 Yannis
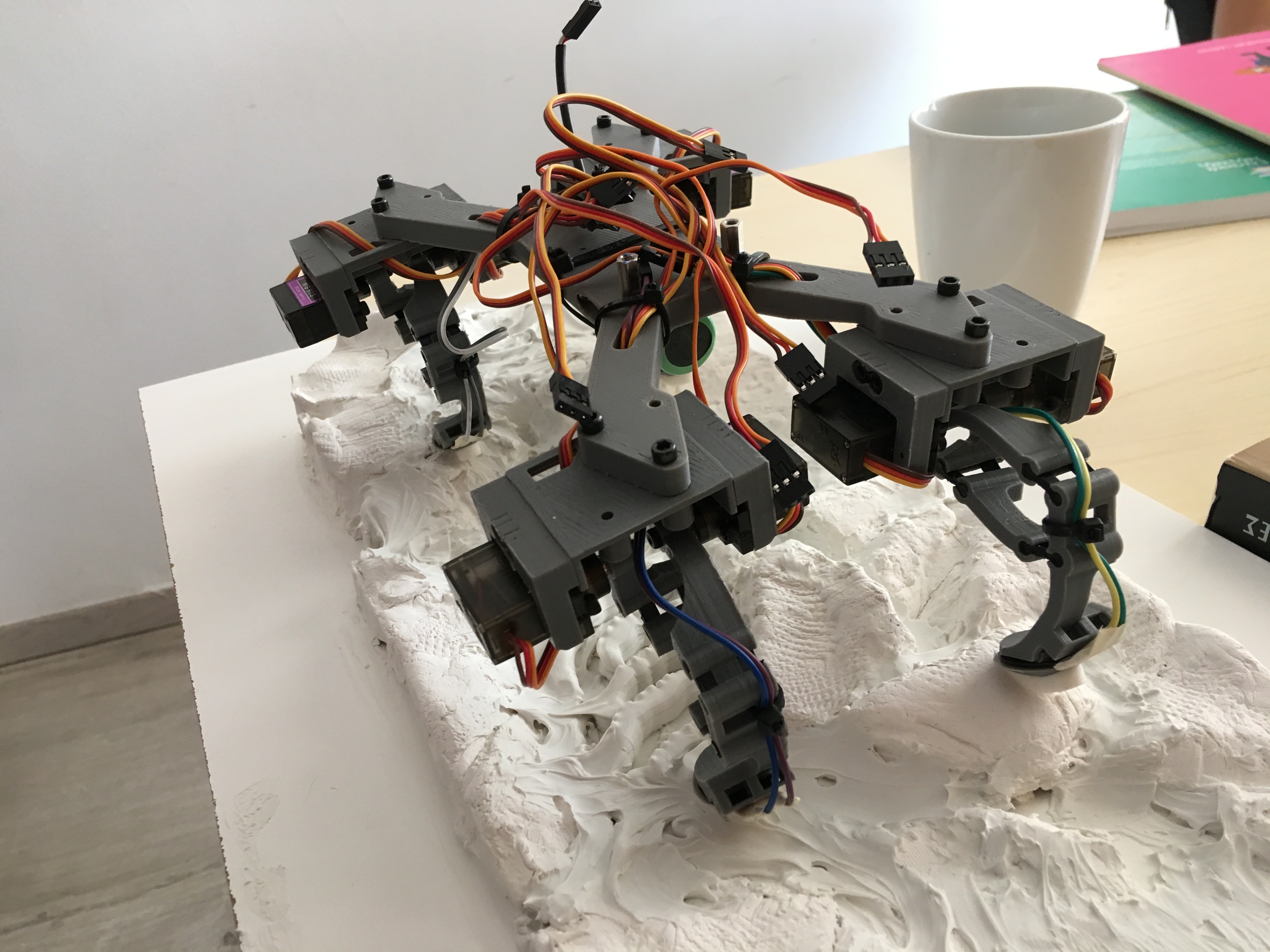
YannisI finally managed to 3d print and assemble together all the parts of the quadruped robot – save for the PCB which I am still waiting to be delivered. The robot turned out quite sturdy, although the leg joints are a bit more elastic than what I would have desired. However that should not affect standing and walking performance significantly.
