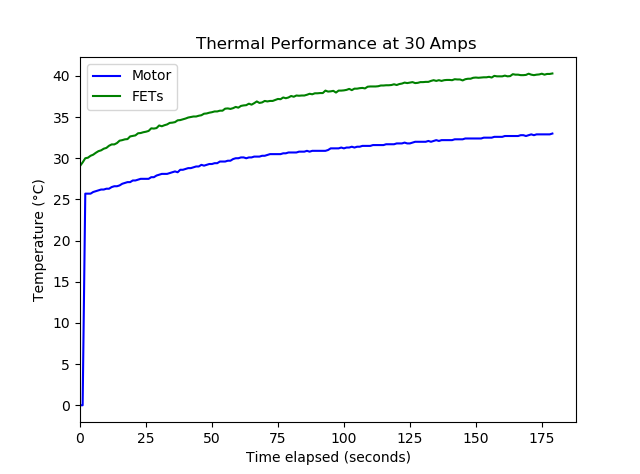
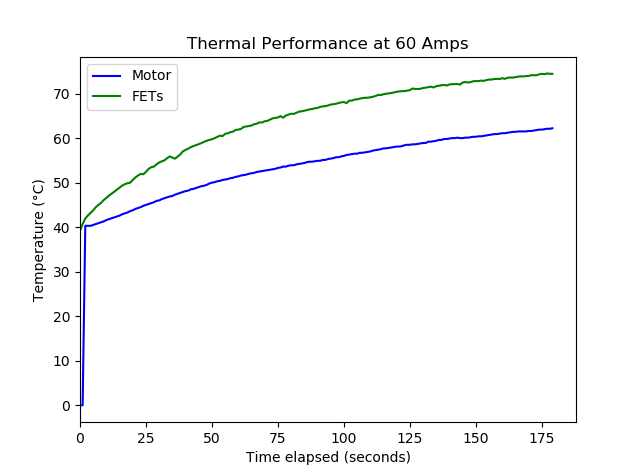
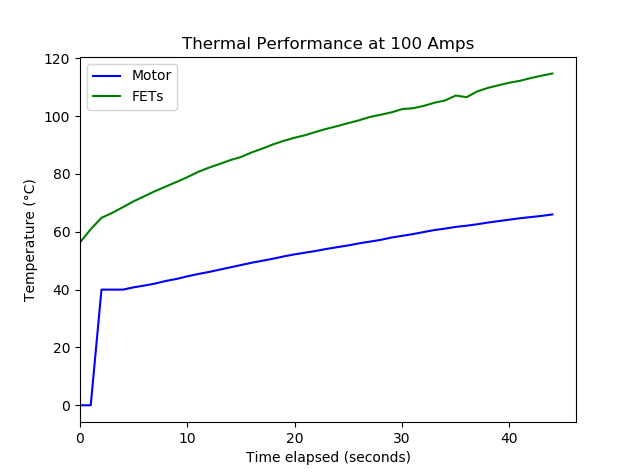
I tested the thermal performance at 30A, 60A, and 100A. This was done by setting the calibration current to the desired level, then disconnecting the encoder and having the motor search for the index pulse. This results in the heat being evenly distributed among the 3 phases, as described here: https://discourse.odriverobotics.com/t/testing-forced-air-cooling-with-a-5060-motor/483. I collected data from a thermistor epoxied into the motor windings, and the built-in thermistor on the ODrive board.
Conclusions:
- The motor cooling works quite well. Three minutes of sustained 60A current caused a temperature rise of less than 20 degrees.
- The FETs on the ODrive board heat up quickly. Currently I'm just cooling the board with a desk fan, so I'll have to design a more sophisticated cooling solution.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Interesting to see.
I did wonder about the lack of heatsinking on the ODrive. Guess it's left open for your own custom requirements.
Are you sure? yes | no