 lion mclionhead
lion mclionheadThe original vision was a big UNIX box sitting in the middle of a living room, like an Onyx 2. Some of the early UNIX boxes might have been designed as pieces of furniture. It would contain all the media the lion kingdom ever had, on some kind of 200GB internal disk. Optical storage became cheaper & more reliable than hard drives in the late 1990's, so the plan shifted to a giant robot which would make thousands of disks behave like a slow hard drive.
The robot was originally supposed to load the disks into a desktop drive. Commercially produced robots of the time did it for a lot more money & much less capacity. The lion kingdom thought it could save money by relying more on machine vision & wood. As the problem grew in complexity, the robot was pared down to just an organizer.
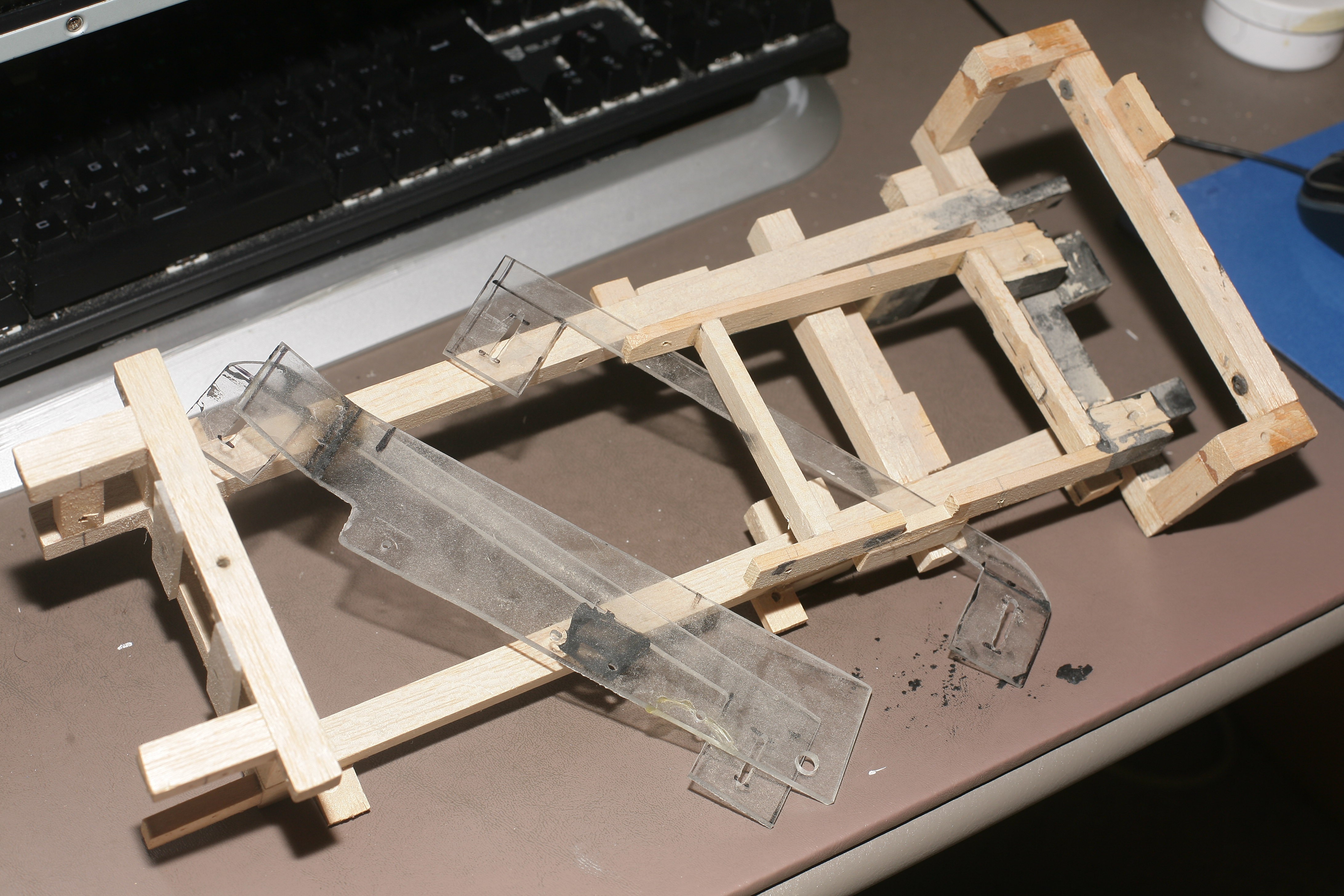
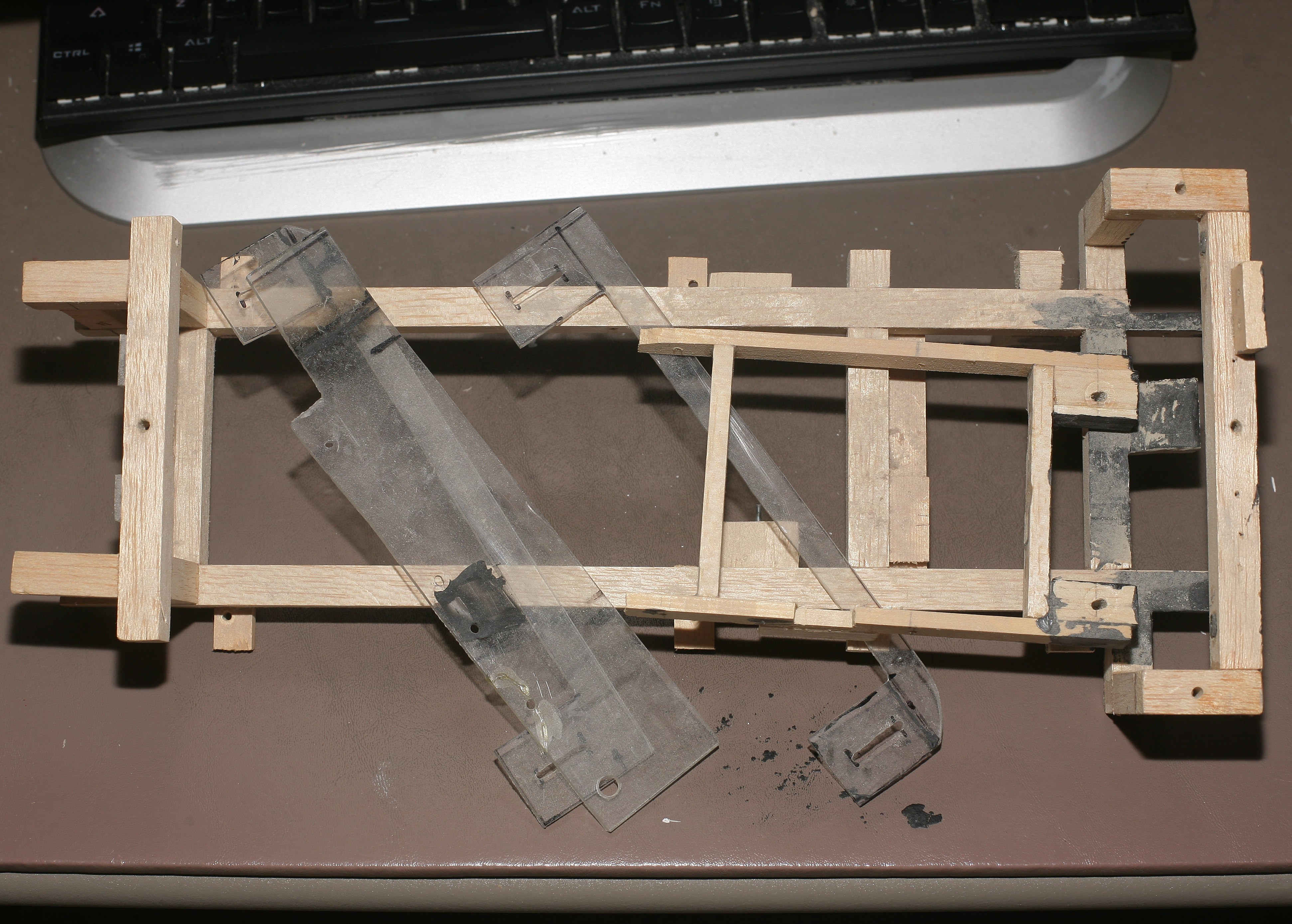
The robot was built twice. The 1st one was made of balsa.
