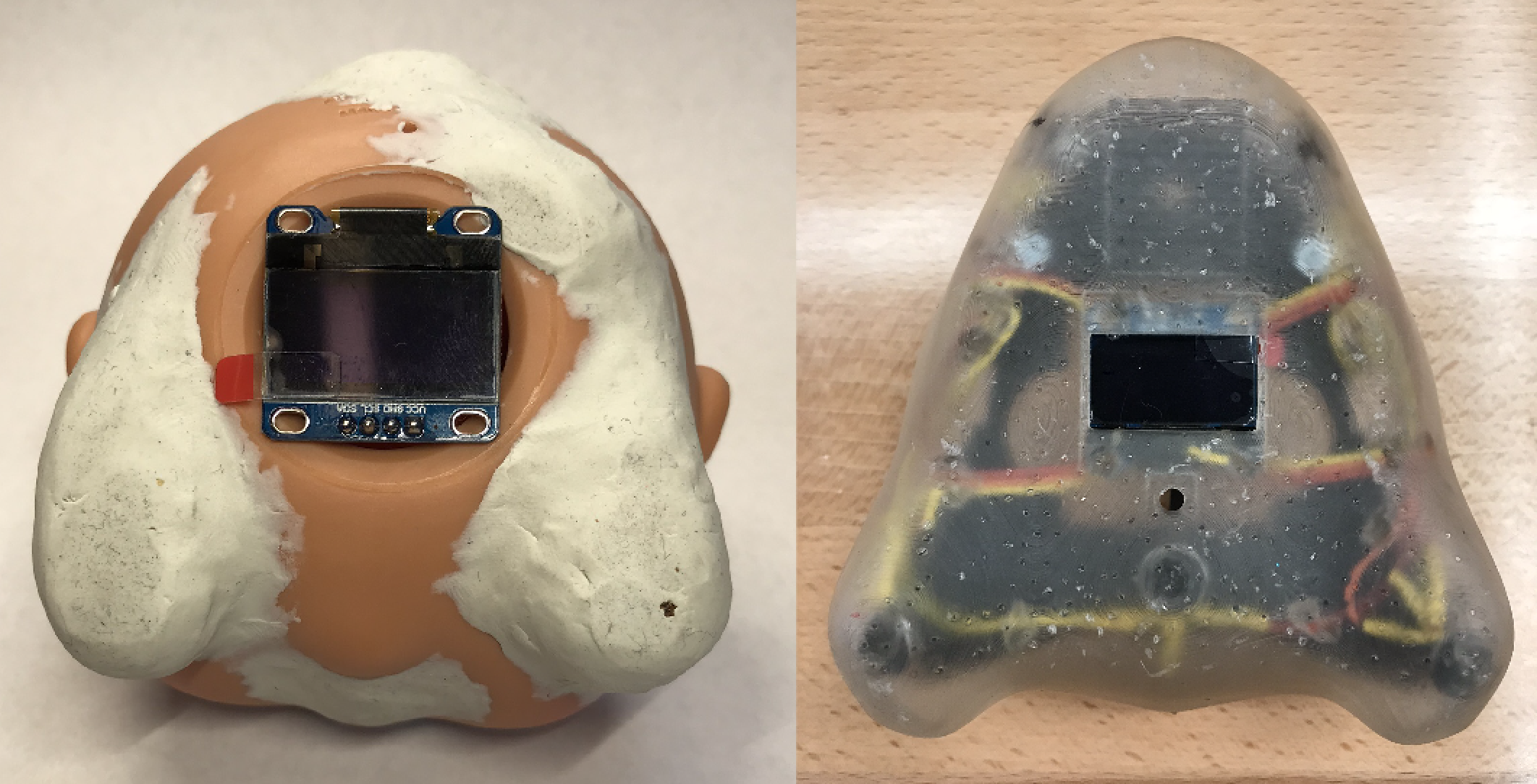
Intergrading the screen into the bottom, from sketch to final form on the right.
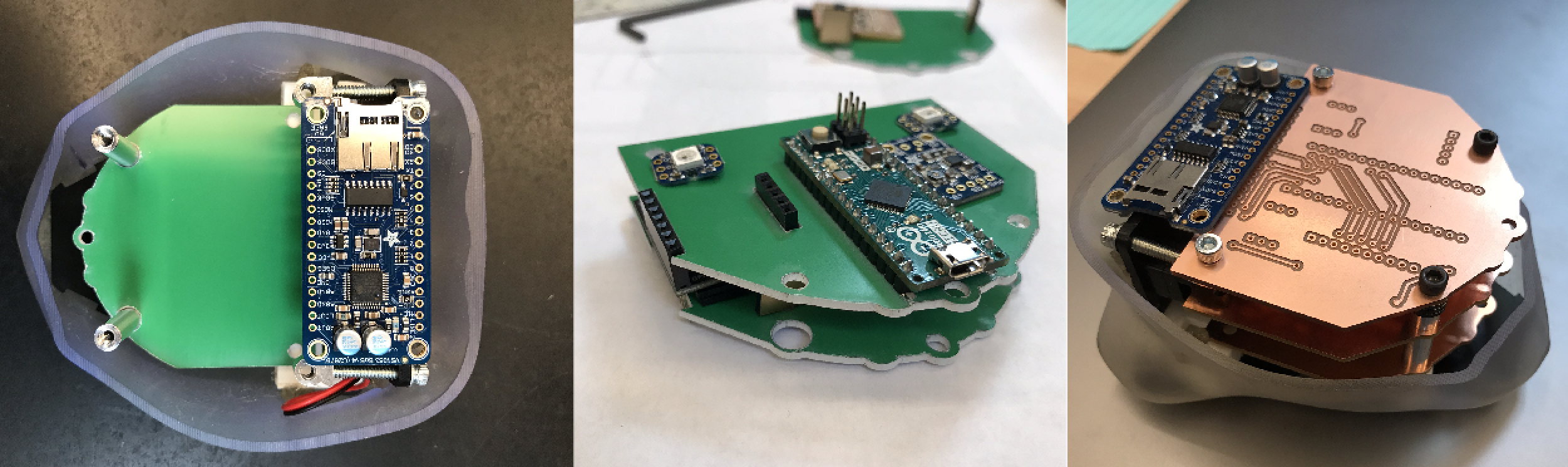
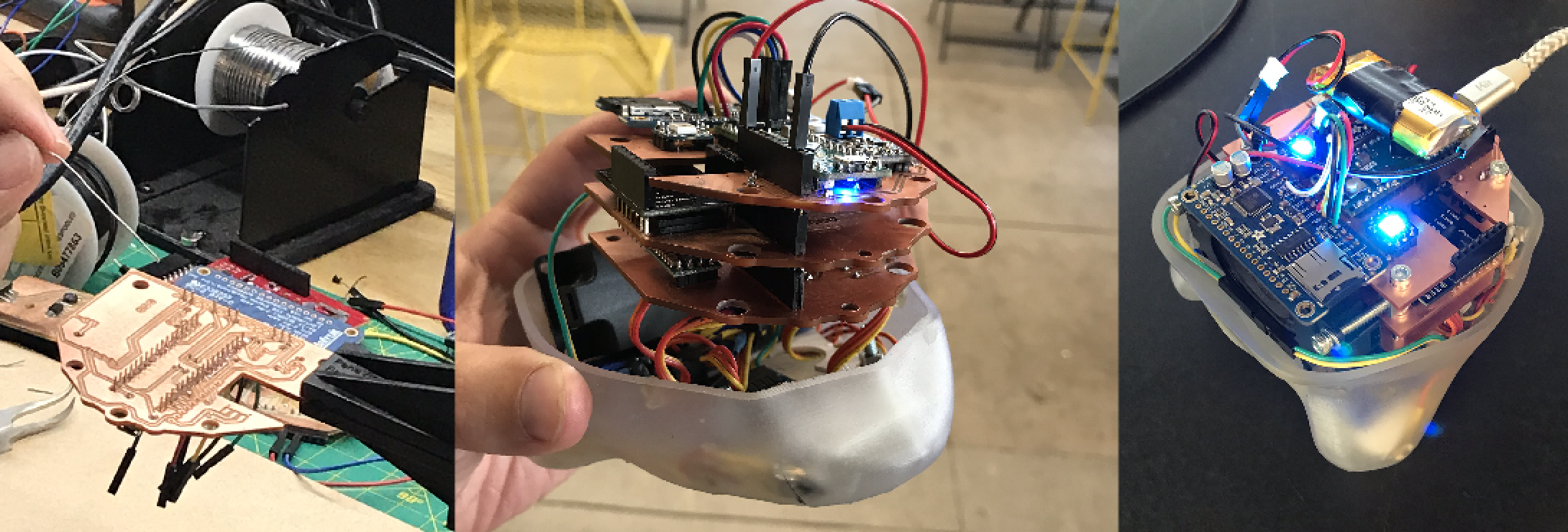
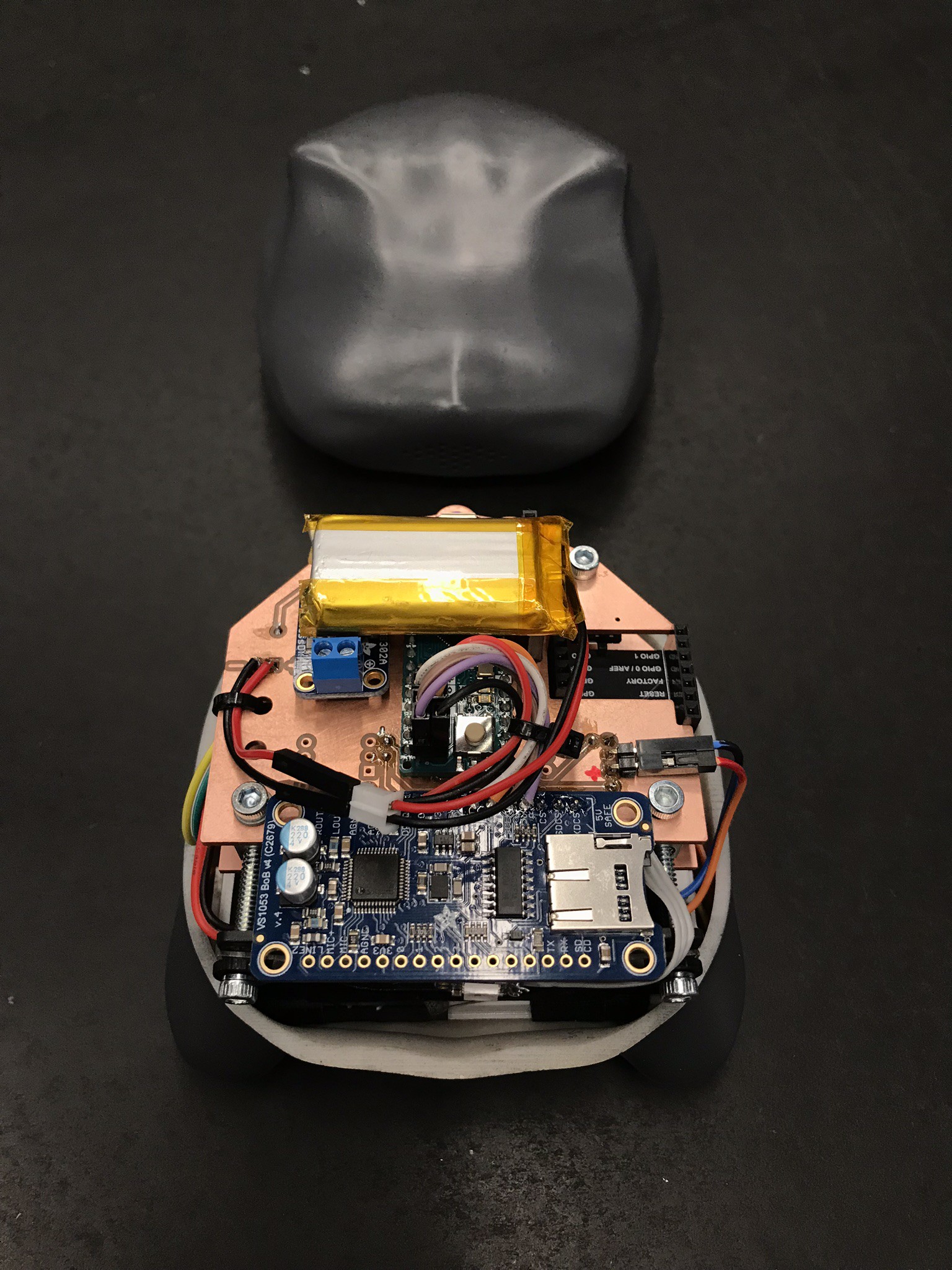
3. Making the PCB stack.
The green laser cut boards helped with placement, size, and shape for the PCBs to fit in a three layer design.
