 Maximiliano Rojas
Maximiliano RojasI guess that the main problem is to implement the mathematical equations, this is easy to clarify because you already have the equations in the programs like "ControlTestV2.ino" where are the new equations for the position and orientation acquisition system, so you don't need to rewrite them or even understand'em, just use the function design to simplify your life (and project):
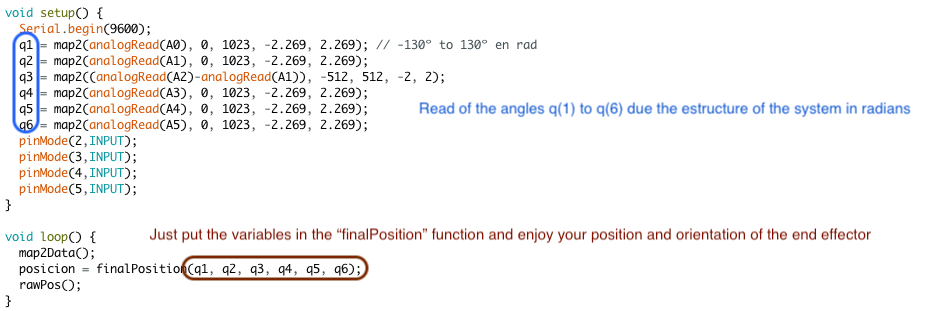
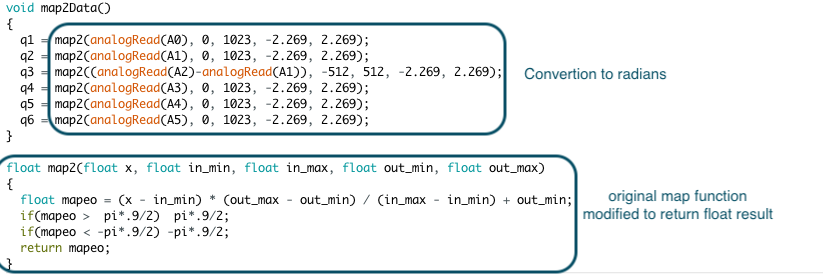
q(n) are the angles measured by the potentiometers, the index (n) of these angles are related of the position of these sensors, for more details, you can read "Stage 1", then, in the example program:
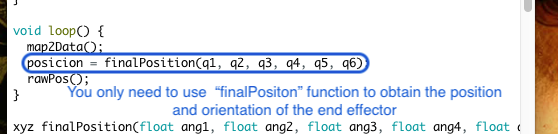
The other function has these purpose:
The simplest application example:
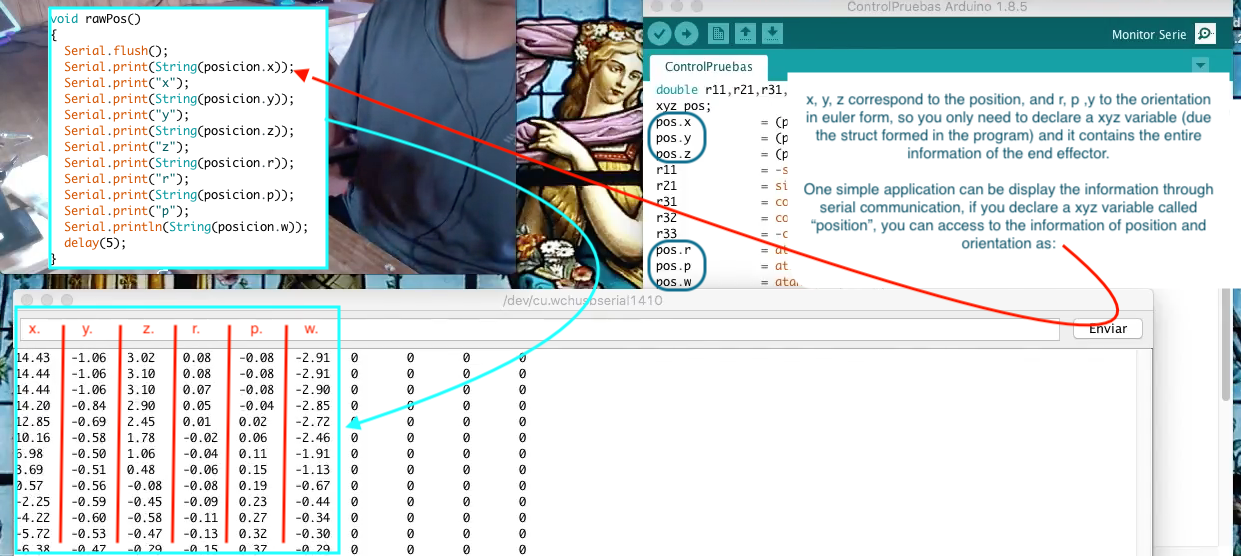
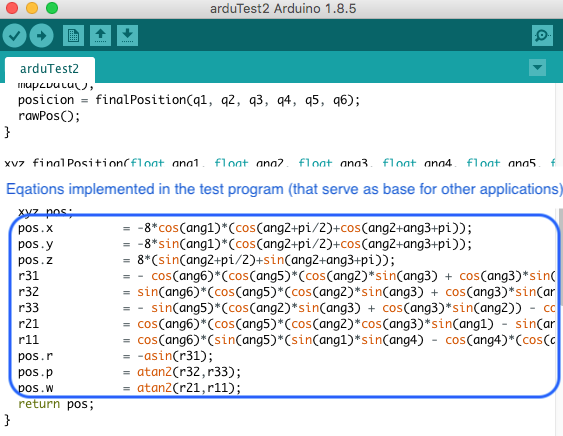
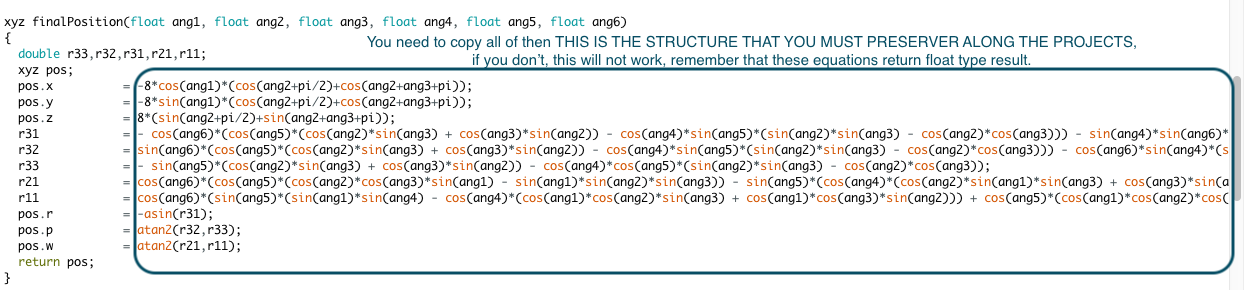
But ¿If you want to use it in other language program or something like that? Don't worry, the "finalPosition" function has the equations! so just copy that (if the syntax are similar) or just copy the equations and put'em in your new variables:
"Ok, but I only want to use a module of my creation". I can't be happier, you can start to program your module for been use with my system with the example program "ControlTestV2.ino", the way of creating a module depends on your idea for it, but you can be guided with the stages corresponding to module creation like "wolfverine", "test module" and "delta robot module".
Please, if you have any doubt, post it in the comments.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.