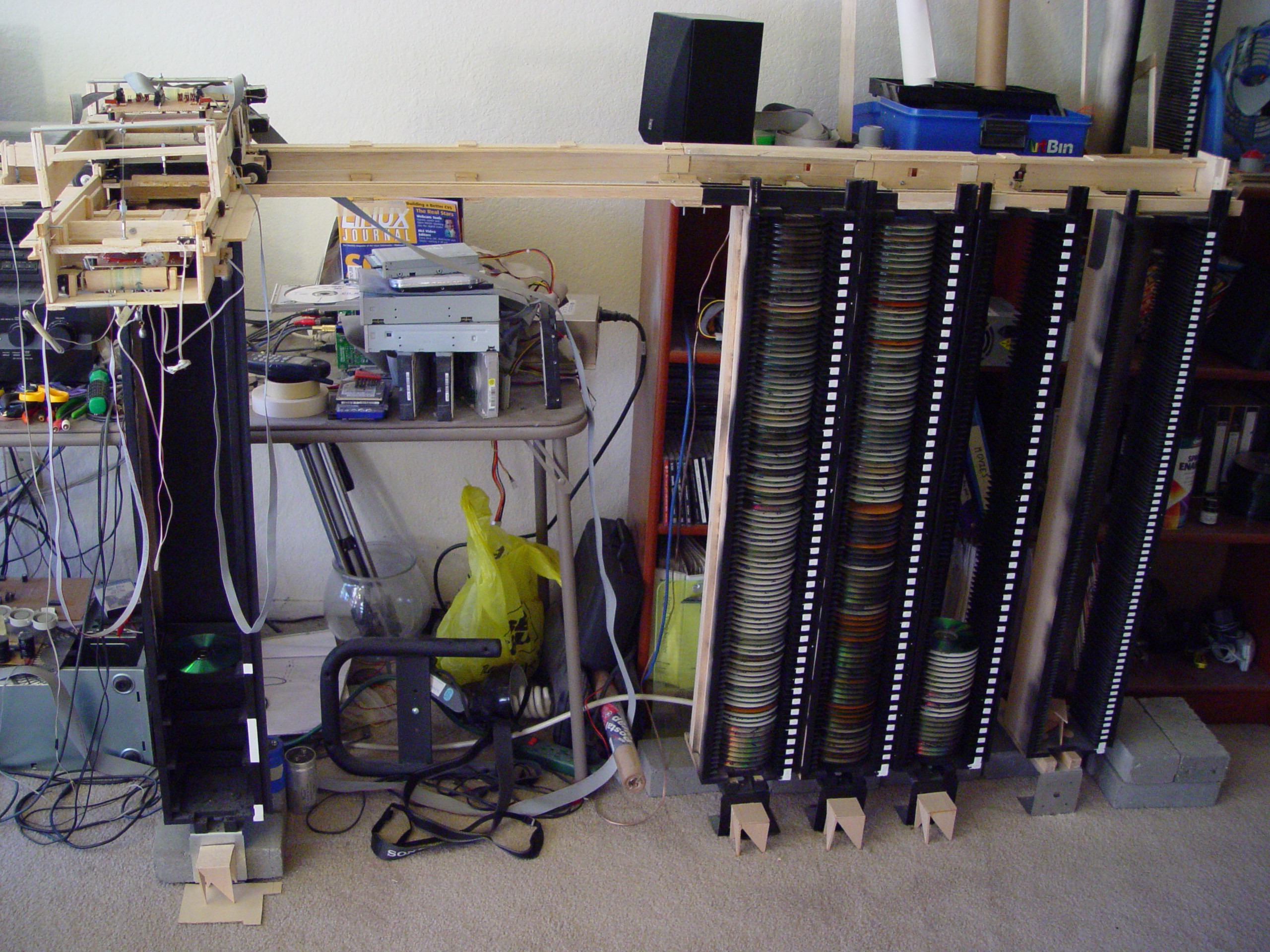
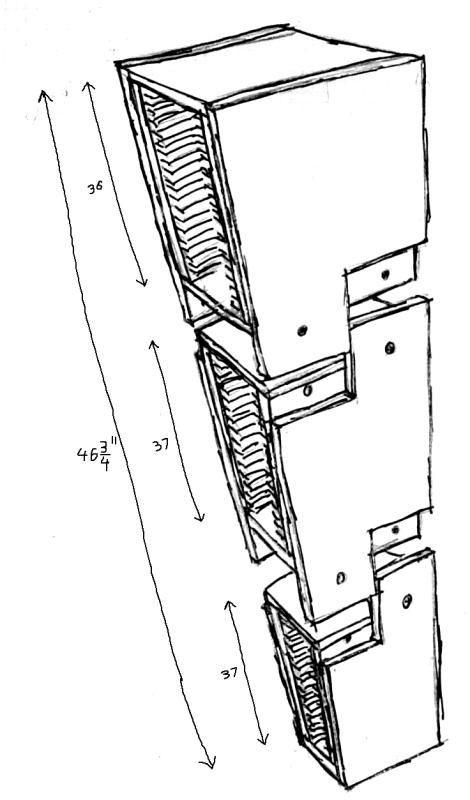
The 1st tower had 1 disk per row & took an eternity to fabricate. 3 more towers were built with 2 disks per row & a low density loading tower. It was fully functional, by this point. It would transfer disks from high density towers to a loading tower closer to the computer, where a lion could swap them in the drive. Various attempts to move the disks into the drive by suction proved too bulky & slow.