The robot weighs in at about 300g including a high capacity 3.7v li-ion battery, and can stand while being unpowered.
The focus of the design now slowly shifts to software. My first goal is to have the PCT code used in the single leg working for all four legs and then make the robot assume static poses (crouch, stand, lean etc.). Walking and research on gaits and stability comes after.
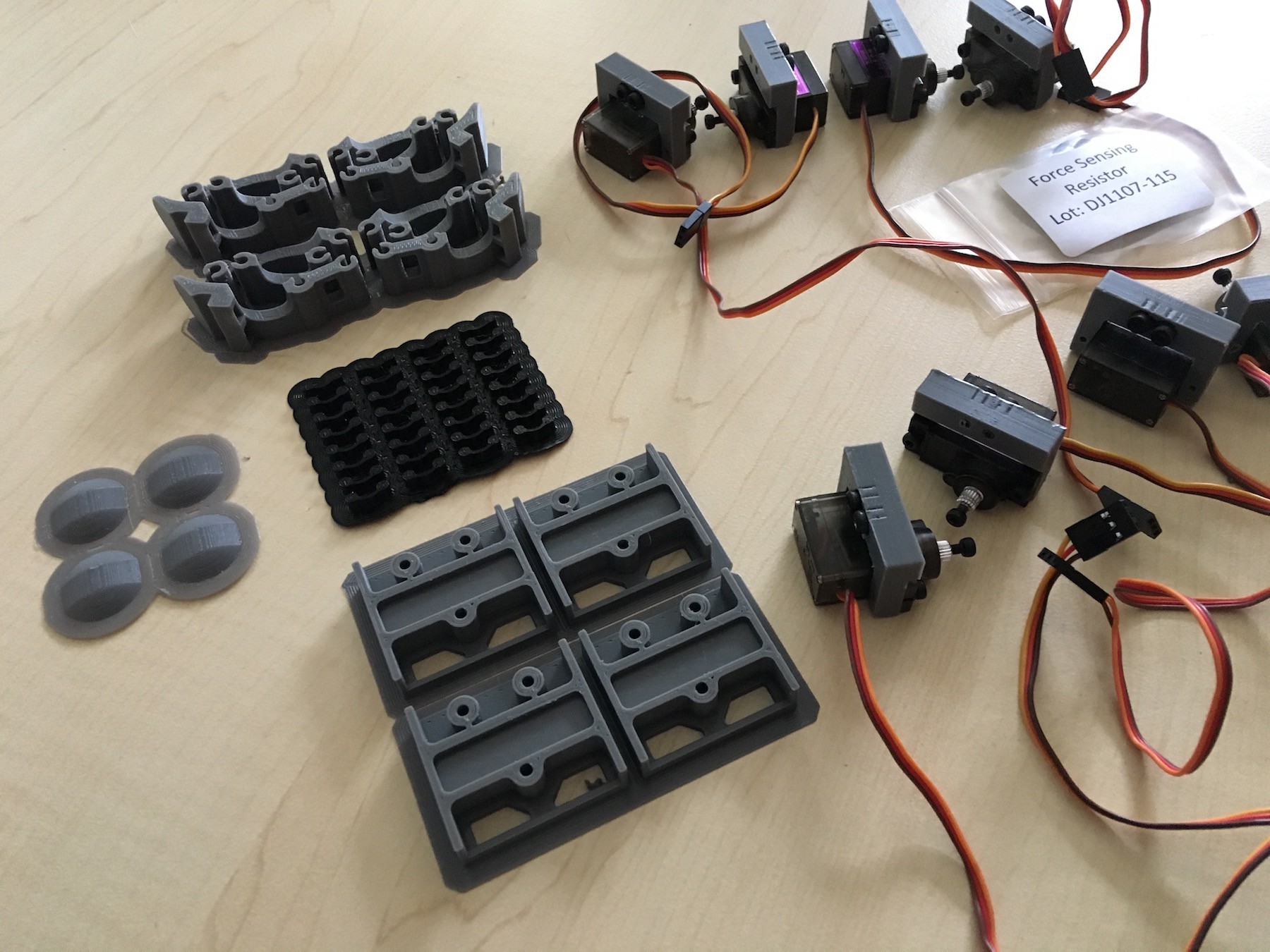
Turning this...
Into this...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.