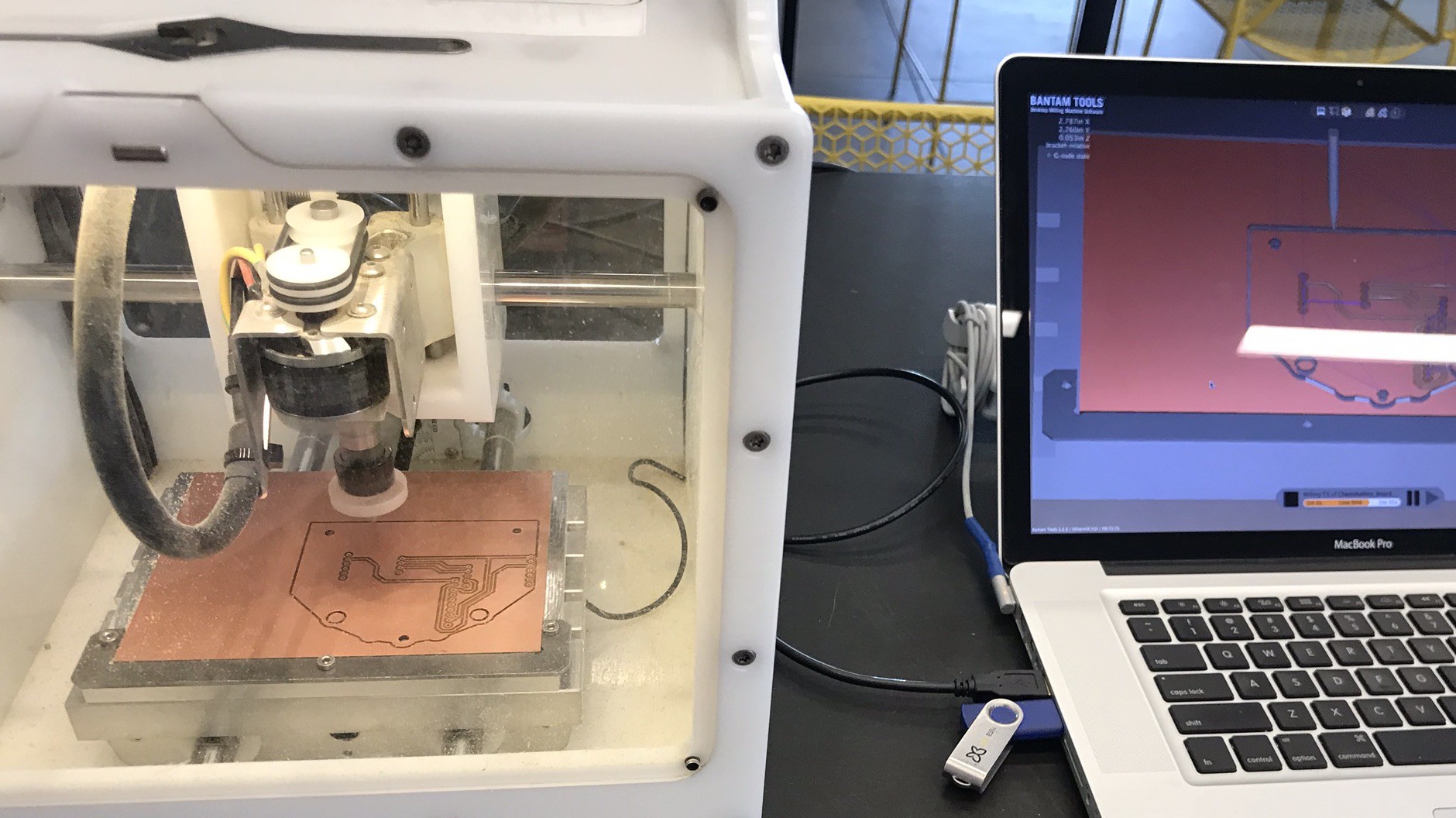
This is the mini CNC used to cut out the two sided copper boards.
4. Next some soldering, assembling the noodle stake and then tightening it down for running some test code to make sure everything was firing right. We had a few small trouble shooting details, a few swamped pin on the design and we had to touch up some solder joints. After that it was coming together nicely!
