 Maximiliano Rojas
Maximiliano RojasIs necessary obtain the equations that describe the position and orientation of the moving part of this module with respect to the base of the arm. We can start from the end effector because we already have the matrix that describes the arm structure, so, we only need to find the final position of the moving part with respect to the end effector (only position, because the orientation is not influenced by this, besides is the same in both cases). Is propper build two frames of reference:
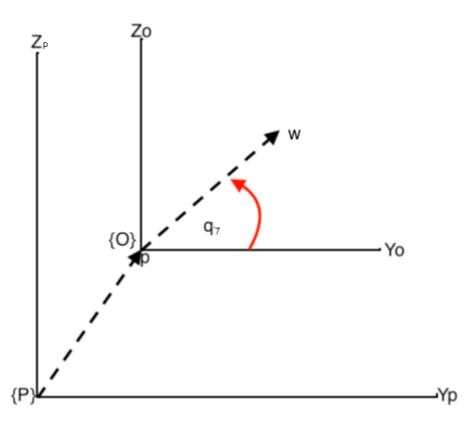
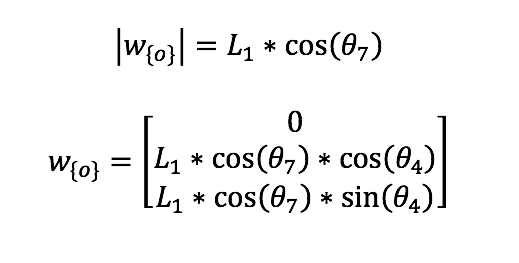
Where {P} is the frame of reference for the end effector, {O} is for the moving part, p is the position of the end effector in {P}, and w is the position of the moving part in {O}, then:
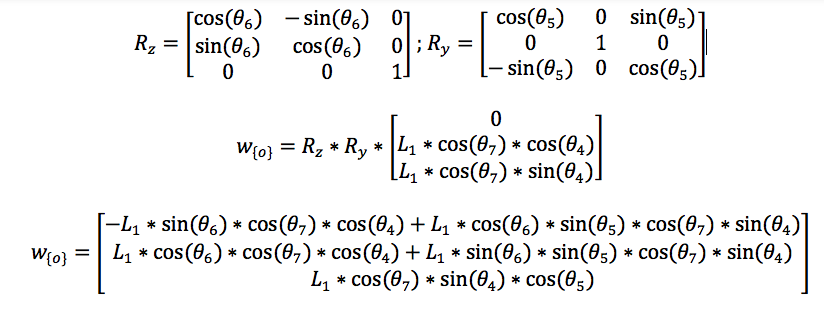
Considering the rotation of the end effector:
To obtain w with respect {P} we just sum the components of p, so:

The end effector and moving part has the same rotation. A vídeo that show the test is:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.