The 1st version was entirely TTL logic, driven by a giant board on the floor. It read all the photodiode voltages with comparators & multiplexed the sensor inputs & motor control outputs down to the parallel port. It was quite a leap just to remember anything about TTL logic that lions were shown in school, just 5 years earlier.

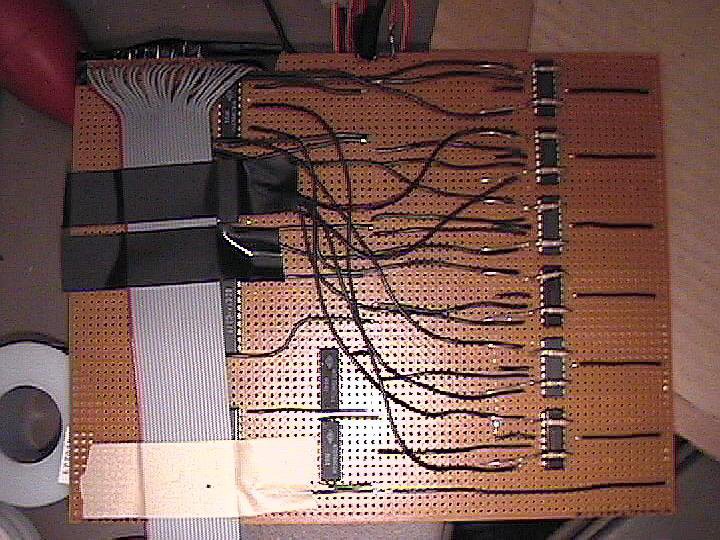

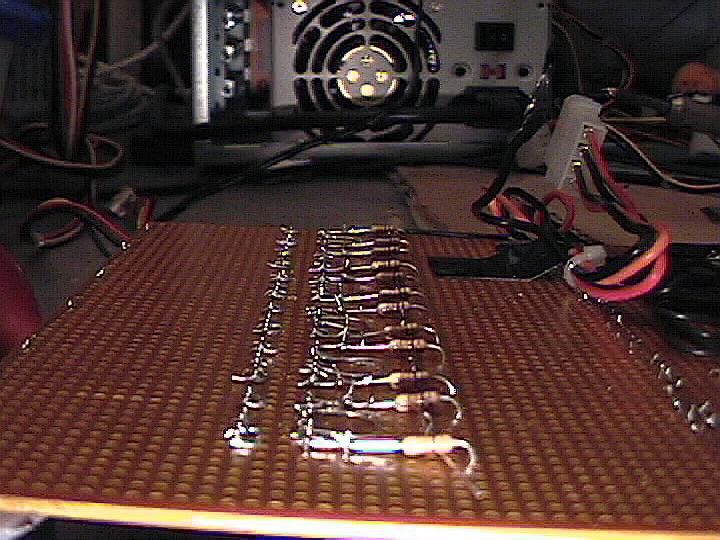

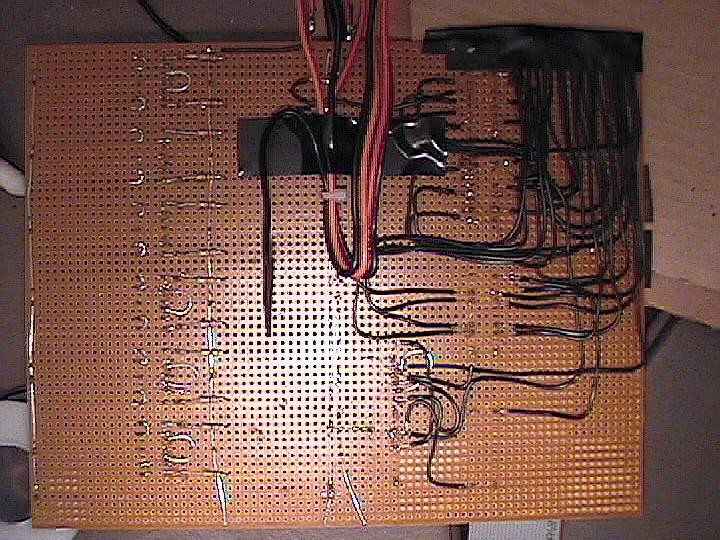
The very 1st point to point soldered board lions made.
