 Johannes
Johannes
Ultrasonic distance measurement is old hat, it relies on time-of-flight measurements of ultrasonic pulses. This is commonly seen in cars for parking aid or in industrial applications for part detection, etcetera.
While getting the distance to the nearest object is nice for this, why not go a step further? There are projects which create volumetric data by scanning with a single sensor an stepper motors. This works but is slow. It should be possible to create volumetric data of a large room without the need to move the sensor mechanically: What I'm thinking of is ultrasonic interferometry.
What's needed is not a single sensor but a sensor array.
I will be working on three major topics:
- theoretical background
- analogue data aquisition
- analysis of data





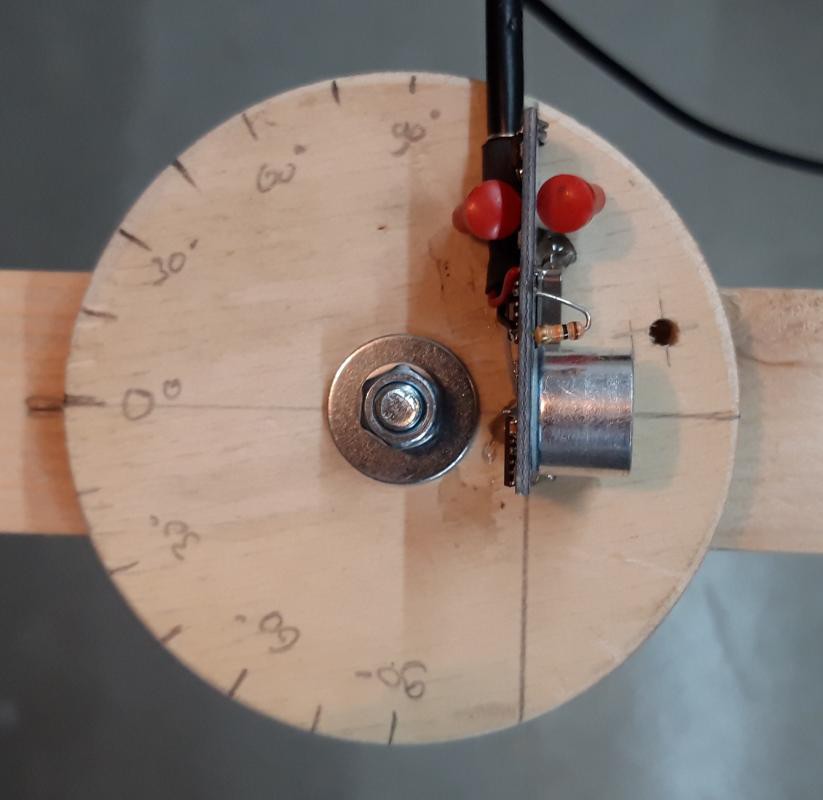
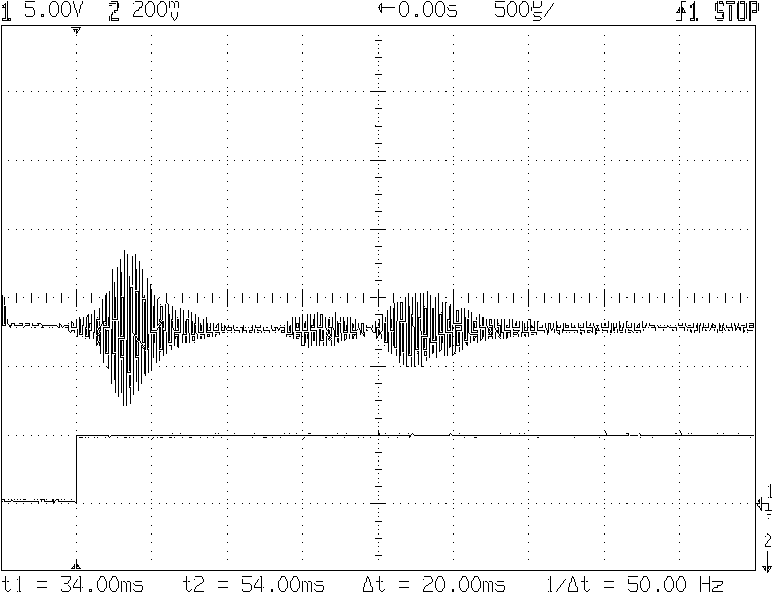
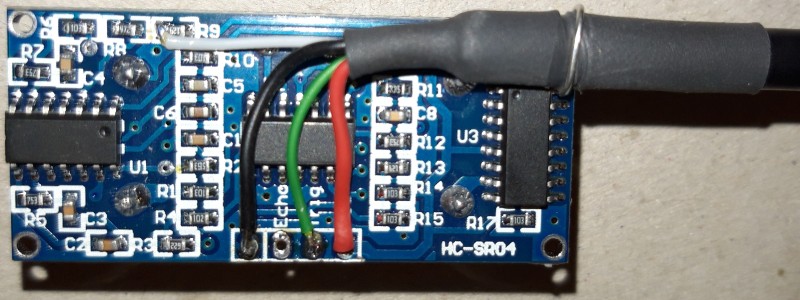
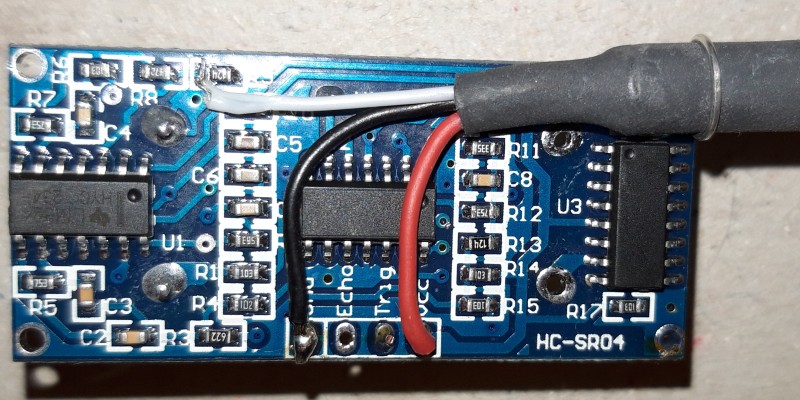
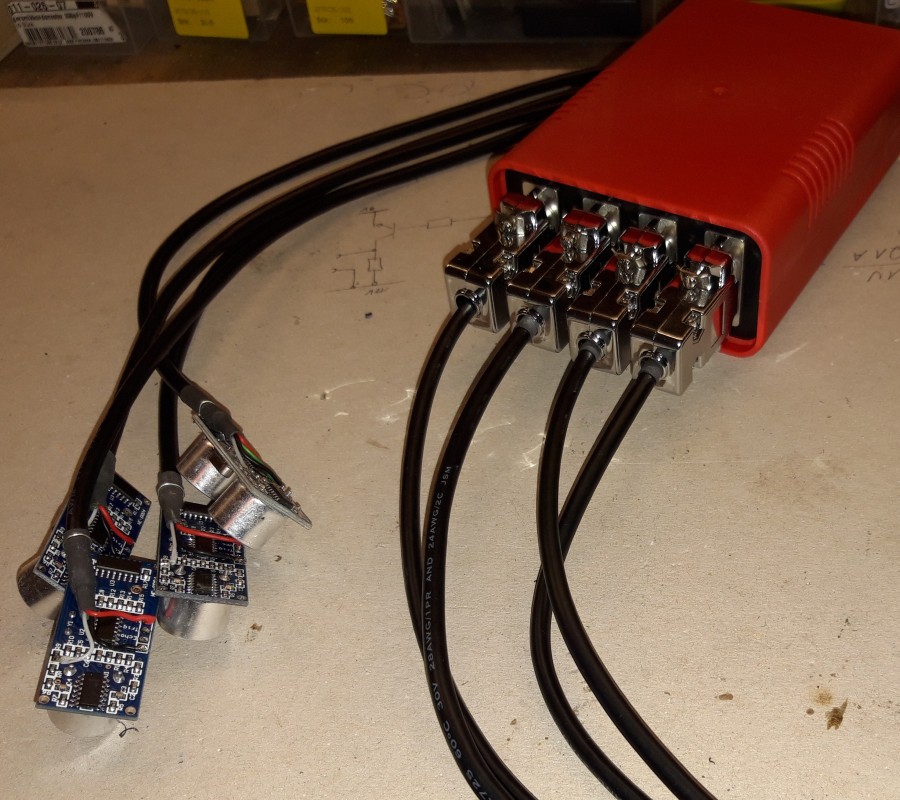
