 Nikola
NikolaToDo-List:
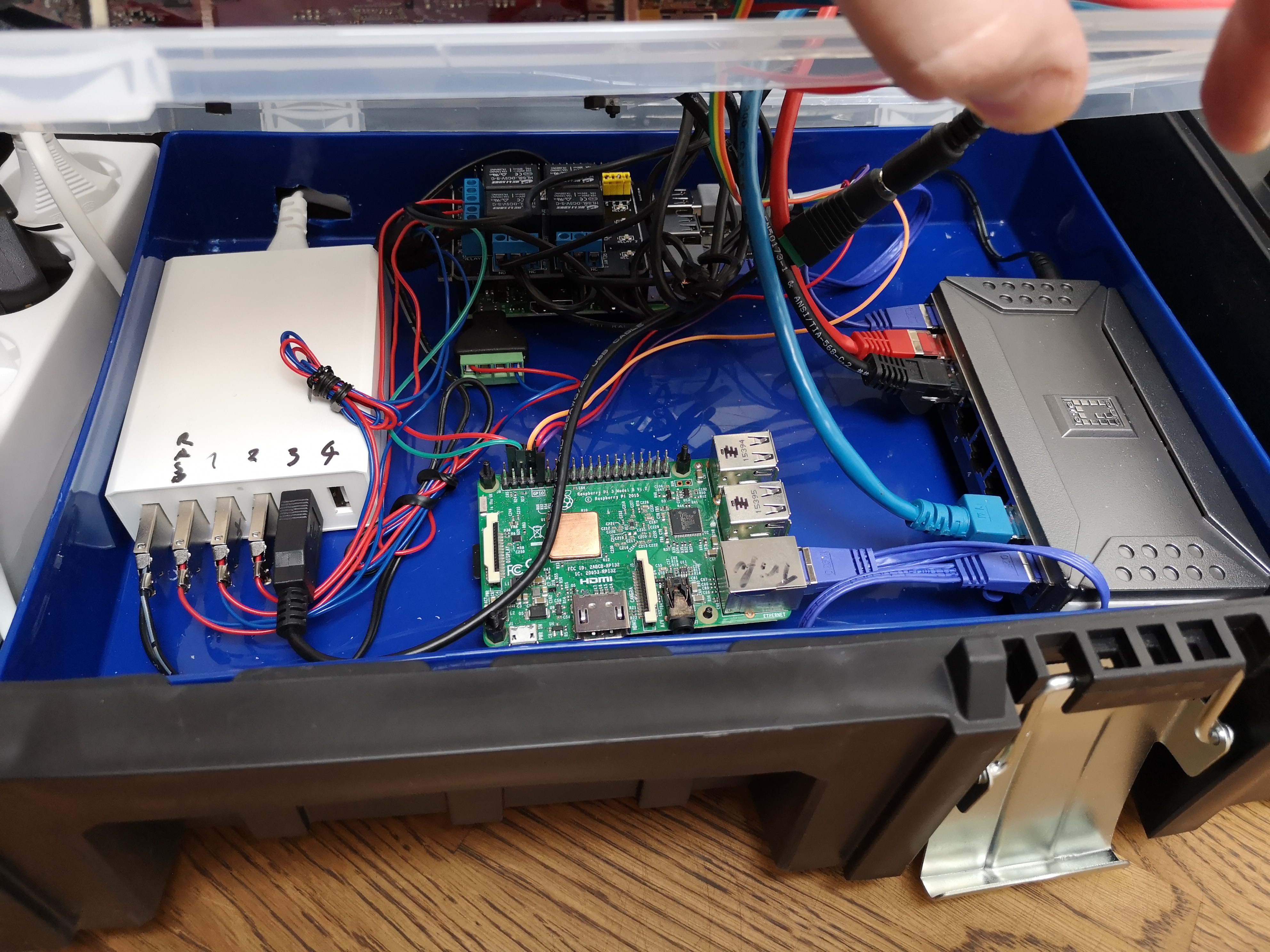
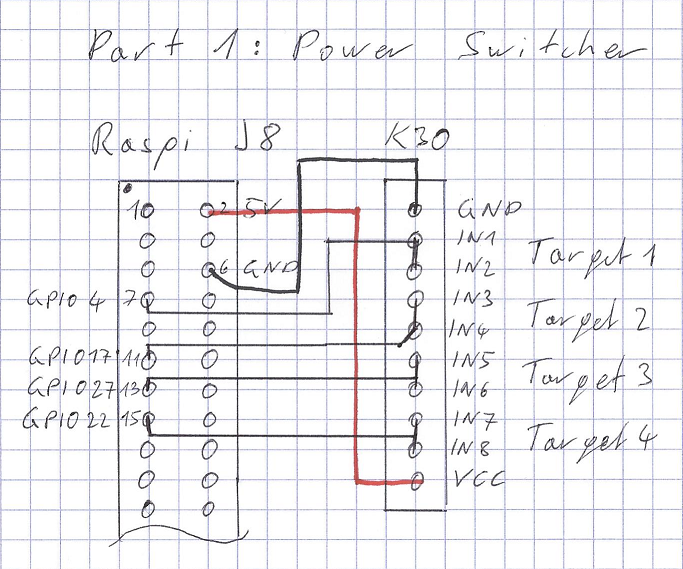
- Remote power switch --> DONE
- Remote serial connection --> DONE
- Ethernet connection to the home network --> DONE
- Simple Logic analyzer with Raspi-GPIOs --> DONE