The lion kingdom still used TTL logic in 2002 & viewed microcontrollers with their fancy serial ports as an impossibility in the short term.
Enough soldering of registers, counters, & parallel port pins could just barely convert a command line input to a physical PWM signal to control a servo, but it wasn't scalable. A TTL logic based robot could be abstracted into a bunch of registers with a way of reading & writing the registers with data lines & address lines in the parallel port.
Each bit in a register was the voltage of some sensor or motor. Reducing motor control from an 8 bit PWM value to a 2 bit H bridge value was the breakthrough that convinced lions it was possible to make a robot. Reducing an ADC from 8 bits in a register to 1 bit from an analog comparator was another breakthrough.

The TTL logic board was controlled by a modern PC. Hard to believe ancient TTL logic from the 1970's was the only way for all those feeds & speeds from the 2000's to access the real world.
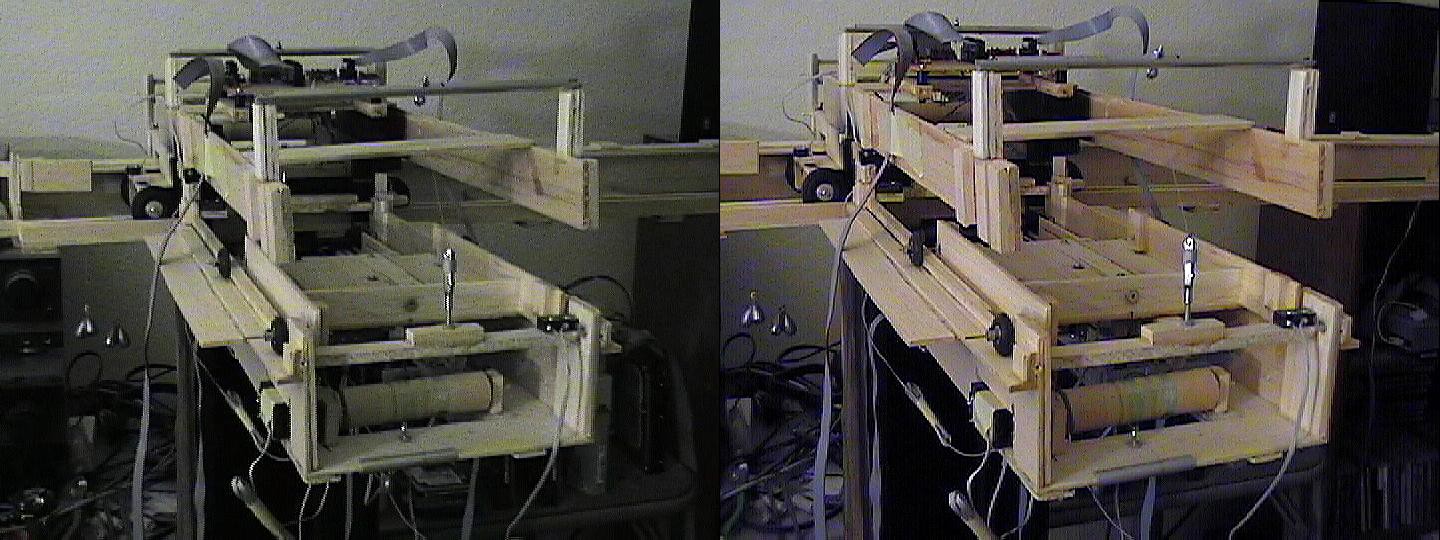
The balsa robot had a short life, despite appearing to contain a lot of disks. The disks had no caddies & risked getting scratched. It was built & all the disks were loaded in place, but the moment it had to be moved, it fell apart. The balsa was too fragile. After the robot was built, disks also started coming up erased from exposure to ambient light.