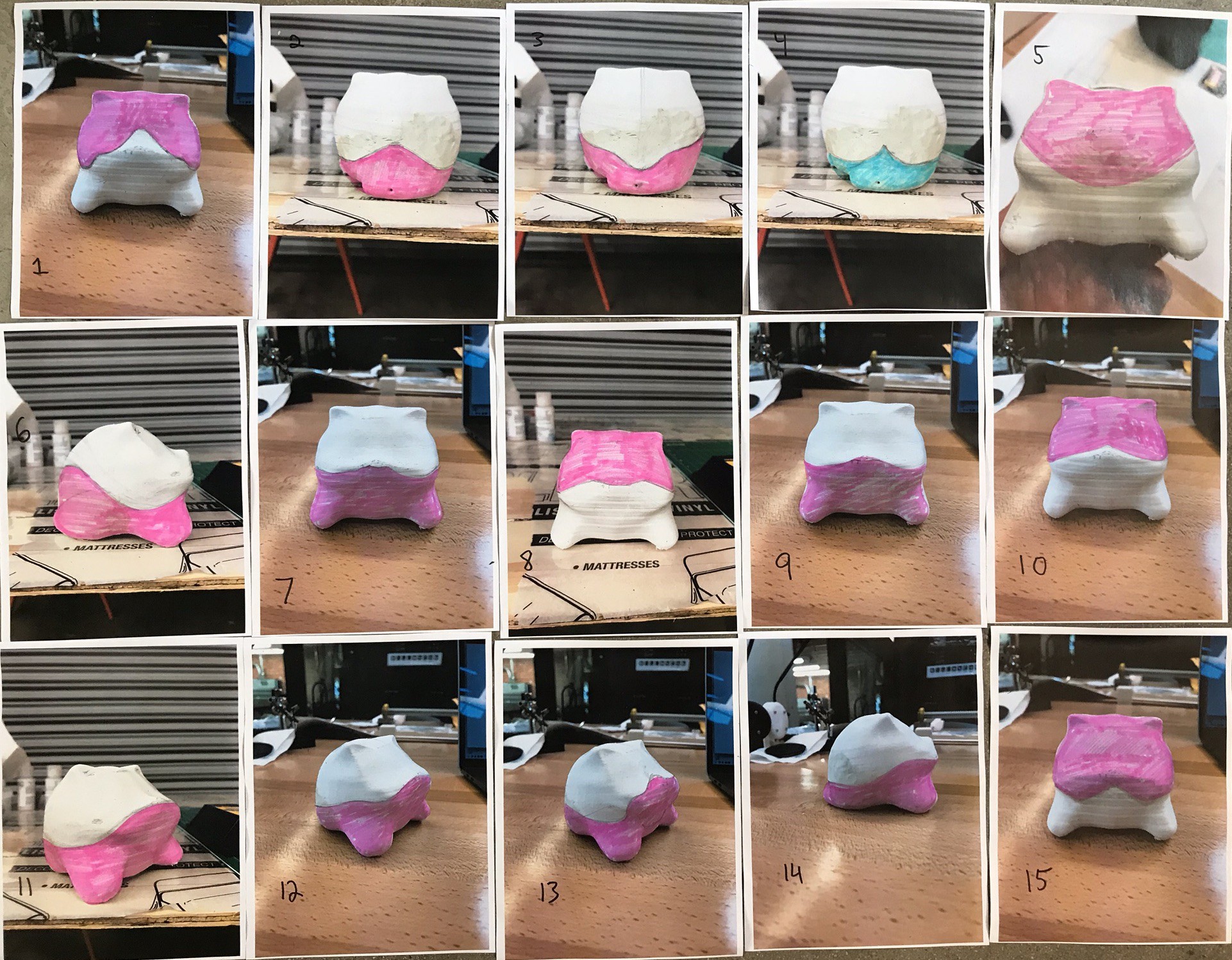
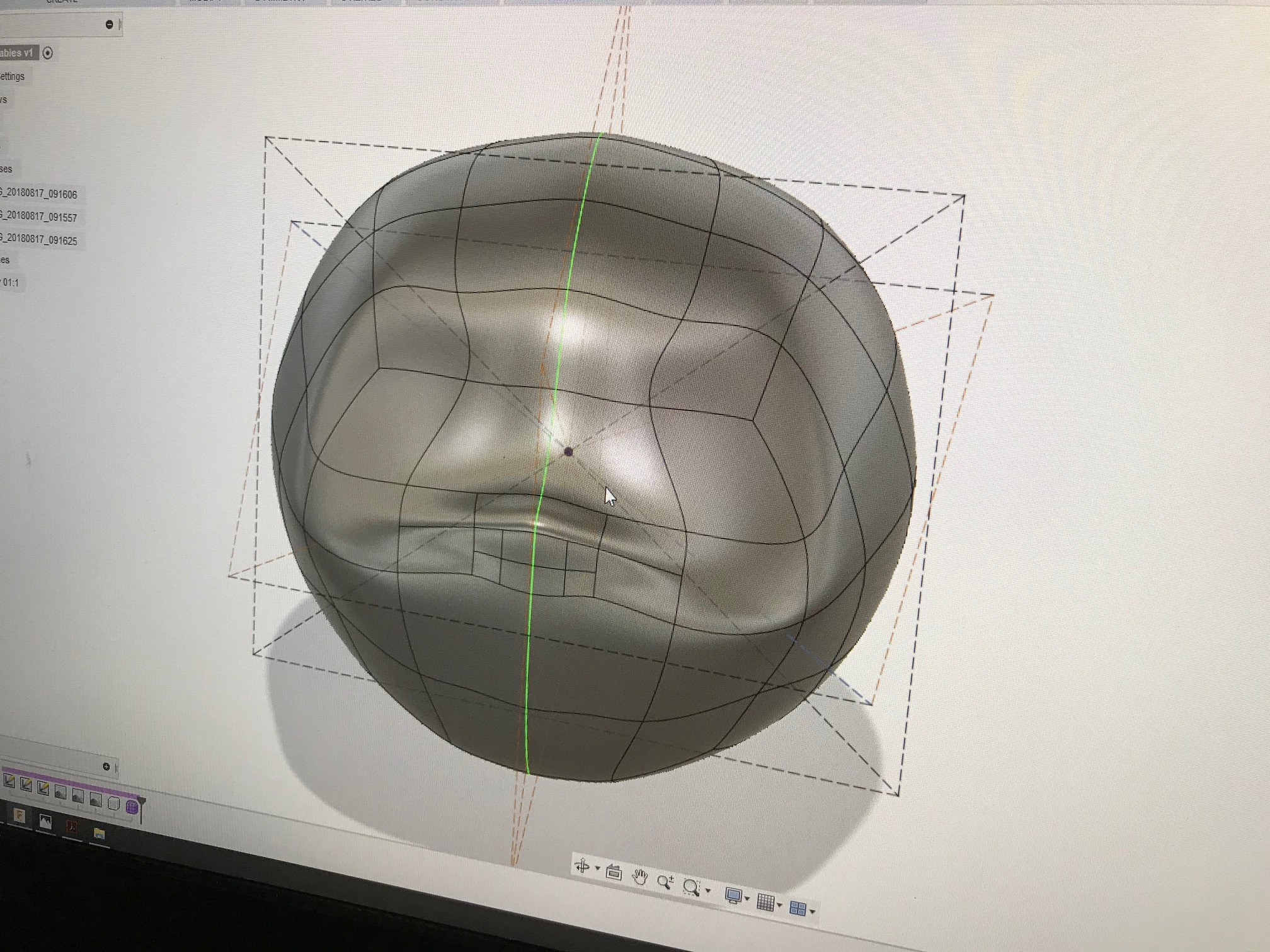
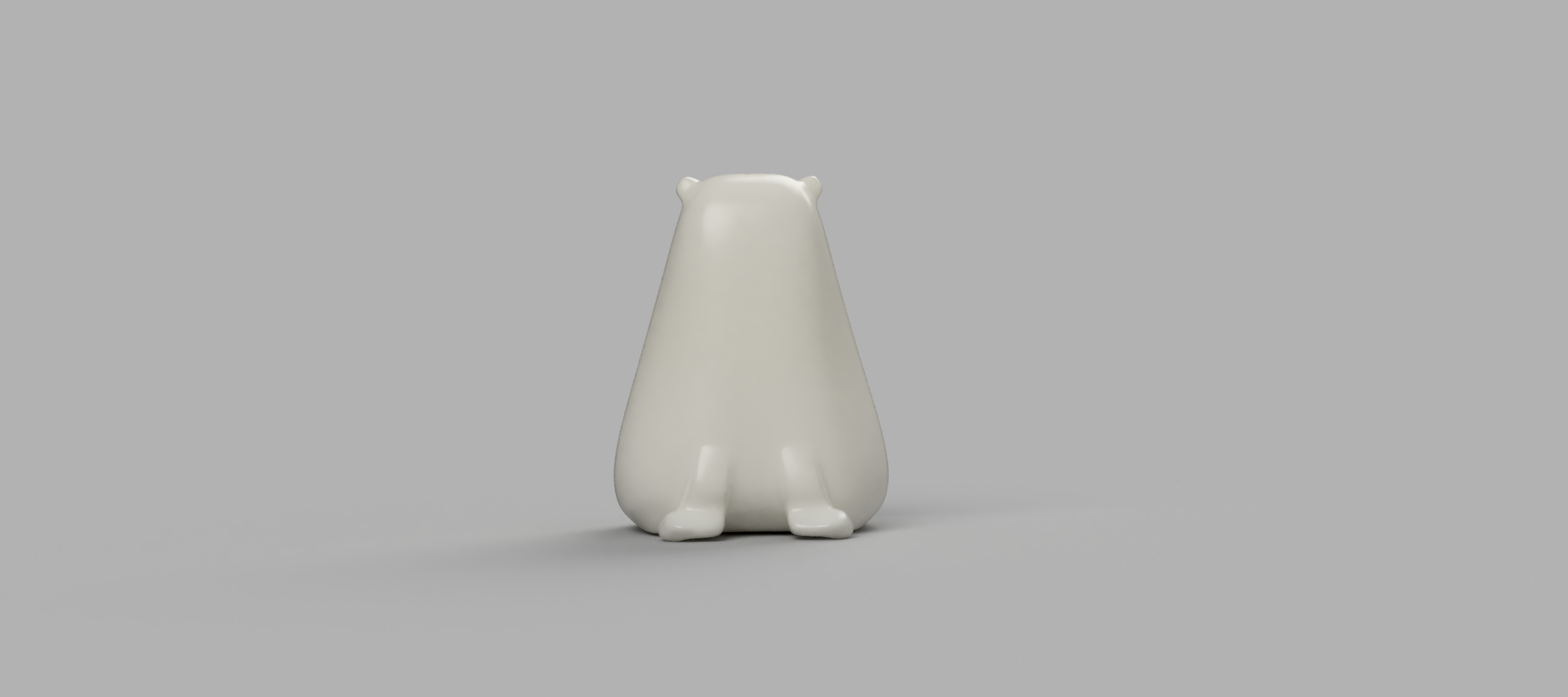
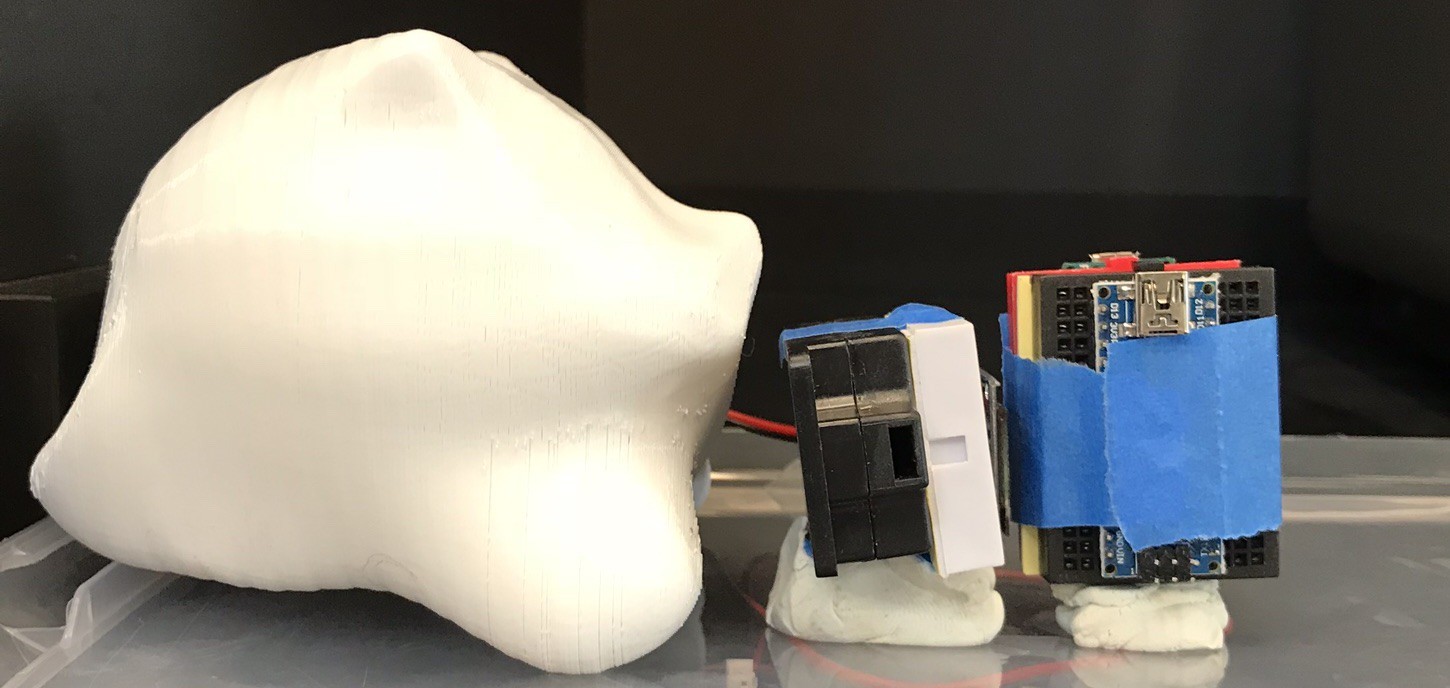
The final form has been pushed, pulled and massaged