 M. Bindhammer
M. BindhammerI managed to finish the design of the so called console, one of the human-machine interfaces of the robot. It consists mainly of a 3.2" touch TFT, two 16 ways capacitive touch keypads based on the TTP229 capacitive sensor with accurate sensing of up to 16 points, an Arduino Mega, a Mega touch TFT shield and some 3-D printed parts:

Assembly
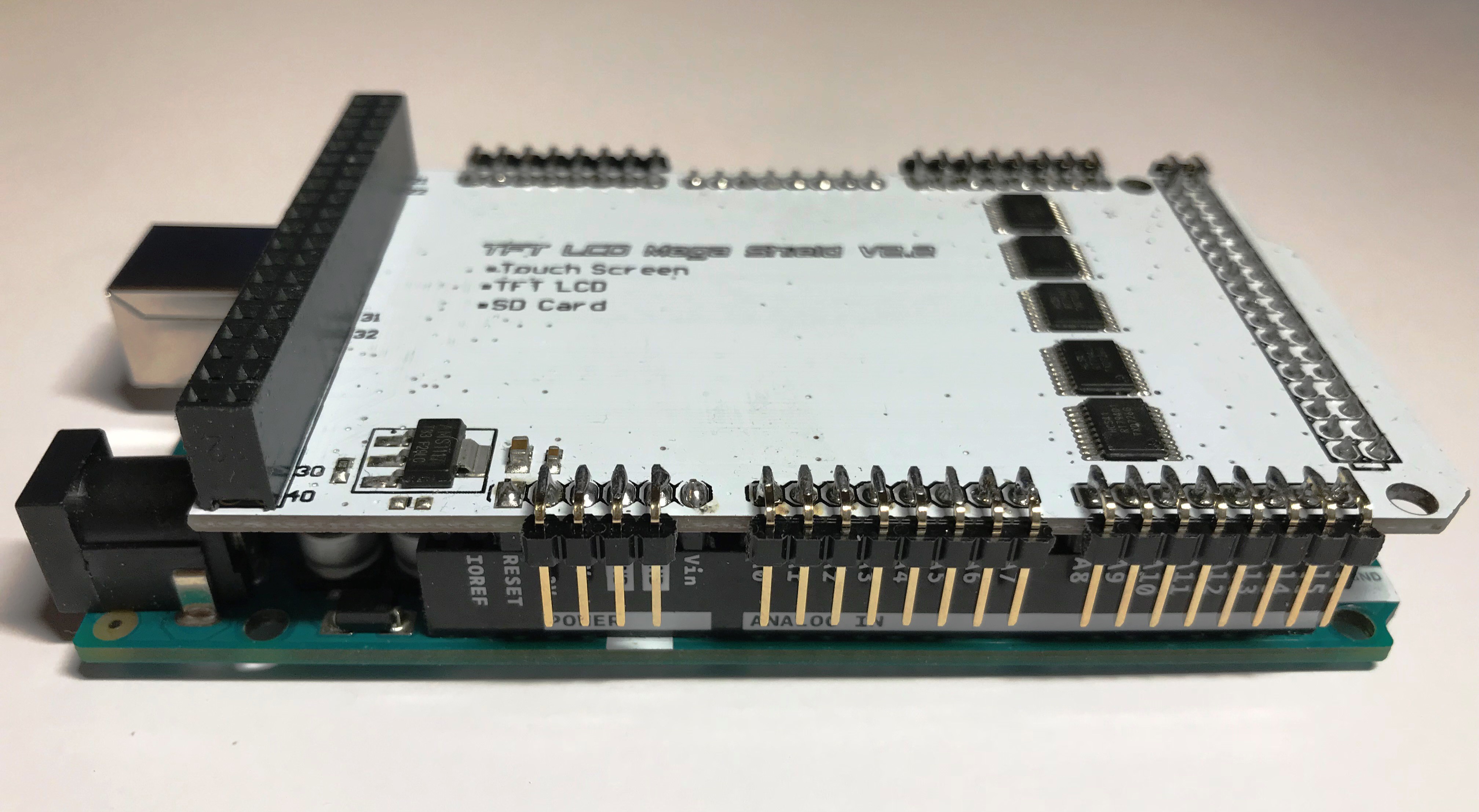
To have still access to the already occupied pins or not used pins on the Arduino Mega