Before the 1st robot was finished, lions started trying microcontrollers in late 2002.
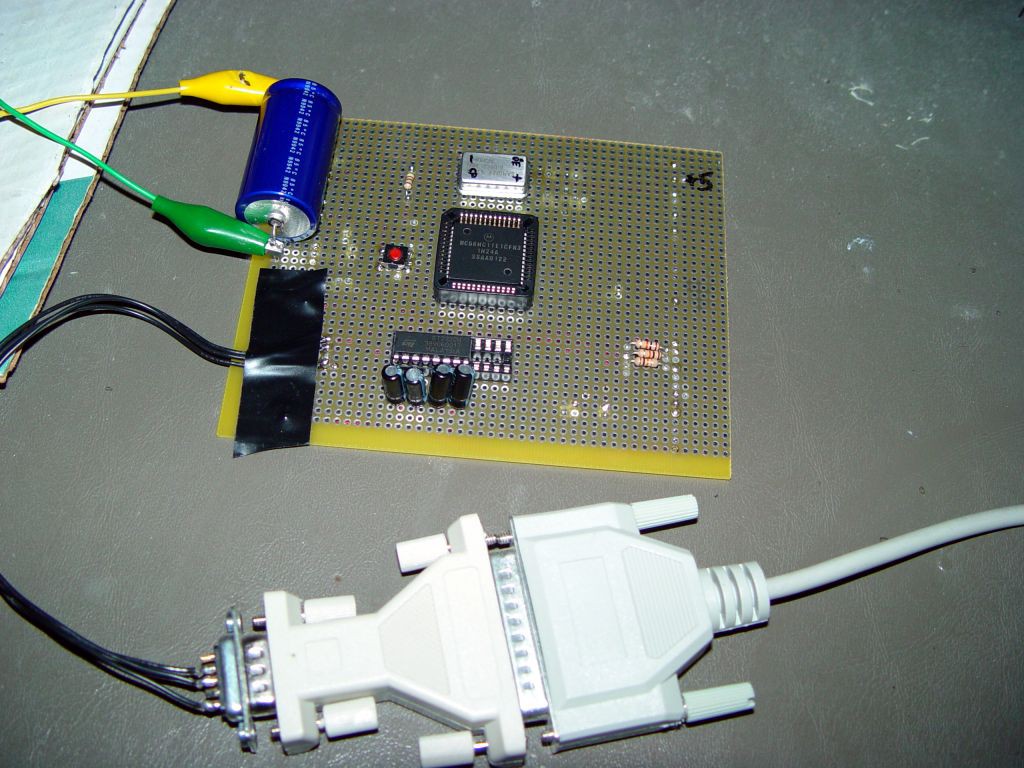
There was no Arduino in 2002, just buying an MC68HC11 & soldering it. Without an oscilloscope & very little knowledge of how the serial port worked, the lion kingdom gave up on making it print hello world. 6 months later, in June 2003, the lion came back to it & it finally worked. It turned out in the microcontroller world, the serial port wasn't independent of the CPU speed. The serial port was locked to the speed of the crystal, which was 50% faster than what the datasheet was written to. The serial port was 1800 baud instead of 1200 baud.
Despite having only 512 bytes of RAM, it was way beyond TTL logic.
In mid 2004, a new robot was started, with all microcontrollers. ...
Read more »













 williamg42
williamg42
 Erik Knutsson
Erik Knutsson
I like the look of the huge clock display on the ground in one of those photos. Did you ever publish that project anywhere?