into this kinda abstract kitty head with legs.
Below is few key images highlighting the process.
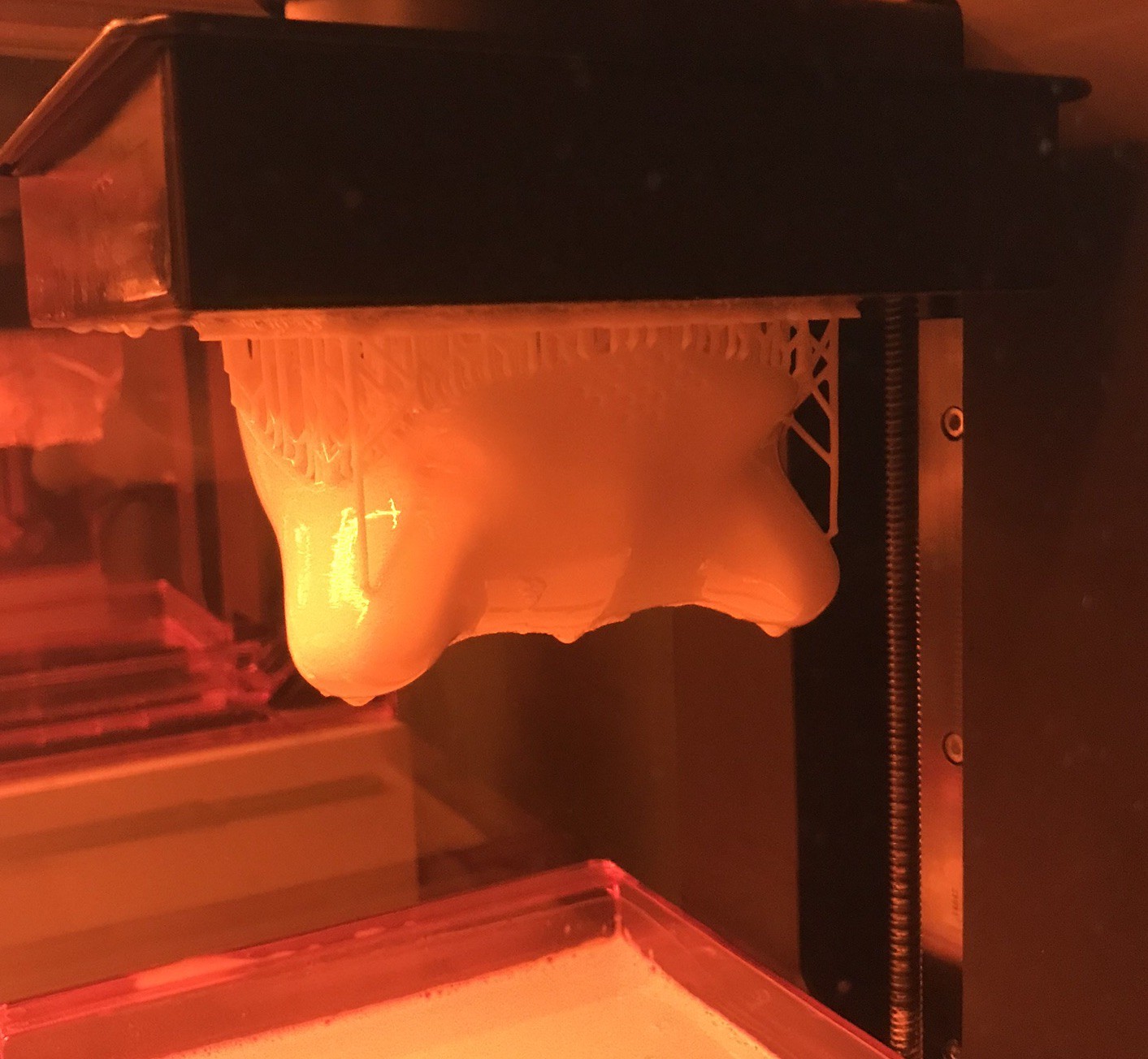
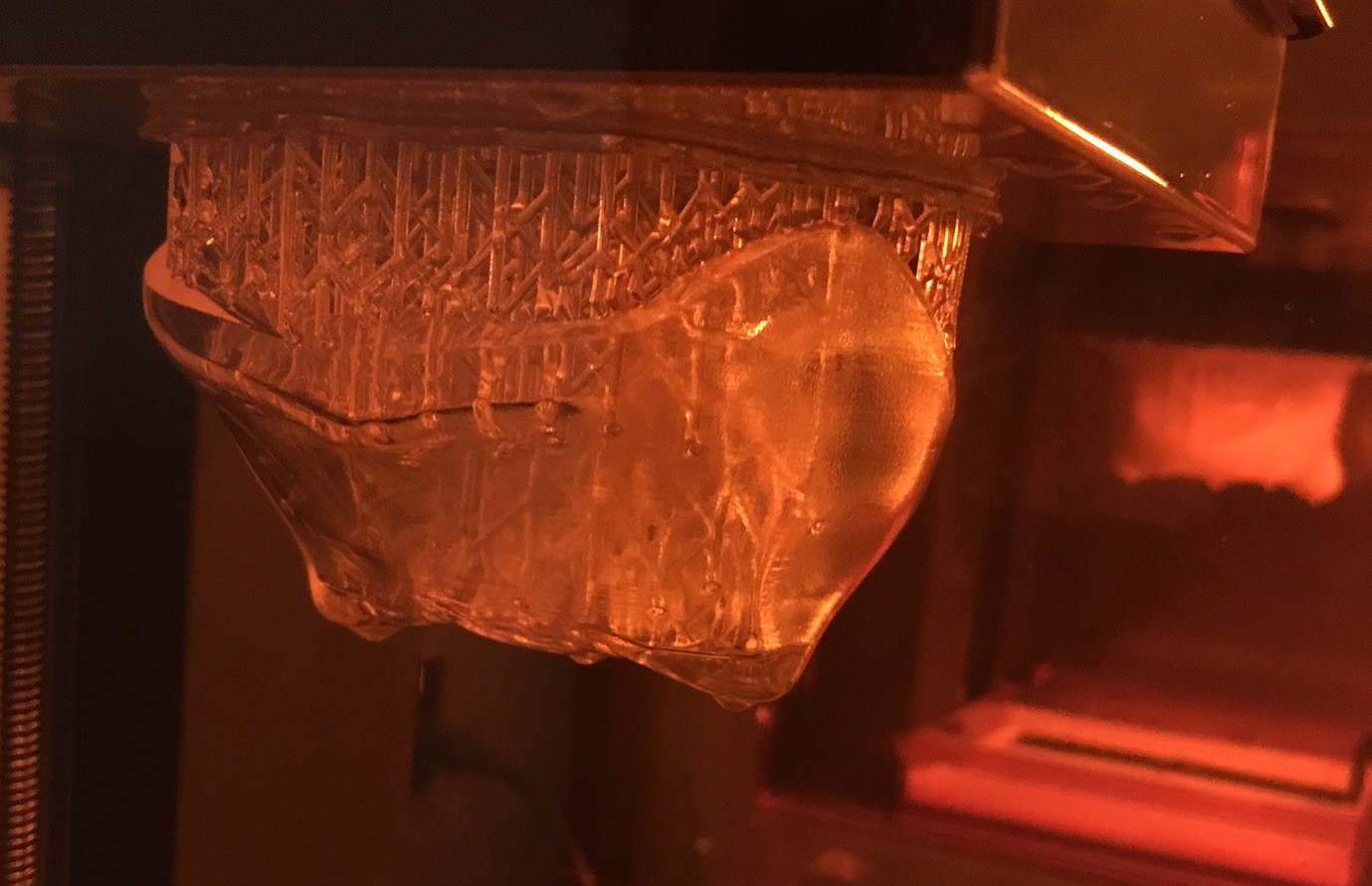
We printed this with a transparent