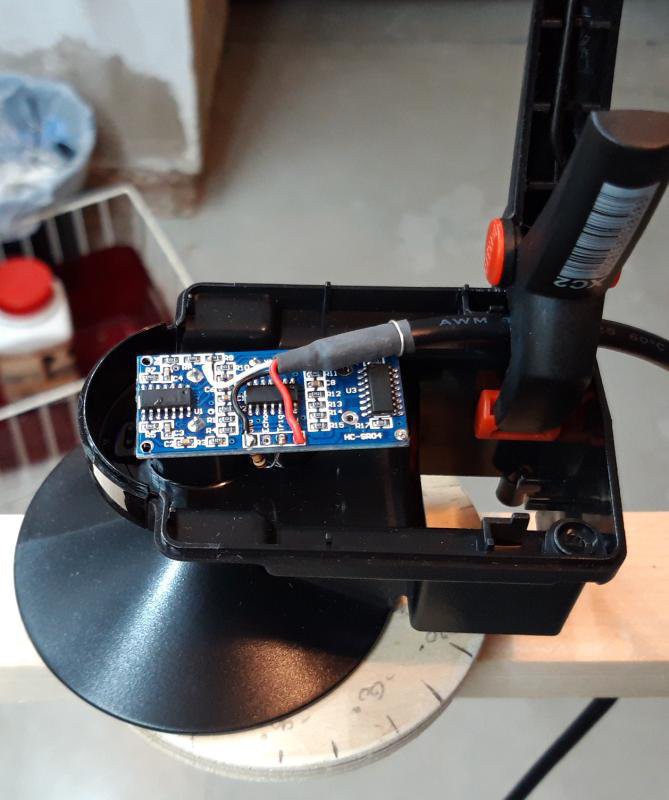 Likewise with "the cone". Here my HC-SR04 Sensor mounted inside the plastic case.
Likewise with "the cone". Here my HC-SR04 Sensor mounted inside the plastic case.



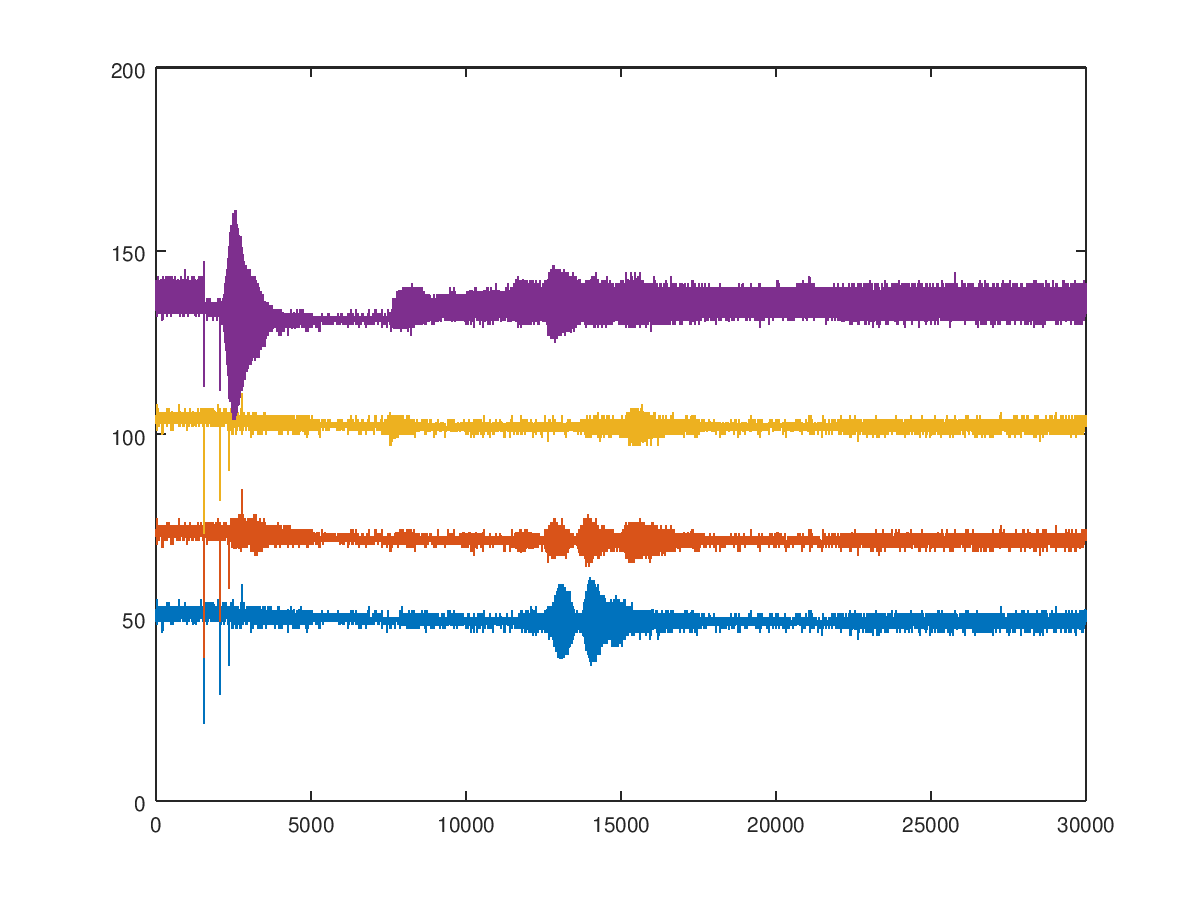
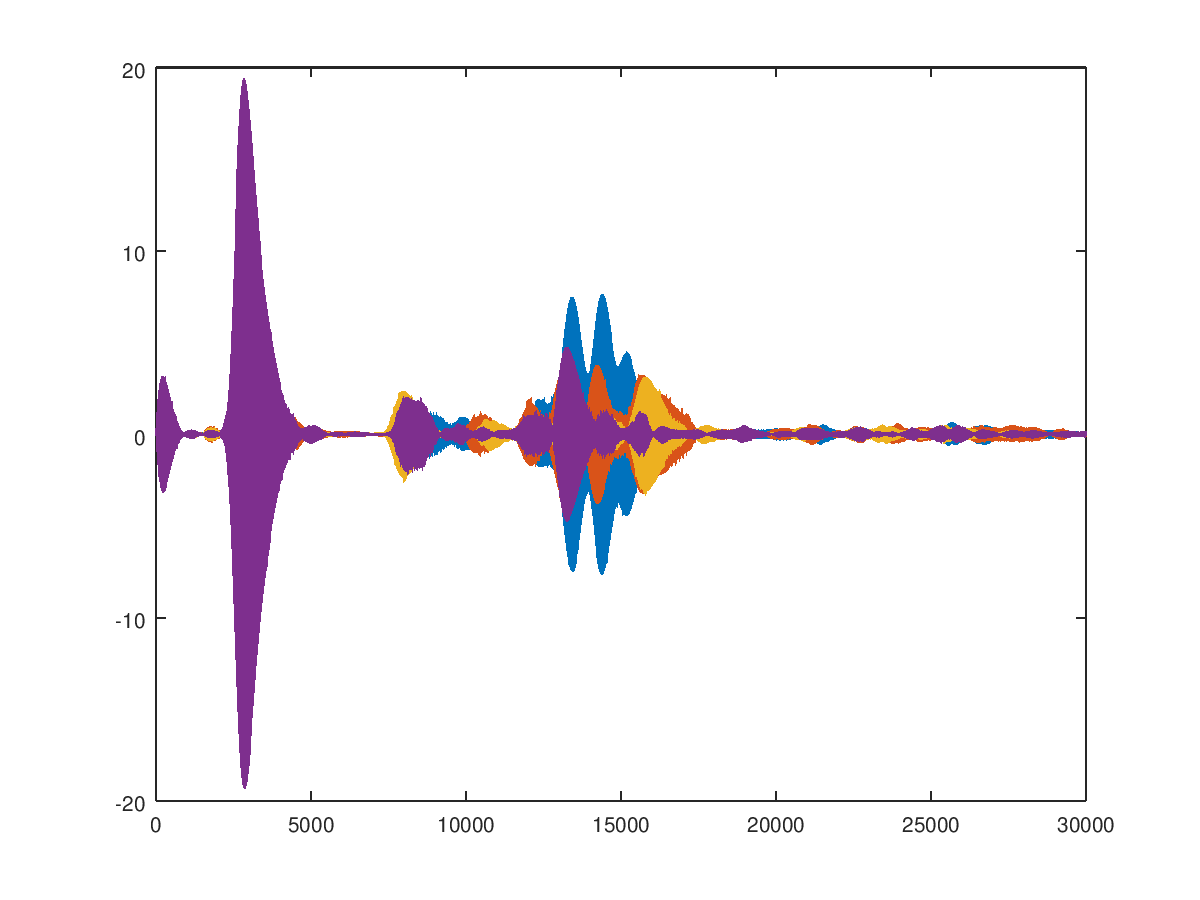
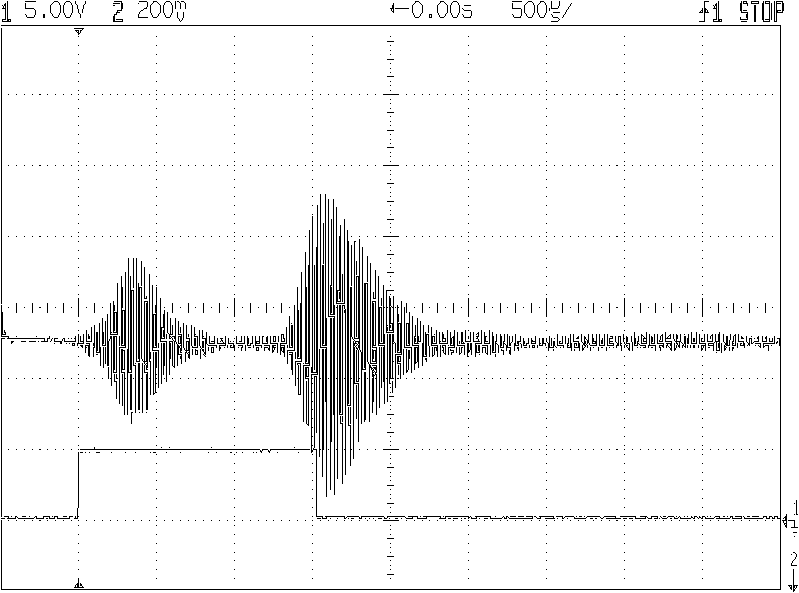