respectively the TFT shield I soldered angle male headers onto the according pins:
 3-D printed part which holds the two TTP229 capacitive sensor PCB's to form a touch keyboard:
3-D printed part which holds the two TTP229 capacitive sensor PCB's to form a touch keyboard: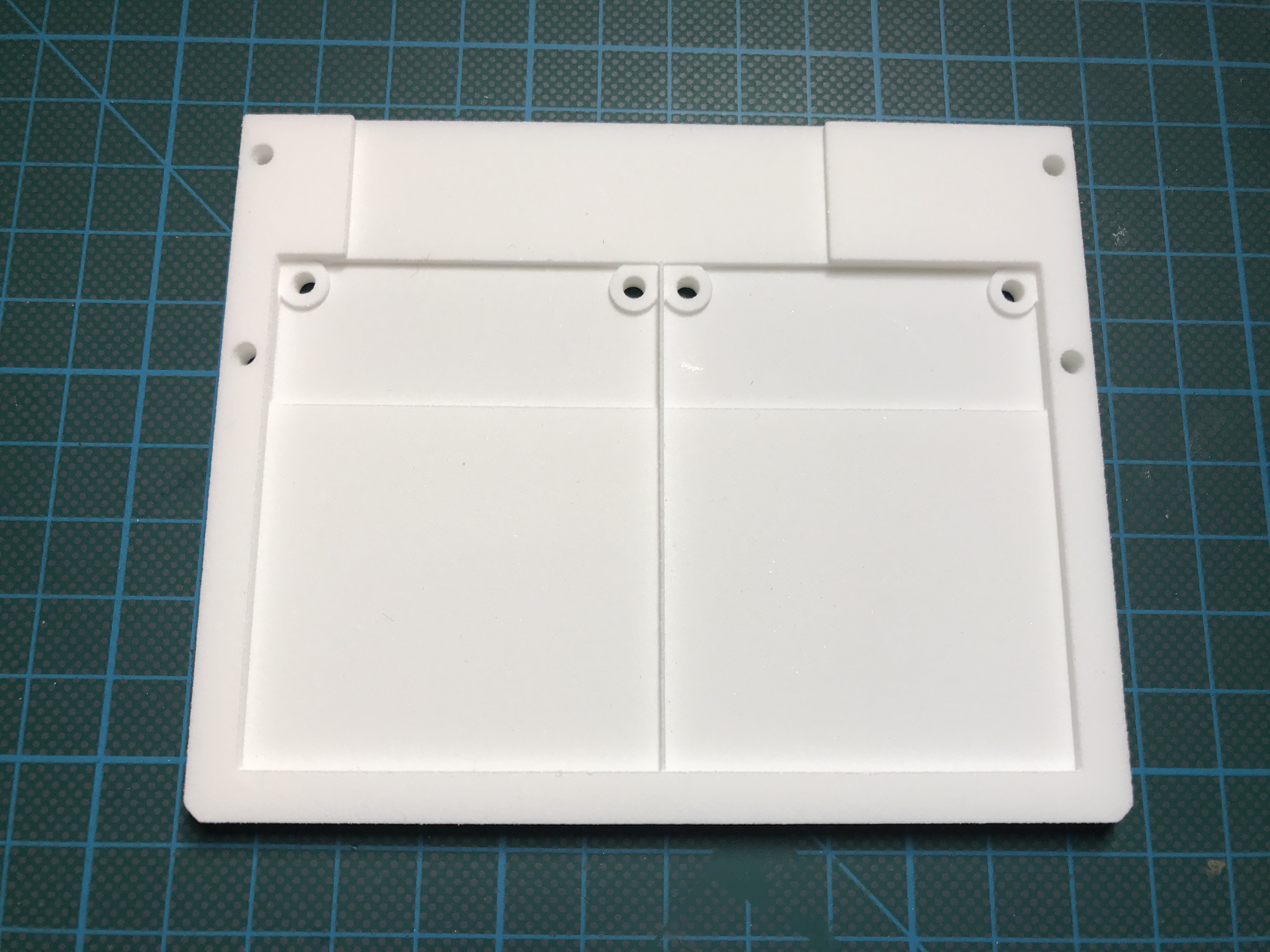
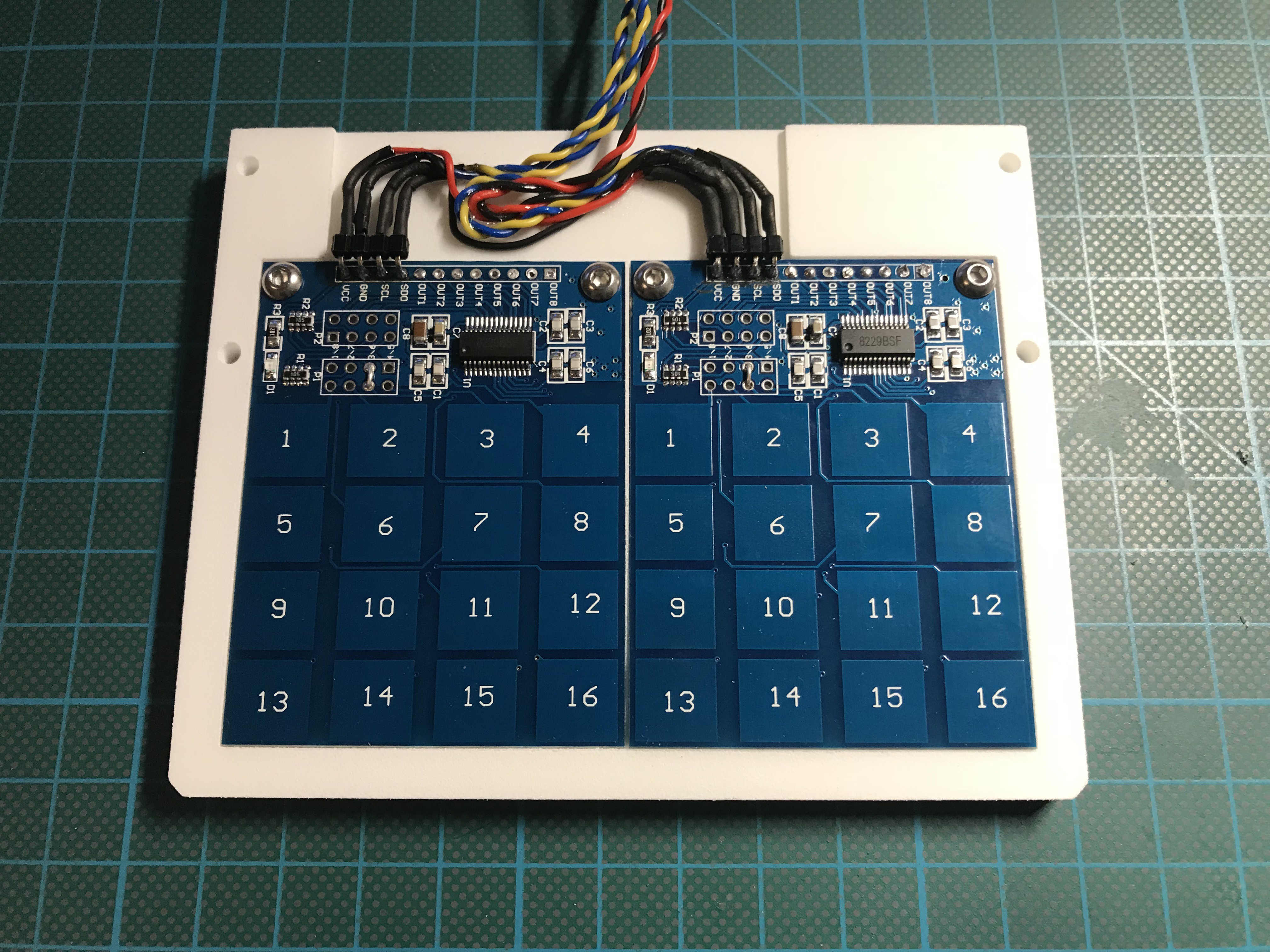
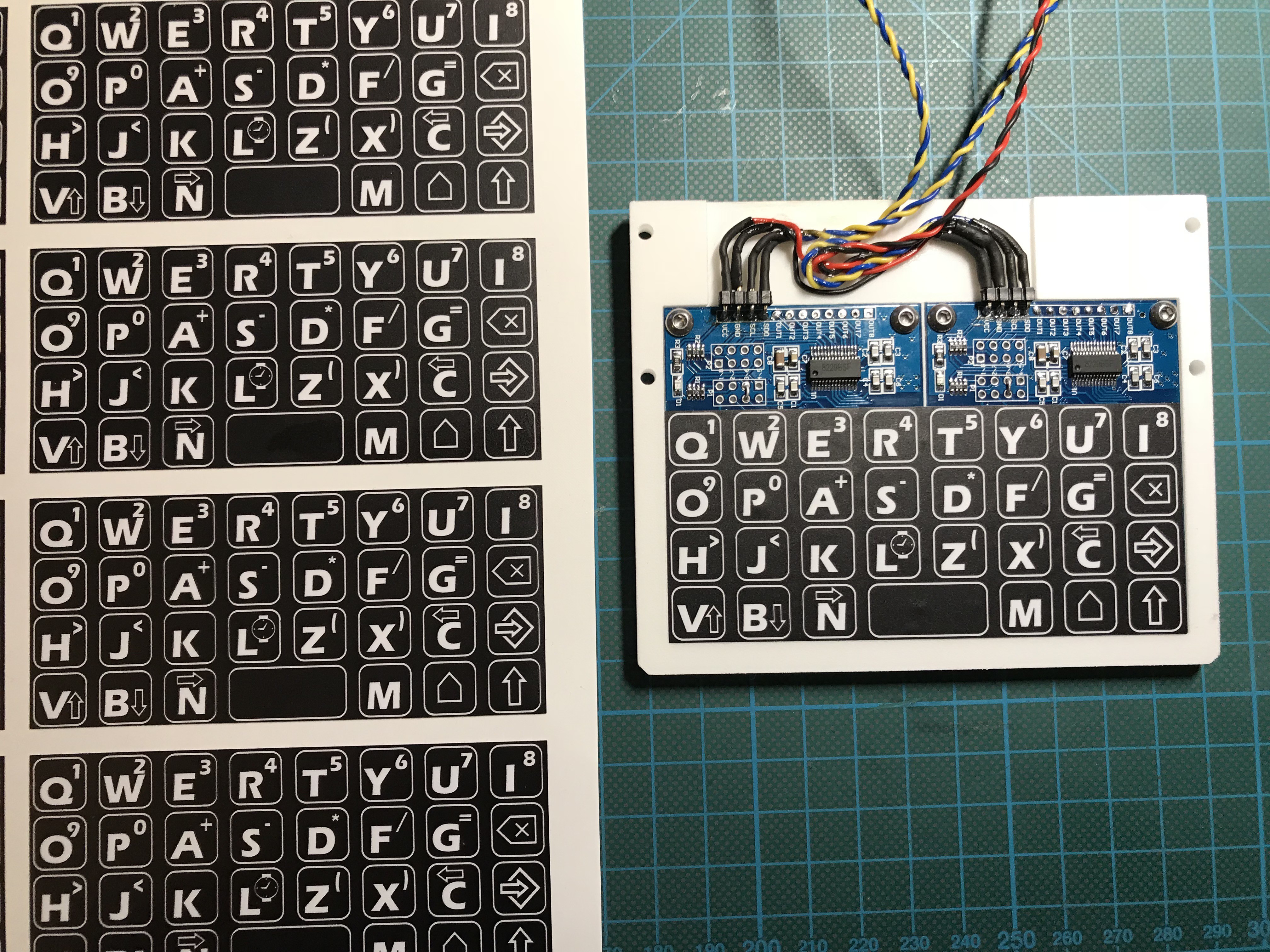
PCB's wired and mounted:
Later the two PCB's will be covered by a custom printed Lexan label done by a local