top to help aid in the cram job we anticipated for all the hardware to fit.
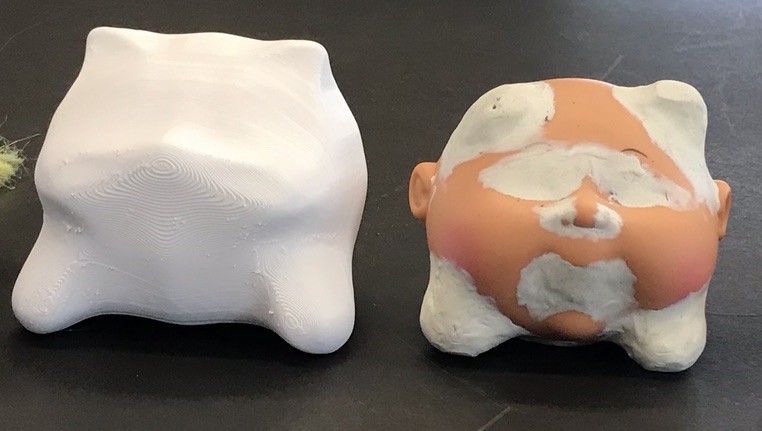
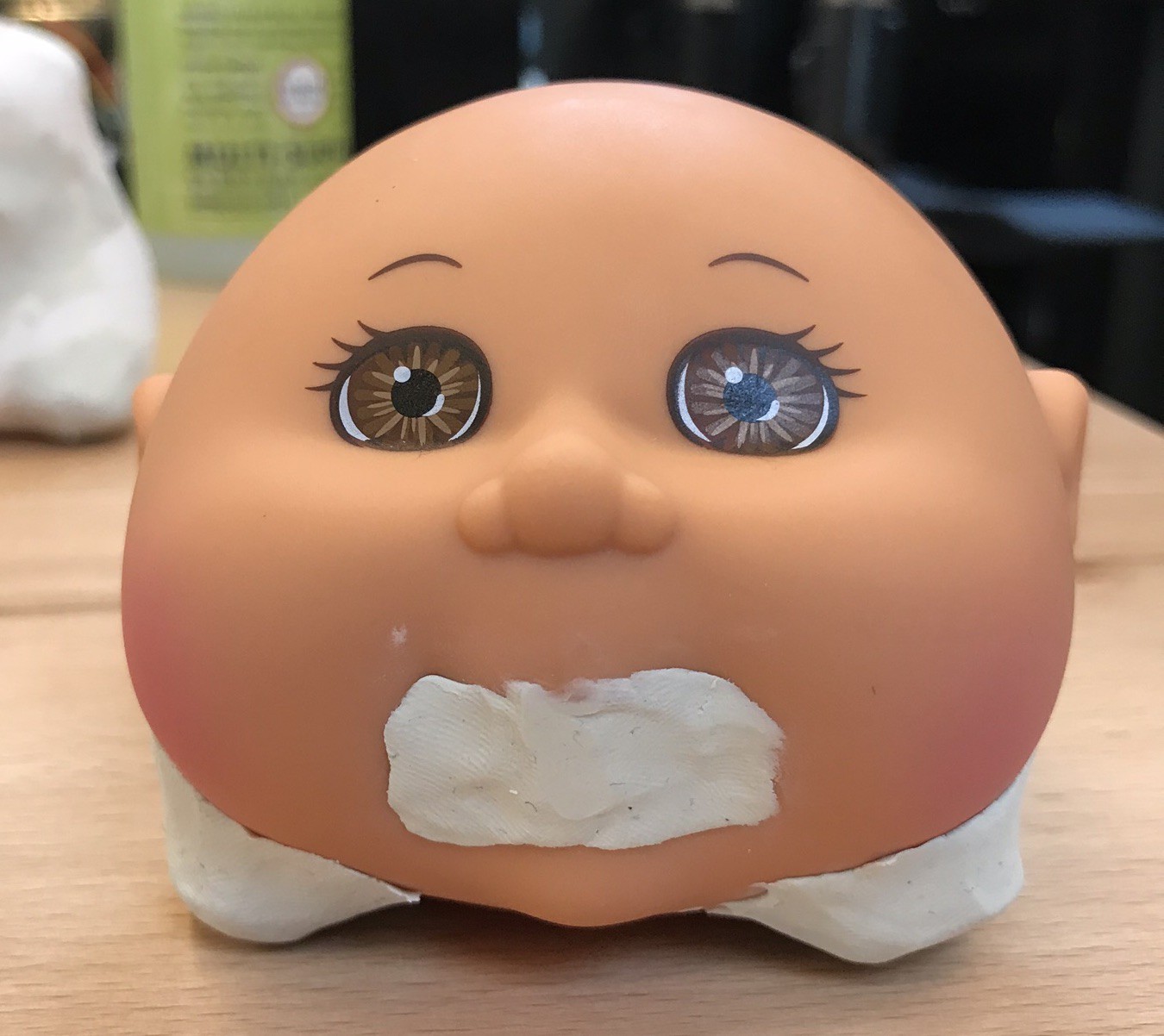
Cabbage head to kitty-ish head.
Our kitty WillowB approves.