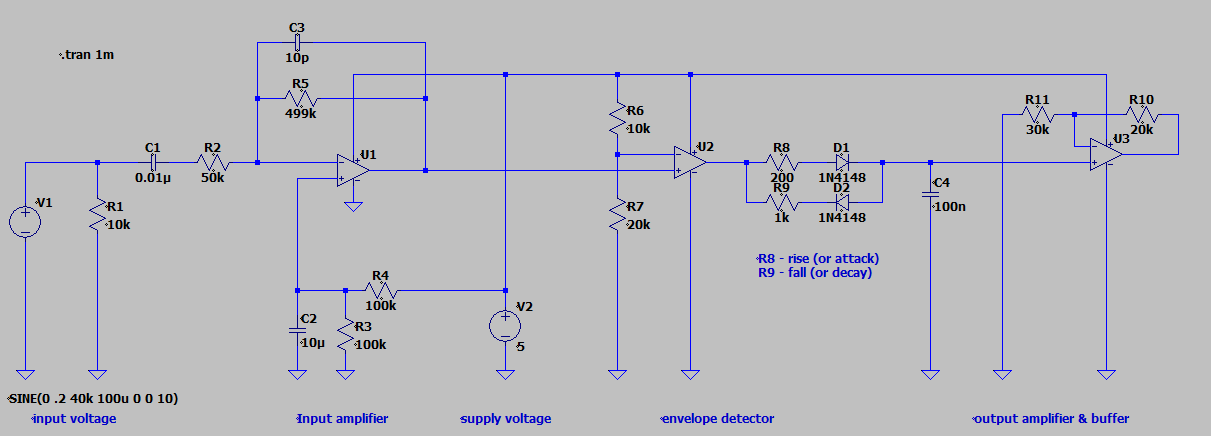
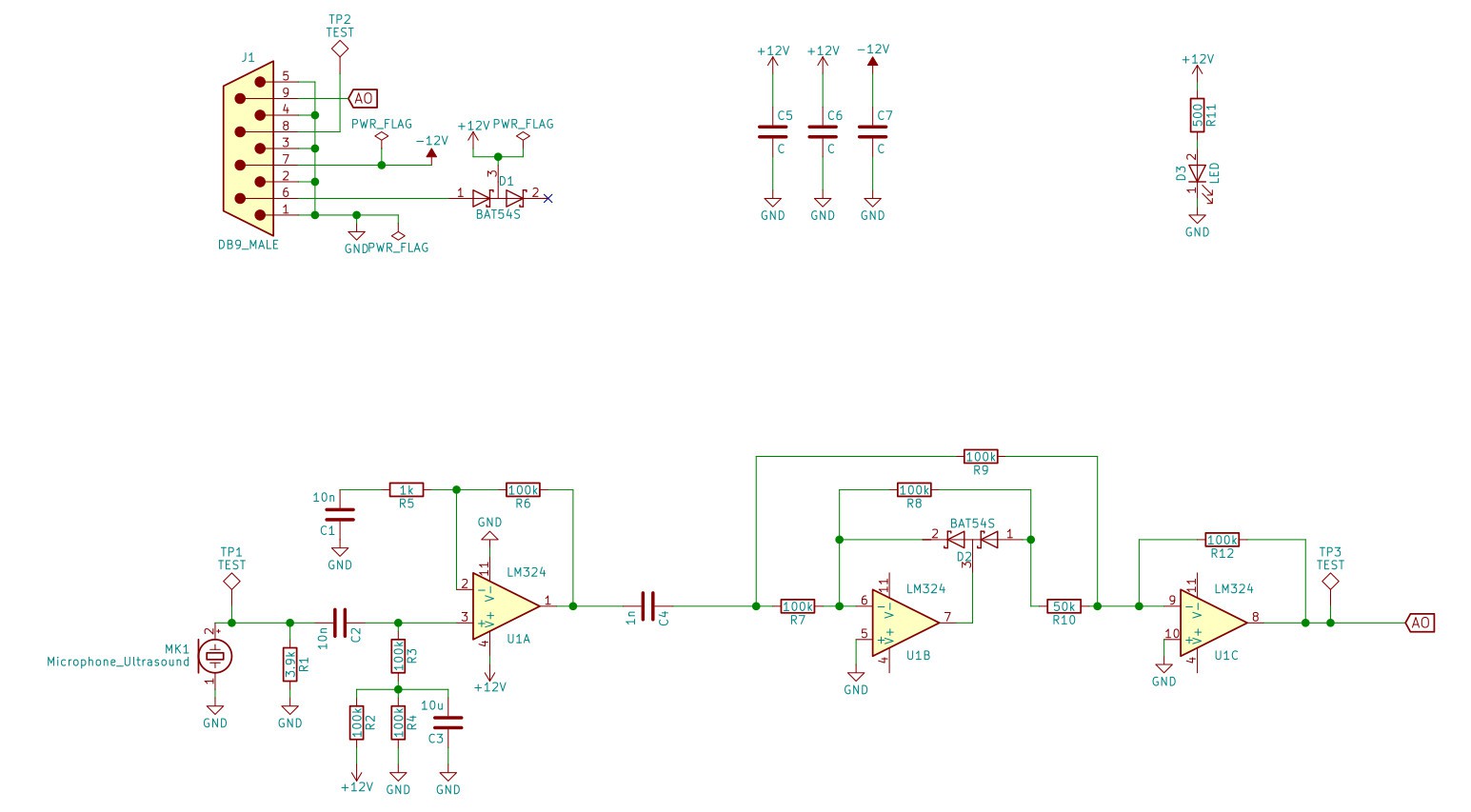
 Soo, I need to eliminate all low frequencies below 50Hz.
Soo, I need to eliminate all low frequencies below 50Hz.


 Hugh Brown (Saint Aardvark the Carpeted)
Hugh Brown (Saint Aardvark the Carpeted)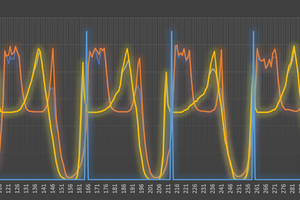
 Simon Merrett
Simon Merrett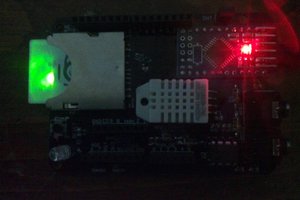
 jlbrian7
jlbrian7
 Joel Murphy
Joel Murphy
The "cone" is part of an electronic whiteboard. It sents US signals to a special pen that answers with an IR signal. Having two of them allows you to compute the position of the pen via triangulation.