igorfonseca83
igorfonseca83There are several ways to use this tutorial. You can use it to:
- Learn how to program an ESP8266 using the Arduino IDE;
- Practice your electronics and soldering skills, etc;
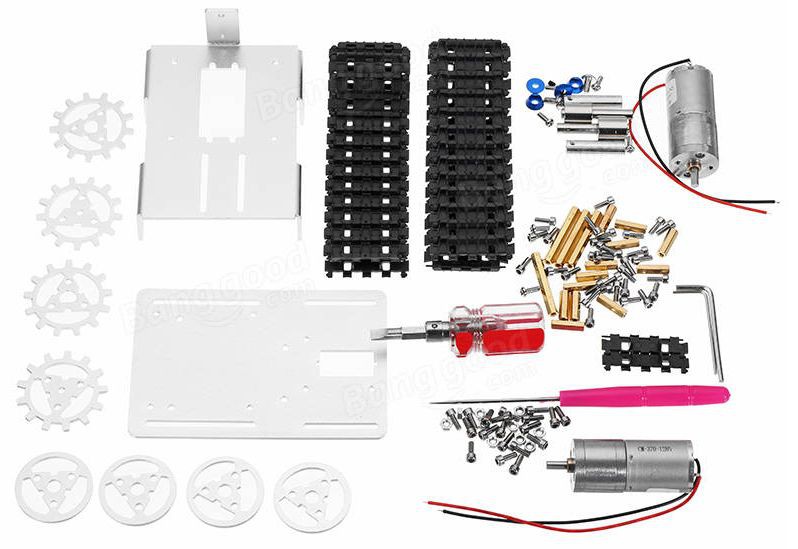
- See how to assemble a robotic kit;
- Learn how to use Blynk app on your projects;
Runner-up winner in Instructables Make it Move Contest!
Liked that projects? Please consider supporting my future projects with a small Bitcoin donation! :D BTC Deposit Address: 1FiWFYSjRaL7sLdr5wr6h86QkMA6pQxkXJ
 Nait Malek Youssef
Nait Malek Youssef