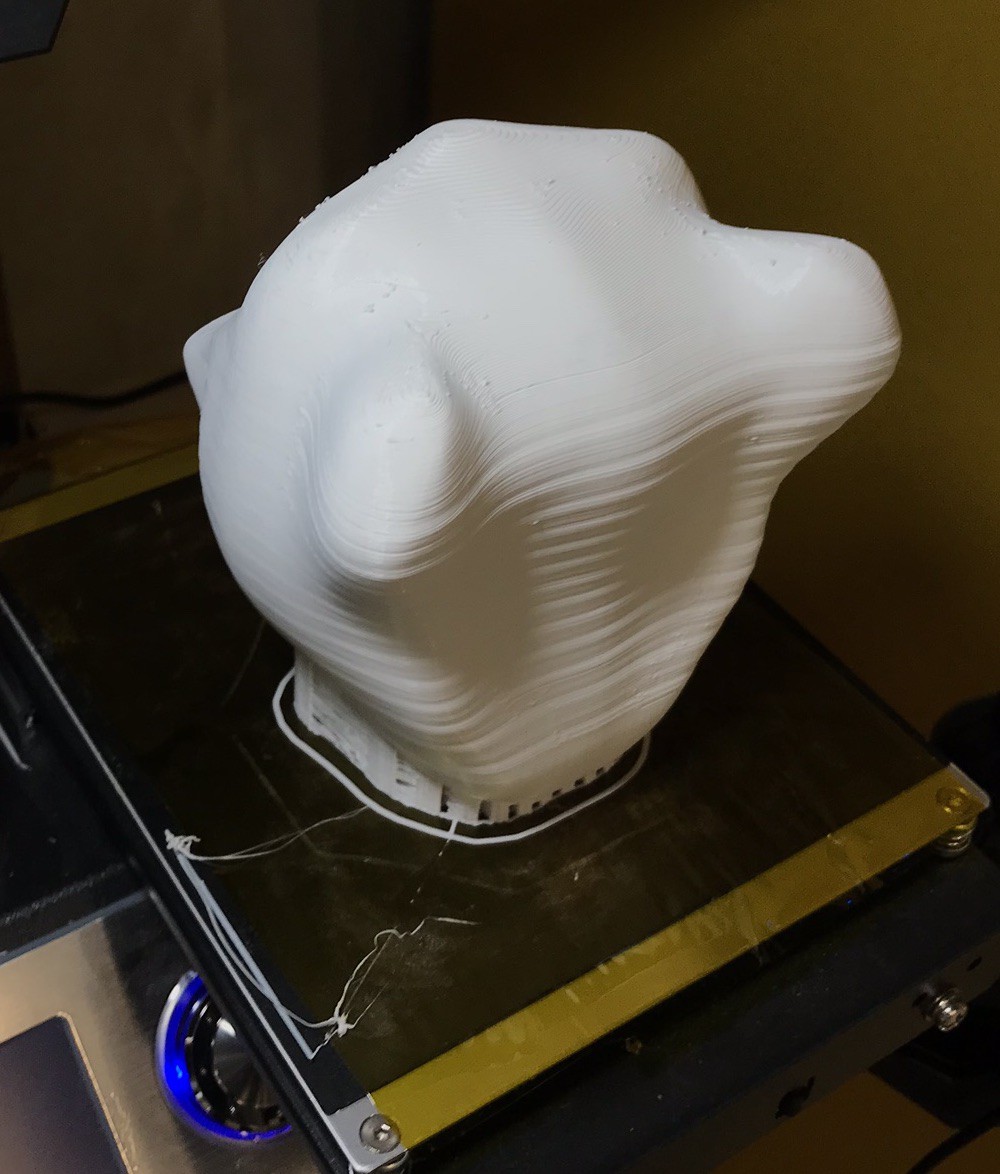
Maximizing print size on the table.
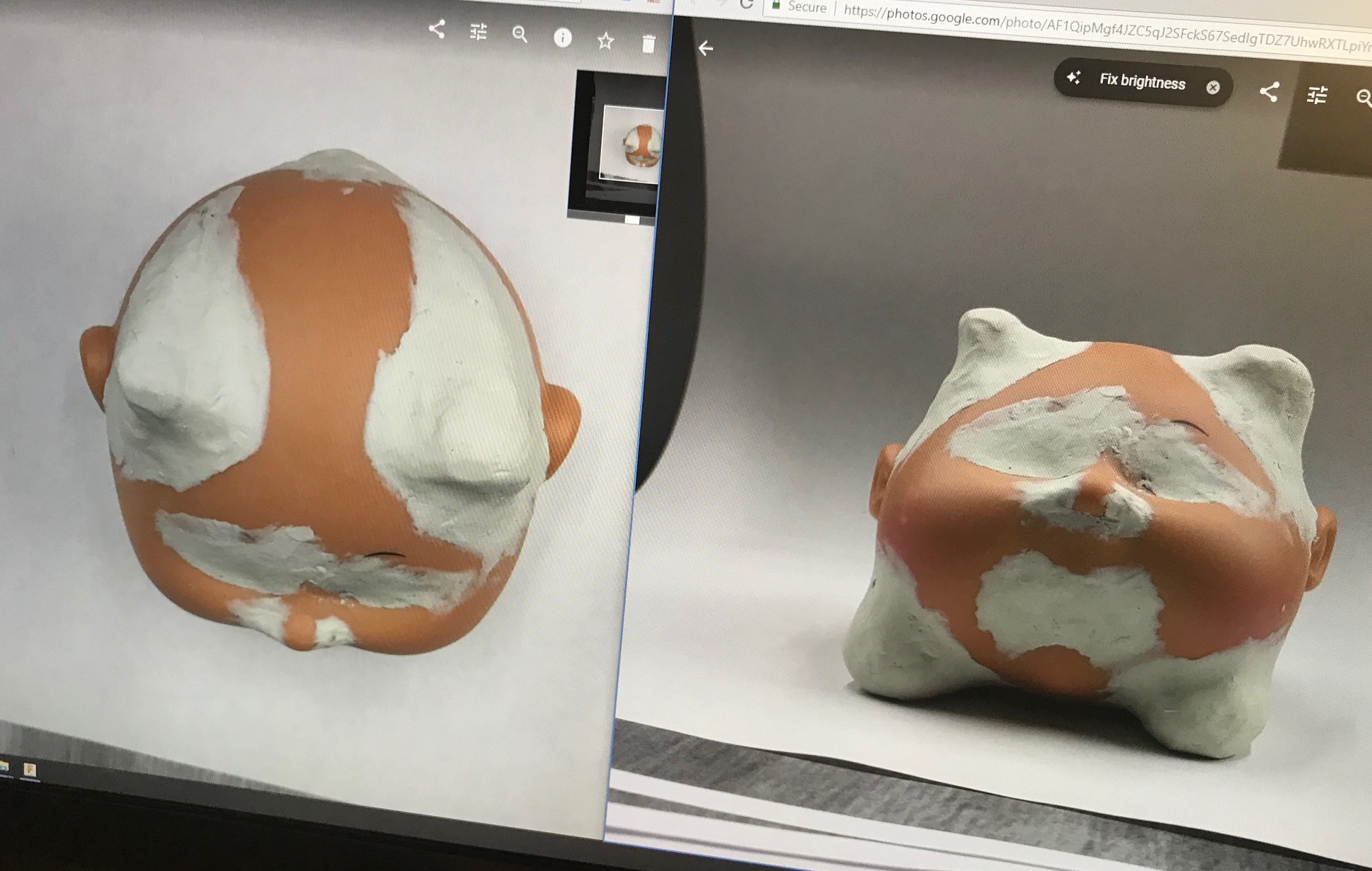
This is a parting study for the two halves. Are main consideration is to make it easy to fit in all the hardware, chassis, and components. Aesthetics is thought about in tandem.
Bottom part right side up with the FormLABs printer. I am thinking west world right now.
Top part up side down.
The parting solution on the left proved to be better fit.
We have split the last week or so into a few tracks.
Track 1: Building out more Interaction and behavior assets.
We are refining the vibration based behaviors with the motor rig tool, continuing to refine the gestures based algorithms, and collecting some sounds bites for reinforcing the over all mood or cattitude ; think hissing vs. happy meow sounds.
Motor rig tool with 7 motors.
Track 2 : We have been working on a field guild document for the play experience and acting out a few scenarios to understand the logic paths. At its core we are simplifying an intro experience to something like how if feels to pick up a Cherishable for the first time.
Track 3 :
We are giving the form another round of design to hold the hardware and refine the aesthetic.
