 deʃhipu
deʃhipuI haven't written an update in a while, even though a second version of the PCBs already arrived, and the laser-cut parts work very well. The reason for that is: I was struggling with power problems.
For some reason on the new boards CircuitPython goes into a safe mode due to a power dip, and has to be physically reset to continue operation. This is caused by a "twitch" of servos when they get powered up initially, before they get any signal. This is very surprising to me, because previously I have built robots with exactly the same power distribution and with even more servos, and there was never such a problem. Oh well, so I got to figuring it out.
First, the 3.3V line voltage on switching on looks like this:
You can tell it's not great — it goes up to around 3V, then drops to 2.5V and slowly ramps up to 3.3V. This is probably the twitch of the servo motors overwhelming momentarily the battery. The usual solution to that is a beefy capacitor in parallel to the servos, so let's try that. I think 1000µF will be enough?
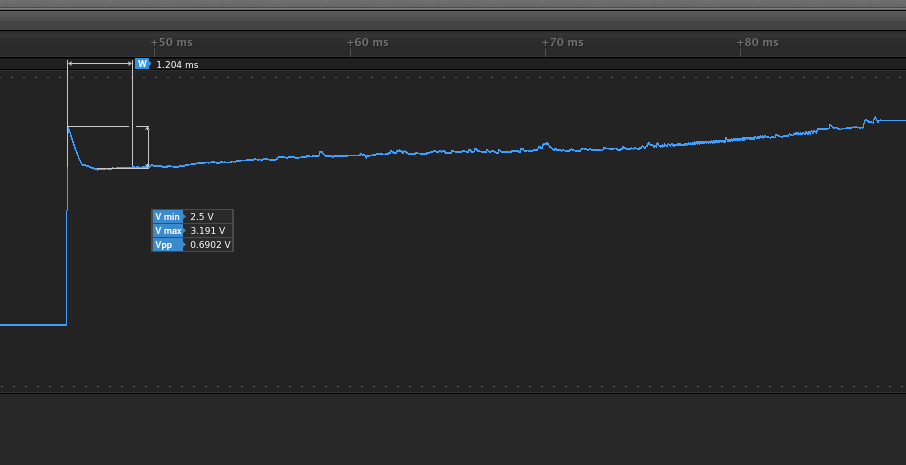
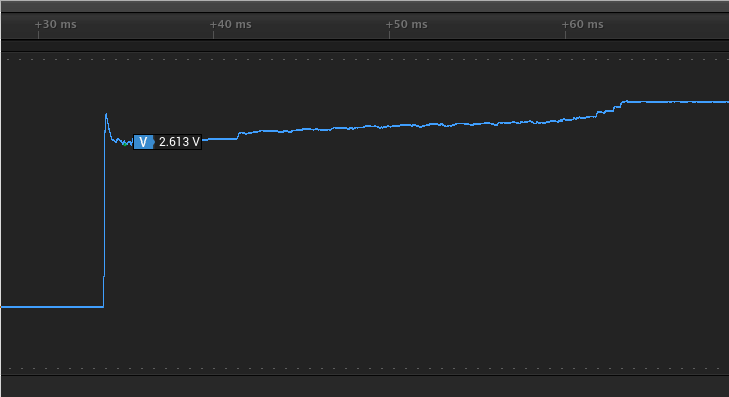
This makes the voltage curve look much smoother, but there is this capacitor charging now:
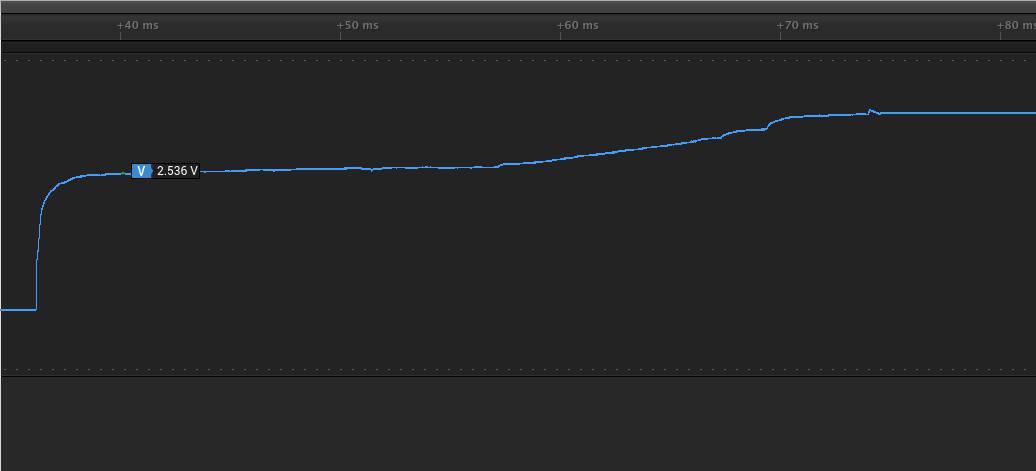
Unfortunately, CircuitPython is still going into safe mode, and I have no idea why — there is code in it that is supposed to wait for the voltage to stabilize before proceeding with booting. So I played a little bit more, tried to swap the LDO with the other, working robot, tried to add more capacitors, tried resistors on the servo signal lines, etc. — all for nothing. I noticed that with just 6 servos it works:
But that's just because the voltage drop is a little bit smaller, so I suppose it goes over the safe mode threshold.
I'm beginning to suspect that there was actually a change in the CircuitPython code handling the safe mode, and that the older robots work just because they use an older version of CircuitPython. That should be easy to verify, actually — let's try older version. The working robot uses 5.0.0, so let's try that...
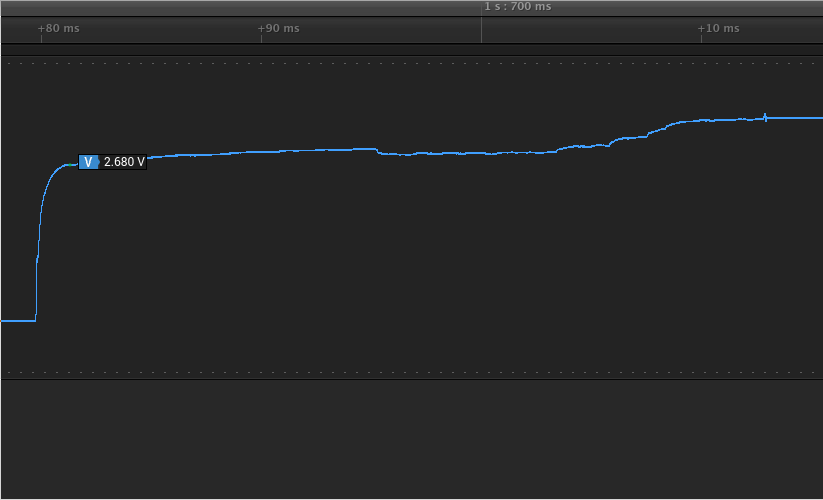
An nope, still goes into safe mode. So what makes the good robot good? Maybe we can look at its voltage curve? Let's see:
Hmm, so it's the same bad curve from the start, only the voltage doesn't quite dip as low. Probably just better quality servos, I suppose?
I will keep working on it and keep you updated.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.