 Giovanni Leal
Giovanni Leal
So the ultimate test of the project has been that Andres took the arm with him 2 months ago. Having something that we made with our hands on the wild is an incredible feeling.
However we have been on our toes keeping an eye for any suggestion that he would make and incredibly he only had one complain!
The thing was that when he was walking the hand tend to open and close. Obviously this was unconfortable to him because people tend to look when they hear the grind. So why is this happening?
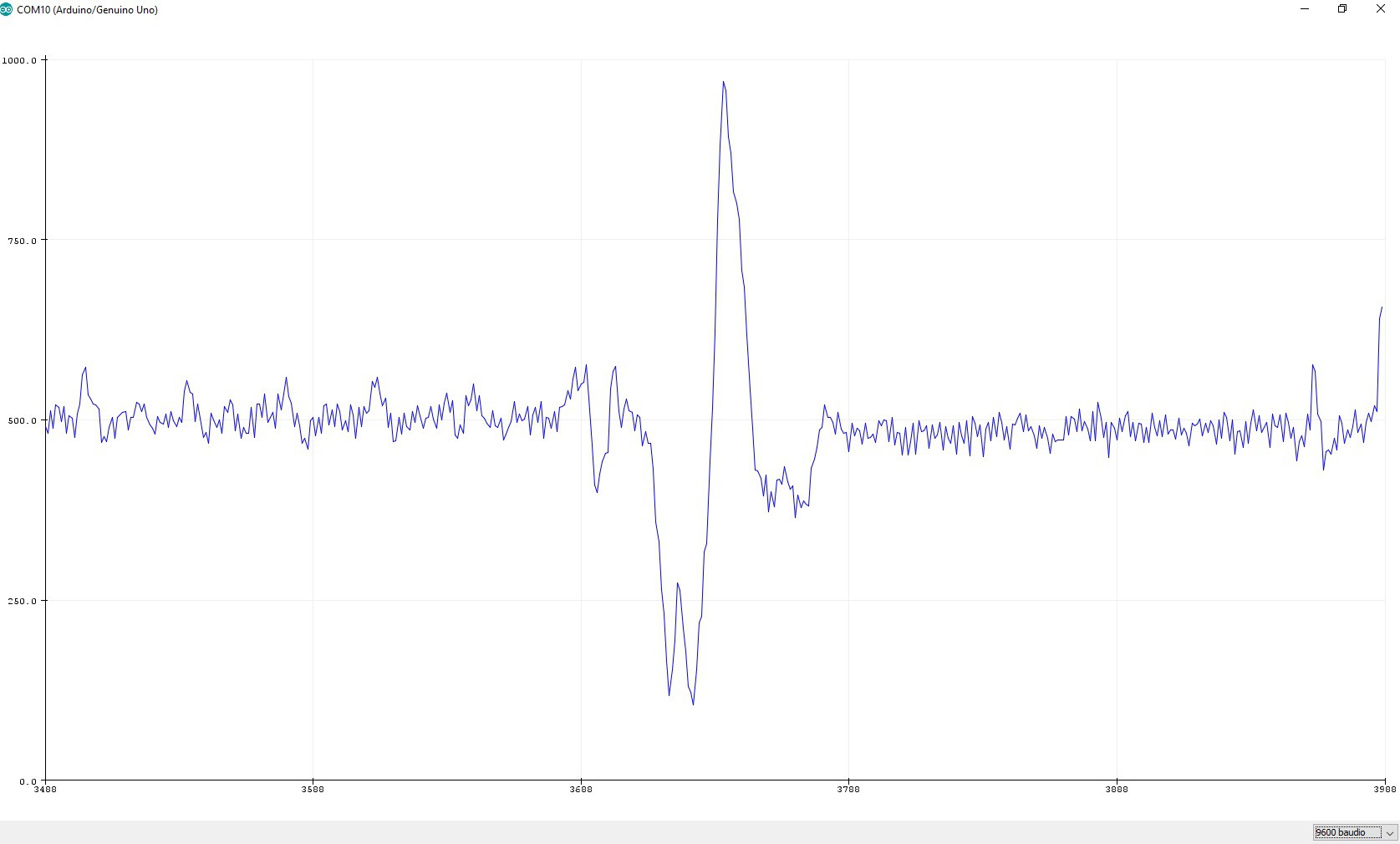
As you see on the next graph, the input we get its very "spiky" when someone walks.
So one of us was watching a video from James Bruton, by the way great projects hope to see that rocket being more than a missile, and we saw that he applied a simple formule to smooth those spikes. (he also took it from somenone else as he explains)
So the equations is something like this:
The filter variable is a factor that you should tweak to get that nice curve that will get your input usable.
If you watch the last part of this video(2:05) that we published, we show the arm and Andres drops the cap, he moves around and the hand stays closed!
Thats a huge win for us and we hope that it works for you has you saw in James video it has endless applications.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.