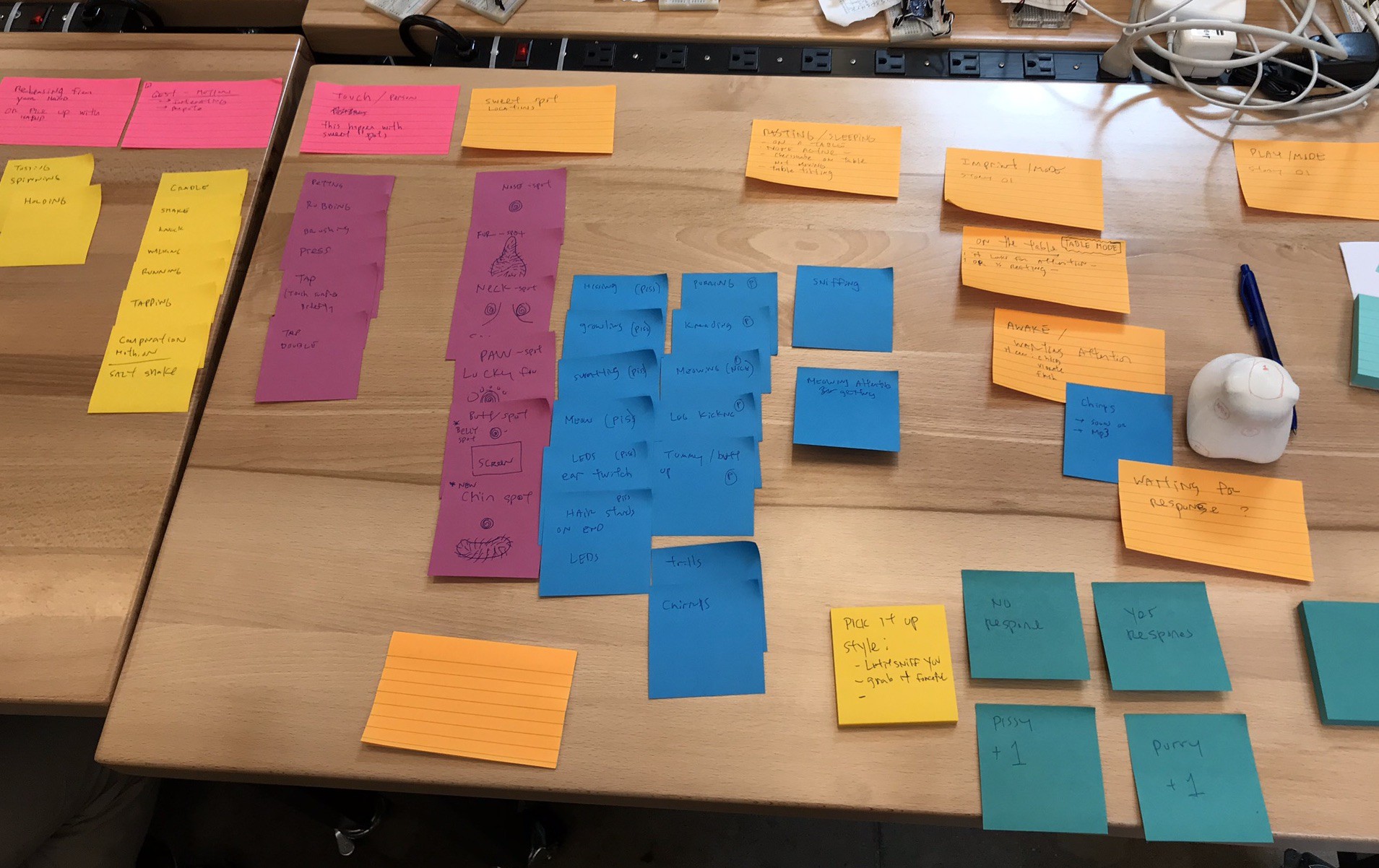
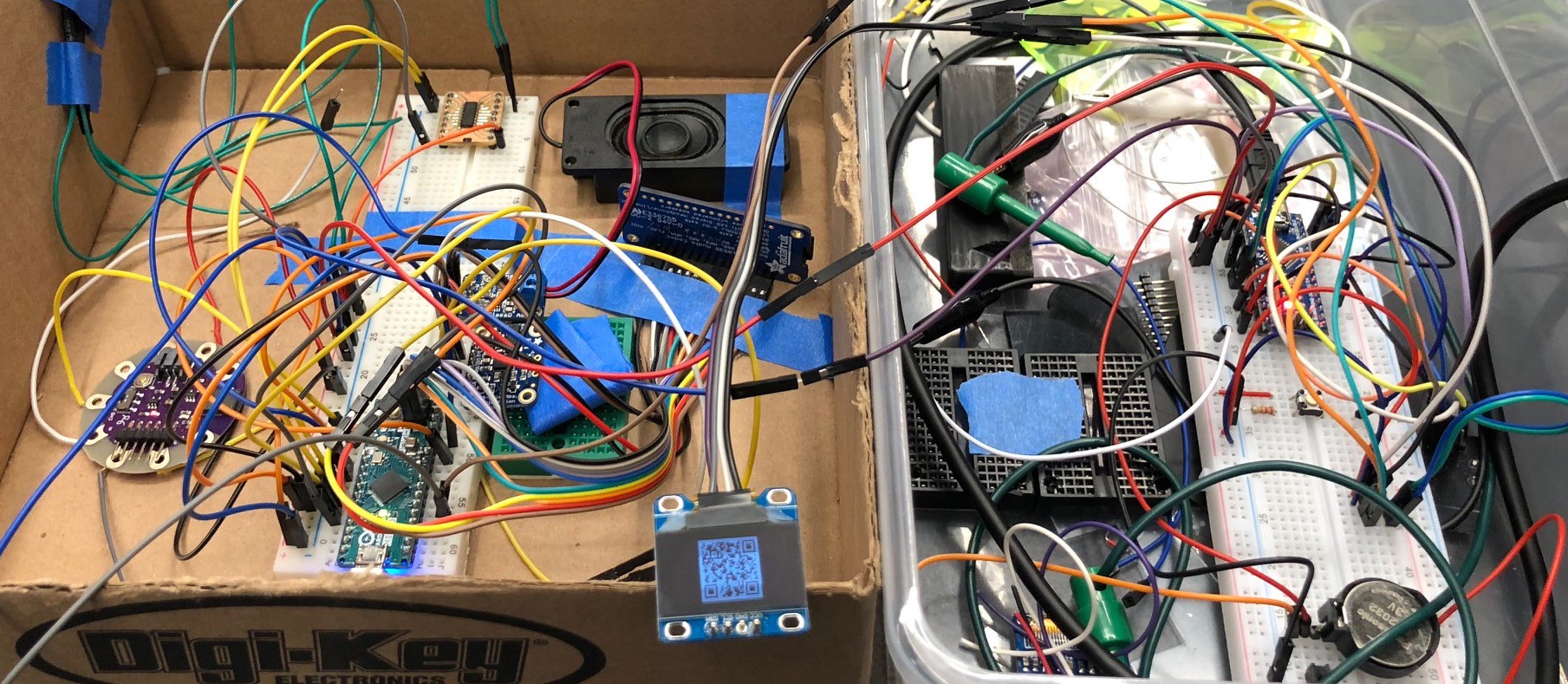
Gameplay with a Cherishable starts with picking it up. the way in which a player holds and interacts with a Cherishable has a huge impact on Cattitude. gentle holding and rocking is soothing, and helps calm a wily cat, while rough, shaking, movements can turn a gentle cat pissy in no time flat. But, how will the device be able to "sense" these different interactions.
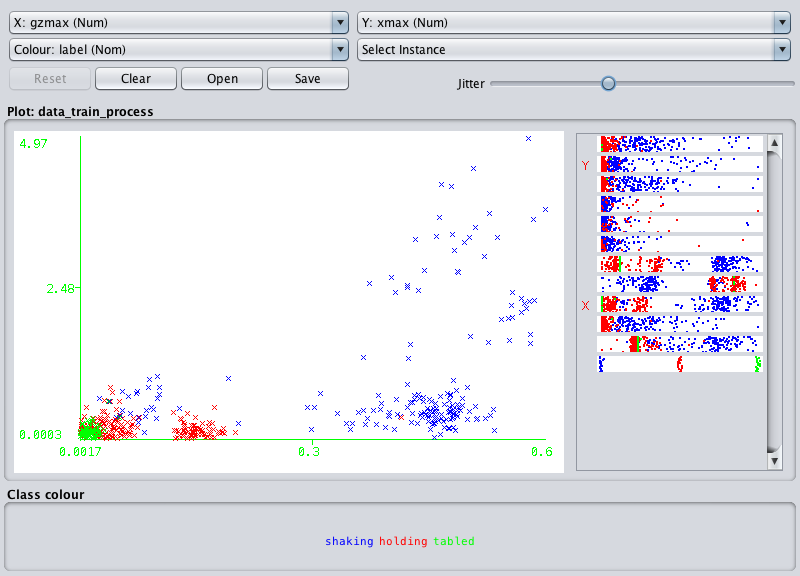
We resurrected an old tool that allows us to record data from a motion sensor, tag it, and do some machine learning magic to build n algorithm to detect different motions in real time. It's based on an RFDuino, and has a BNO055 motion sensor from Bosch. A companion app was made for a mobile device that would help in tagging data for specific motions. In this case, we started small and only focused on holding, shaking, and resting on a table. Our first attempts have been met with failure, and we suspect our feature section and creation needs a bit of work.
See how the Green and Red are all mashed up together, and some blue is leaking in as well? Need better features that will spread things out. Gotta keep em separated.
In our process of looking at different actuations we decided that using motors for vibration would be one of our main resources for defining different behaviors. We purchased this motor rig to help with the process. It has several default options and motor types we tested out. The results revealed some interesting ideas.