- Raspi-CAM to check LEDs on target --> DONE
- NFS-Server on Raspi --> DONE
- Raspi in read-only mode --> DONE
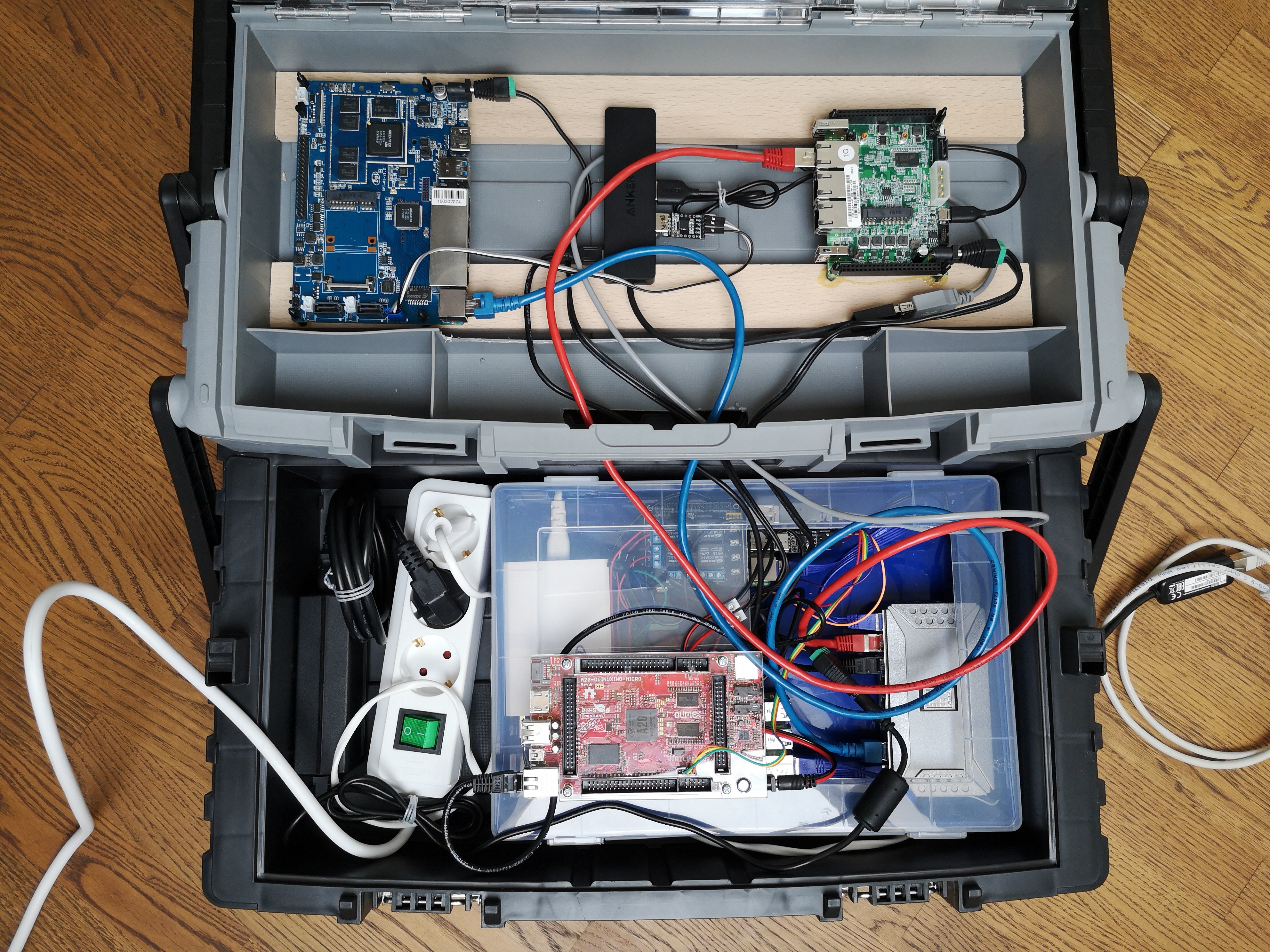
- Lab Box --> DONE

 Jacob Daniels
Jacob Daniels

 Craig Hissett
Craig Hissett