printing shop and designed by myself in Inkscape, now only paper label for testing:
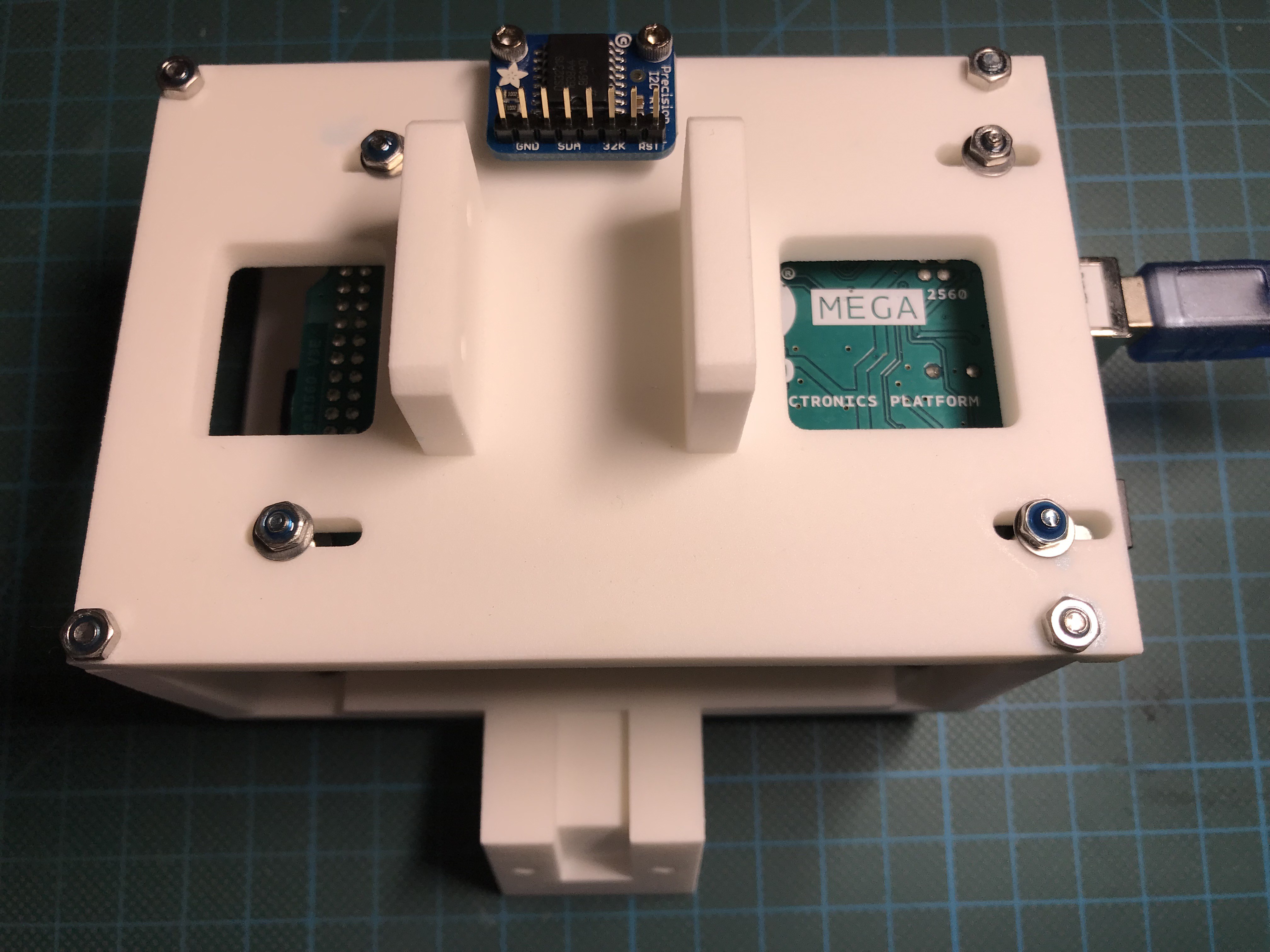
 Got further 3-D printed parts today and mounted TFT and Arduino Mega:
Got further 3-D printed parts today and mounted TFT and Arduino Mega:

An Adafruit precision DS3231 RTC is mounted on its back:
 Got the labels and tested the keyboard. It works like a charm even the capacitive pads are covered by the label, which has a thickness of 0.18 mm. Really an easy and reliable solution to build a touch keyboard. If you miss haptic feedback, you can add a vibration motor or a piezo actuator underneath the PCB's or in the enclosure of the keyboard:
Got the labels and tested the keyboard. It works like a charm even the capacitive pads are covered by the label, which has a thickness of 0.18 mm. Really an easy and reliable solution to build a touch keyboard. If you miss haptic feedback, you can add a vibration motor or a piezo actuator underneath the PCB's or in the enclosure of the keyboard:
 Finished console As you can see, I started already to squeeze out the RTC to get as much as possible information about the robots environment, using some astronomical formulas, inter alia the Gauss's Easter algorithm:
Finished console As you can see, I started already to squeeze out the RTC to get as much as possible information about the robots environment, using some astronomical formulas, inter alia the Gauss's Easter algorithm:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.