 deʃhipu
deʃhipuIt's been a while since I worked on this — I've been busy with #PewPew M4, though I did update the #SpiderWing and test the battery protection circuit there. But I never finished the SAMD51 version of the PCB for Kubik M4, and it has been on the back burner.
Most recently, however, I realized something: the Kubik M0 PCB doesn't have to be a failure after all. Well, of course, if I wasn't terribly lazy I could write a servo library for the CircuitPython that handles 12 servos with a timer interrupt and use that — the microcontroller is easily fast enough to do it — but that would require effort. But I thought about something else: I have a version of the walking quadruped that doesn't need 12 servos — #Katka, a mammalian robot only needs 8. Sure, turning is a bit of a challenge, but I could totally re-use the Kubik M0 PCB to build a Katka M0. So I went ahead and did it:
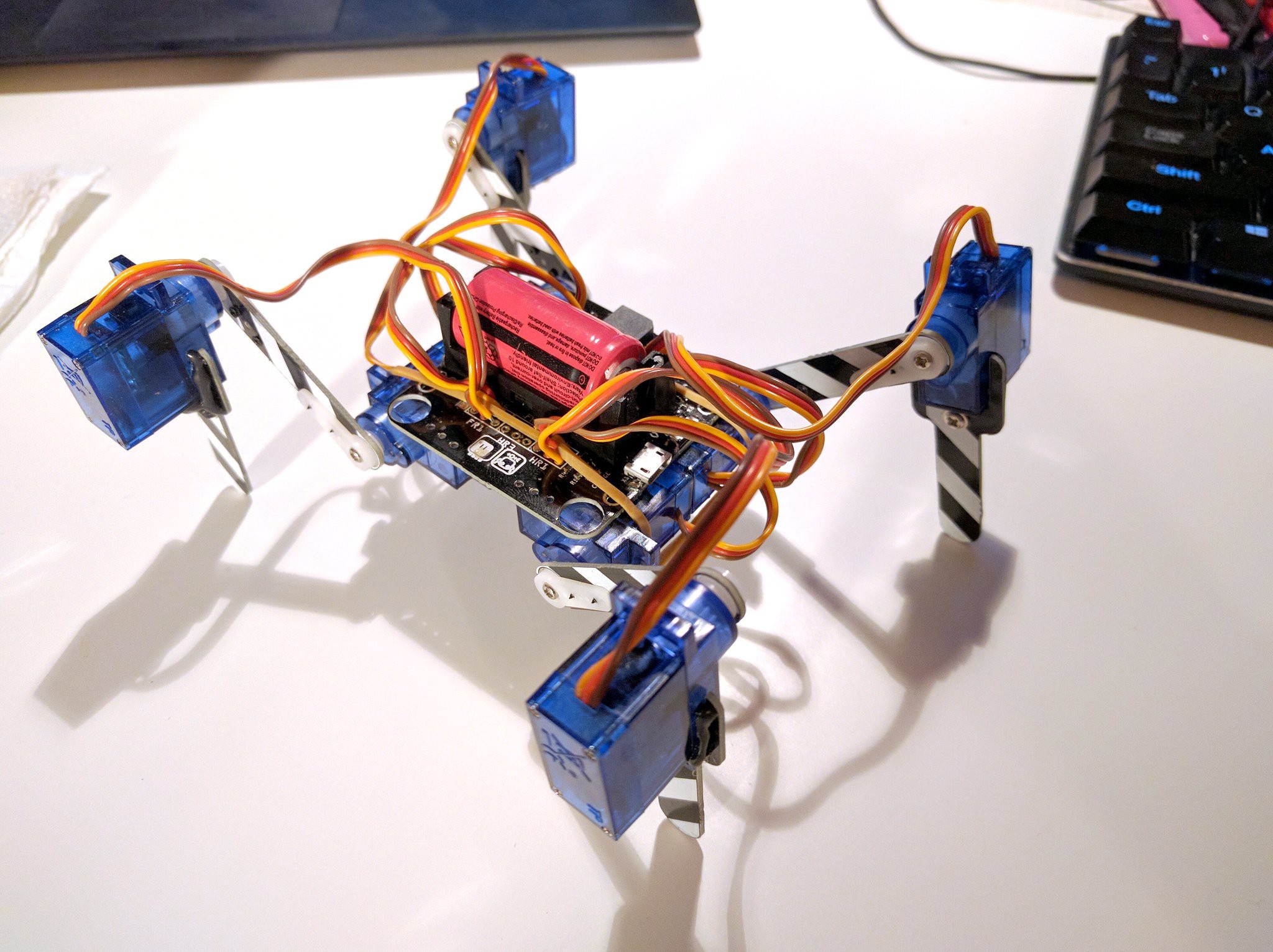
The four hip servos went away, and I instead attached the knee servos directly to the PCB, making them the new hips. I think I will try to program it to walk in the configuration shown on the photo, even though it could also easily walk in a more mammal-like posture, with the knees below the hips. But I want it too still look a bit like a spider or insect, so I will go with this.
Of course I can't re-use the code I had for Kubik anymore, so I will also get to re-write the whole walking thing in a cleaner way, possibly using async functions. The inverse kinematics should now be much simplified, and also the cost of the whole device dropped by roughly 1/4 with the removal of the servos. If I can find a reasonable way of turning, then I'm going to go forward with this (re-designing the PCB for easier attaching the servos in this configuration, and adding the battery protection I tested with the Spiderwing).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.