 Dan Julio
Dan JulioThe American Thanksgiving holiday finally gave me some time to attend to this project again. I even planned to use the Teensy version of the camera to look at my daughter's house to help her and her husband identify where it was losing heat but sadly I left it at home in a rush to get out the door for the holiday.
My end goal has been to make a wifi-enabled camera using the Beaglebone Black with one or both of its PRUs handling the Lepton VoSPI data stream to get the full 9 FPS out of the camera and be able to view it and access photos remotely. I looked into using the ESP32 like Damien Walsh did and although it is an incredibly capable embedded system, I ultimately decided that I want a full Linux environment to build the camera application on. Experiments with the Raspberry Pi show that it's hard for a user process to keep up with the VoSPI data flow - although as someone from my Makerspace pointed out, it's quite possible that applying the Linux real-time patches might make that feasible (something to be investigated at a future point). The PRU subsystem was the first solution that occurred to me but I also investigated writing a kernel driver or seeing if the v4l2 project supported the lepton. All of the solutions are intimidating to me because of the need to dive into some moderately complex low-level linux programming so it's been easy to put off getting started.
I have an old 7" 4D-systems Beaglebone Black touch LCD cape that I thought I'd use for the camera display but over time have decided it's too bulky and power hungry. I also have become interested in the Pocketbeagle board because of its small size and lower power consumption - characteristics better suited for a portable camera. This lead to an investigation of using the Linux framebuffer driver and one of the ubiquitous ILI9341-based small LCDs using a SPI interface. Because I also want to support another camera that also requires an SPI interface (for near IR - or night vision) I finally made the commitment to using the PRUs for the Lepton (over a low-latency software solution) because I can dedicate the two built-in SPI interfaces on the Pocketbeagle to the LCD and Arducam near IR camera.
Making that commitment, and the time afforded by the holiday, finally got me moving on building a prototype.
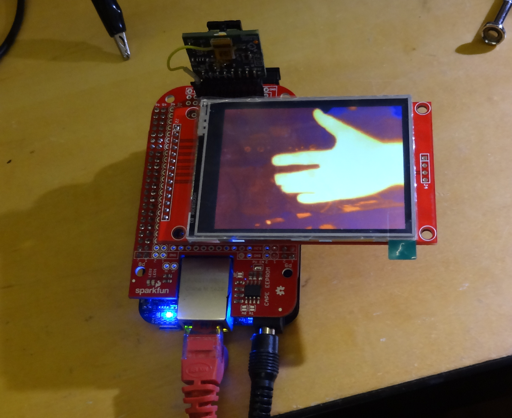
The first prototype simply connects the LCD to SPI0.0 and the Lepton to SPI1.0. I am taking things one step at a time, first getting the Linux FB talking to the LCD and then getting some user-space code talking to the Lepton. About twelve hours of hacking later (most spent figuring out how use the Device Tree system on the Beaglebone Black to configure IO and enable the frame buffer) yielded a hacked version of leptonic directly driving the frame buffer. It works pretty well. I'm not sure what the frame rate is but it's definitely higher than the 4.5 FPS I get on the Teensy 3.2 test platform. It also occasionally stutters and gets confused reading the VoSPI datastream resulting in a garbage display for a frame. The hacked code is pretty ugly - near midnight I was in full-on hack-hack-hack mode - so I'm not sure I'll post it (although I'm happy to share if you'd like a copy). There's also a version that can send packets over the ZMQ network interface. However I'm posting relevant parts of the /boot/uEnv.txt file below and a link to the Device Tree source file that finally worked to make my LCD a display (thanks Bruce!). I modified the dts file to fit my rotation (90°) and lowered the frame rate some (since my practical limit is 9 FPS).
The following uEnv.txt changes will make sense if you've messed with the Beaglebones much and maybe they'll help someone trying to get an ILI9341-based LCD to work as a display.
#uboot_overlay_addr4=/lib/firmware/.dtbo uboot_overlay_addr4=/lib/firmware/BB-SPIDEV1-00A0.dtbo #uboot_overlay_addr5=/lib/firmware/.dtbo #uboot_overlay_addr6=/lib/firmware/.dtbo #uboot_overlay_addr7=/lib/firmware/.dtbo ### ###Custom Cape dtb_overlay=/lib/firmware/TFT-ILI9348-SPI0.dtbo
Here are the two overlays. The first (re)enables SPI1 for the Lepton (this shows up as /dev/spidev2.0 and /dev/spidev2.1). The second was compiled from my modified copy of Bruce's Device Tree source file to enable the LCD FB. I made the file using the following command.
dtc -O dtb -o TFT-ILI9348-SPI0.dtbo -b 0 -@ TFT-ILI9348-SPI0.dts sudo mv TFT-ILI9348-SPI0.dtbo /lib/firmware
###Disable auto loading of virtual capes (emmc/video/wireless/adc) #disable_uboot_overlay_emmc=1 disable_uboot_overlay_video=1
This disables HDMI video so that SPI1 is available.
cmdline=coherent_pool=1M net.ifnames=0 quiet spidev.bufsiz=16384
Finally increase the SPI1 buffer size so we can read an entire segment at a time from the Lepton (the default Beaglebone SPI buffer is 4096 bytes).
It's scary to see an entire day's work boiled down to just a few lines in a text file.
Now to try to get something running on a PRU...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.