At the core a Cherishable becomes a new type of companion. One that understands you are it’s friend, parent, or care taker, some one they can trust and rely on. Basically your Cherishable’s attitude, is either content/happy? or more upset/scared?. These are the type of questions we are answering.
We decided that low intensity vibration, similar to a massage when holding a Cherishable would represent the content/happy side. On the upset/scared side, high intensity vibration would be hard to hold and you might feel like letting it go, or observing it from afar
We are also considering motor vibration as a way to physically moving the object around a bit (like a bristle bot). Vibration pulsing and sequencing could cause it to rock back and forth or move around a surface. Lastly in considering the Cherishable materials and shape we could create interesting sounds when placed on table top. For example if the object was rigid like a hard plastic or metal the internal motor vibration could create a sharp noisy effect. If we used a soft rubbery like material the sound could act more soothing to the ear.
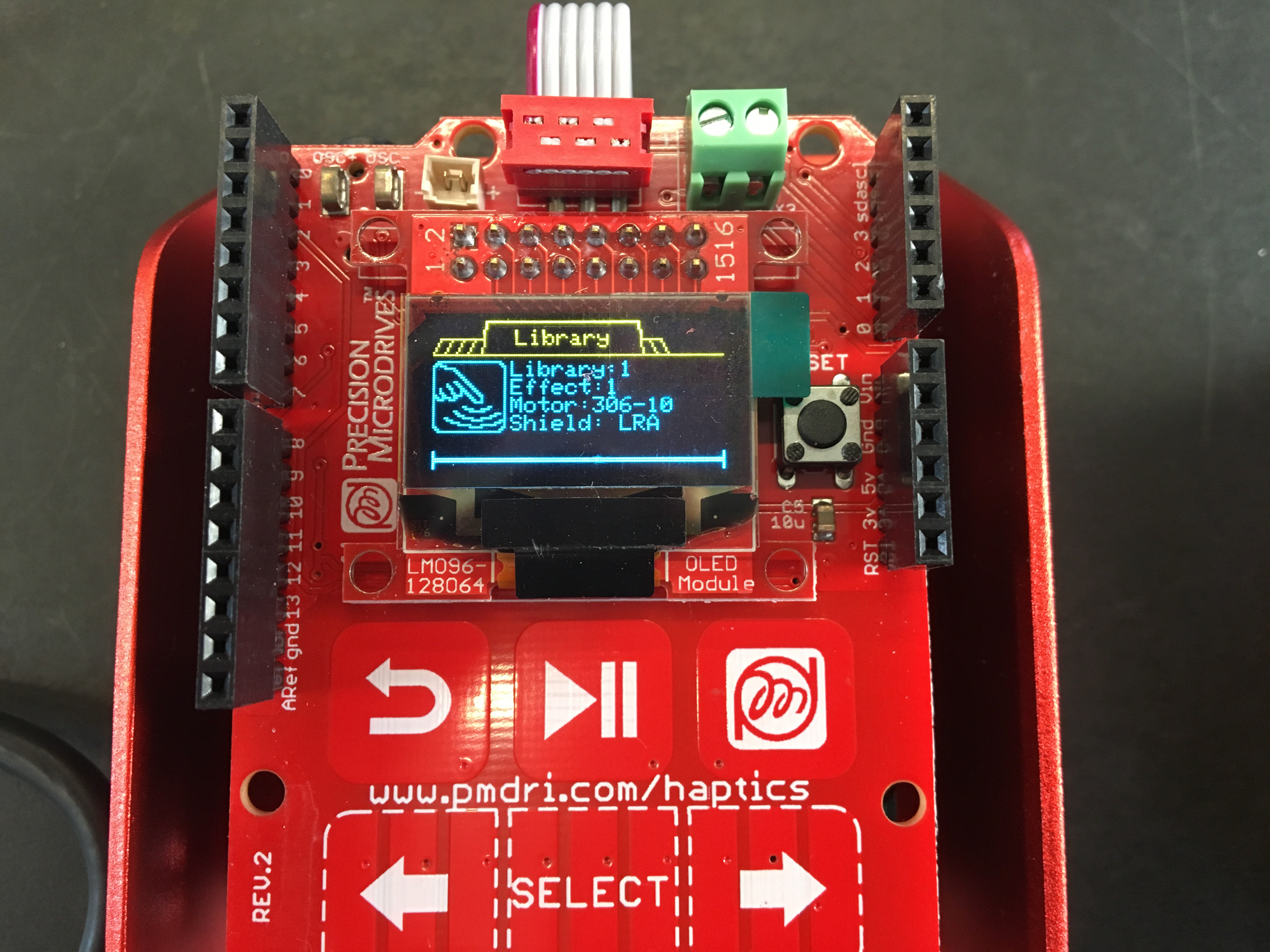
We received our Precision Microdrives haptic feedback development kit. I know, you're as excited as we are. This is a great little kit that contains haptic motor controllers, and handheld device with a sampling of different motors. You can sample many, many different haptic feedback vibrations from clicks, to ramps, to funky buzzes. We will be spending a good amount of time with this kit to design our vibrations, and sequences of vibrations.
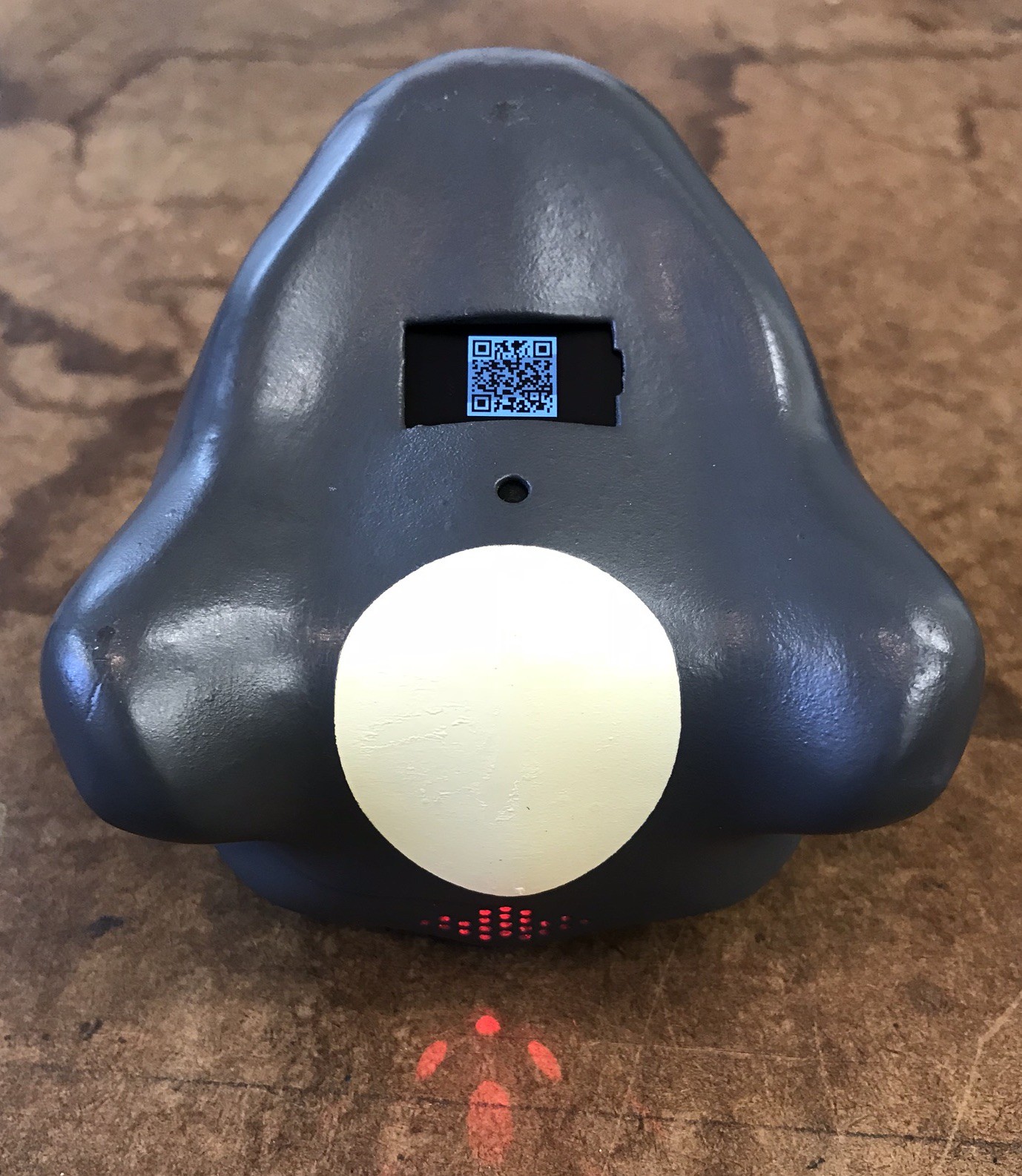



 Final paint.
Final paint.
 It kinda needs to be in this shape on the right, a stack or brick design can work.
It kinda needs to be in this shape on the right, a stack or brick design can work.