 Dennis
DennisAs the cost of solar energy continues to drop, more home owners across the country as well as across the world are installing grid connected PV systems. And as micro-controller power requirements have also decreased, energy harvesting for projects as well as remote equipment is also on the rise. Solar is a great choice for many of these applications. It is a great trend, replacing the use of fossil fuels with clean green power.
Problem:
Although the use of solar power is increasing, many locations still cannot enjoy the benefits of solar energy due to obstructions such as trees, landscaping and so on. Many of these locations have areas that receive full sun light for a short period of time during the day, but as the sun moves across the sky, these areas also move.
Solution:
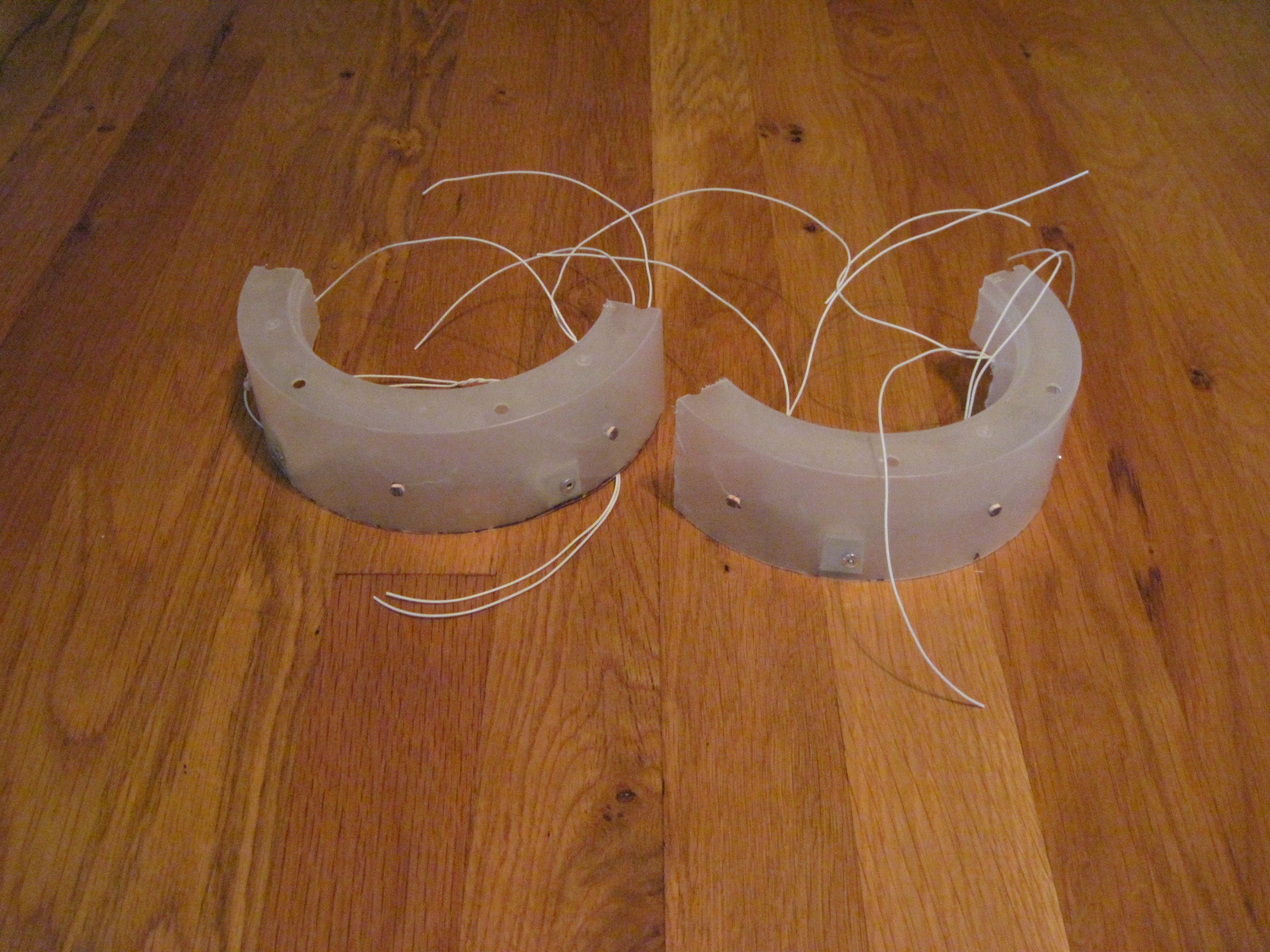
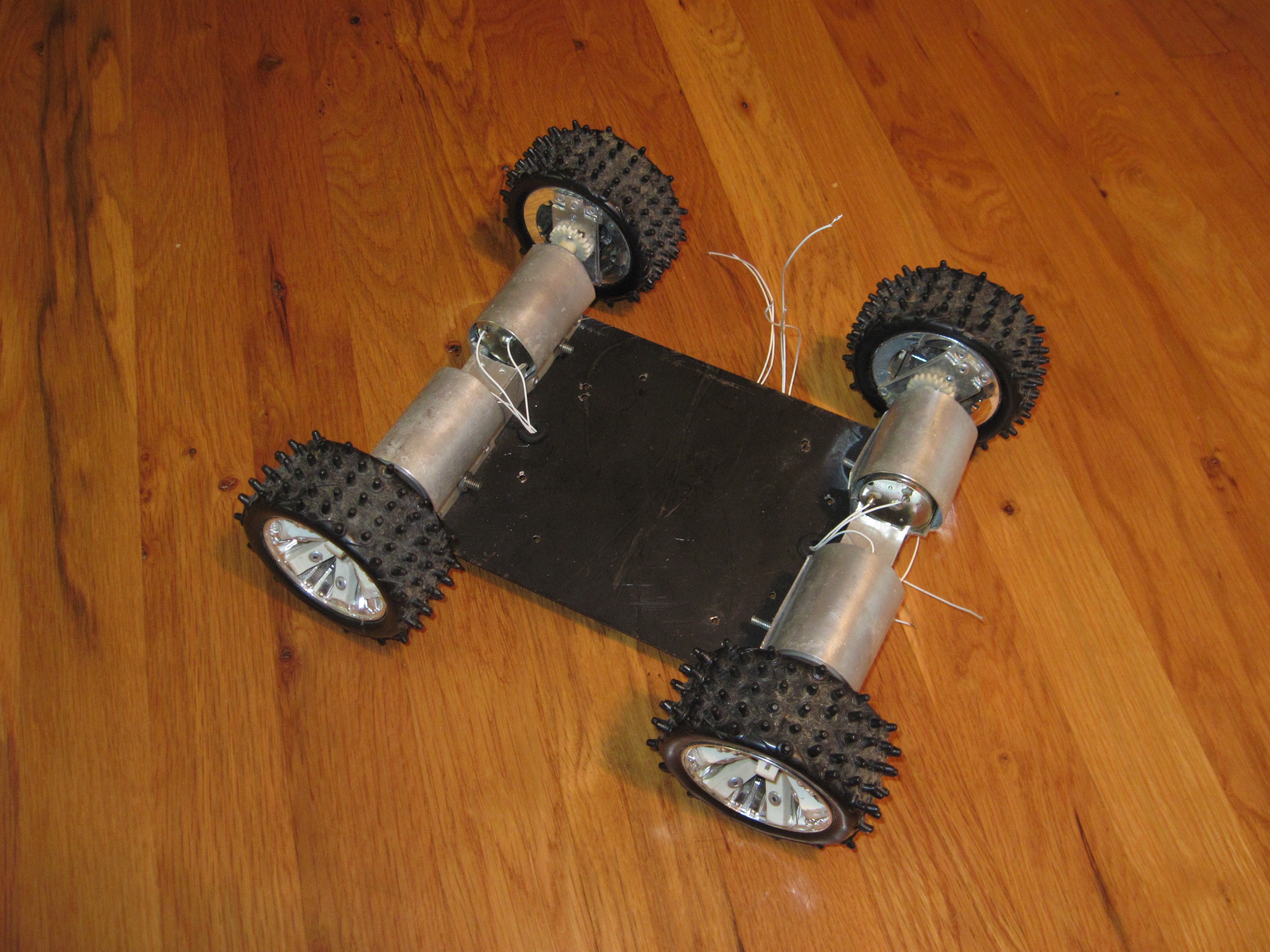
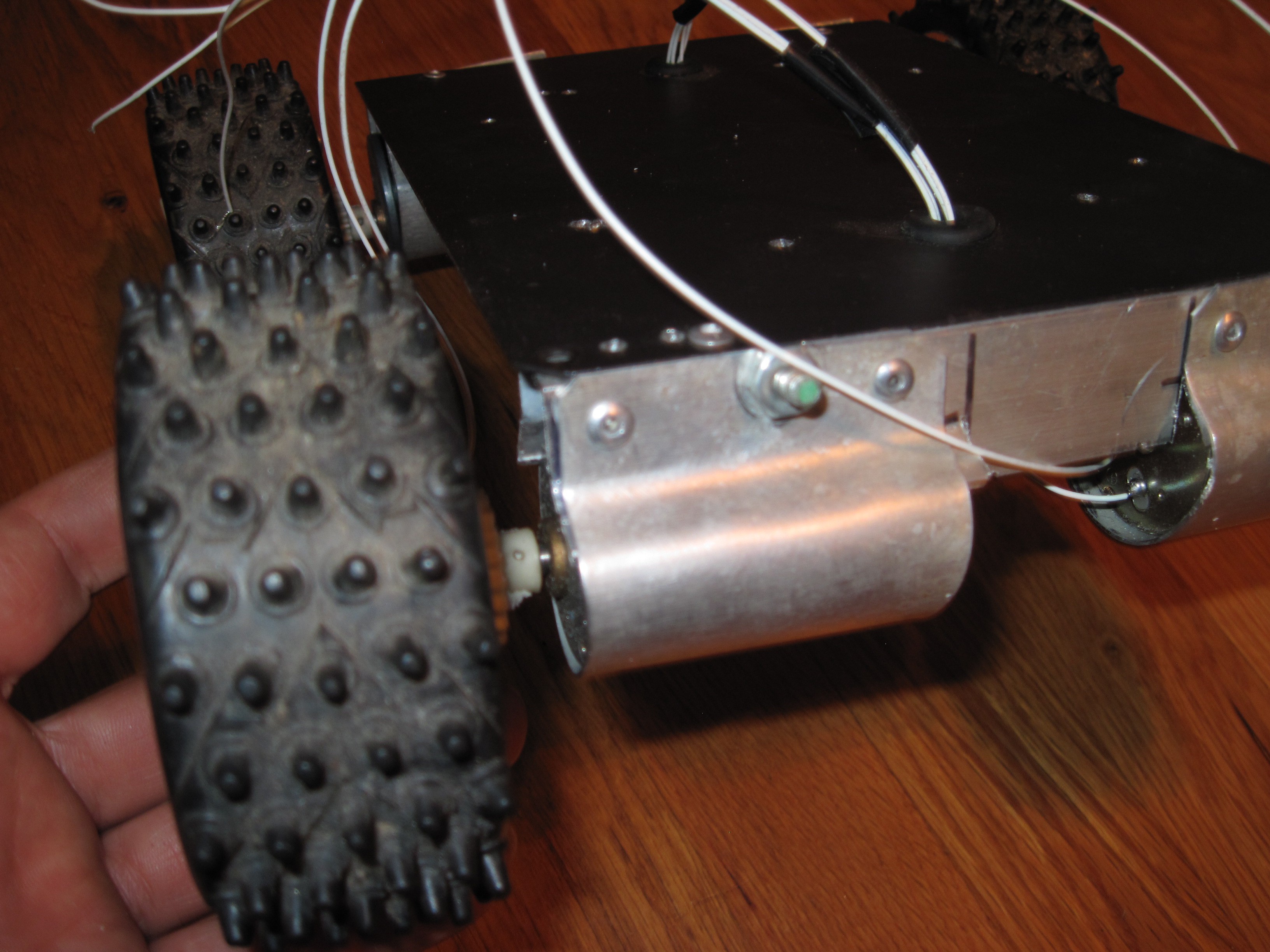
Sun Chaser is an open source mobile robot with a motorized solar panel mounted on top. Sun Chaser’s main purpose in life will be to find the brightest sunlight within a set of GPS coordinates and position its solar panel toward the sun and charge its on-board batteries. Sonar will allow Sun Chaser to avoid objects, and GPS will prevent Sun Chaser from wondering off to some far away location. Six photo resisters positioned around two curved surfaces on Sun Chaser will be used to detect the direction of the brightest light. This will allow Sun Chaser to both find the brightest light and stay pointed toward the sun. The top-mounted solar panel will also be able to tilt to obtain the most light possible.
All of Sun Chaser’s motors and sensors will be handled by a Squid motor control board. A Raspberry Pi will also be on board to provide an on-board website to allow the owner to communicate with Sun Chaser and also to allow a docking station to communicate with several Sun Chasers through a WiFi network.
After Sun Chaser has charged it’s on-board batteries, either Sun Chaser can dock with a docking station to deliver its power to a stationary load such as remote equipment or a home, or the owner can individually remove batteries from Sun Chaser’s battery compartment to power projects, phones or any gadget that can be powered by a lithium ion battery.
Sun Chaser’s light tracking test.







 Jim Heaney
Jim Heaney
 ASHUMHRPROJECTS
ASHUMHRPROJECTS
 Tom Farnell
Tom Farnell
what happens when the sun goes down?