 Drix
DrixHistory
Before diving in the proof of concept, it's worth reminding what was available before.
The main alternative is a camera based solution and the median cost is $1999:
http://www.optitrack.com/hardware/compare/
This solution doesn't even scale anyway, above a dozen of trackers it starts lagging.
We also needed to embed intelligence, so we decided to look at what was possible and we made our own.
This project was inspired by various others, here are the fundamentals.
Legacy
First off, from inertial sensing to 3d positioning, we went through various steps of thoughts, analysis and experimentation, here are relevant links:
- Twiz - Tiny Wireless IMUz: hackaday.io/project/7121-twiz
- Wami - Ultrasound 2d positioning: rose.telecom-paristech.fr/2013/tag/wami
- Plume - Magnetic 3d positioning: hackster.io/plume/plume
Inspirations
The followings helped tremendously to understand the details of this system, thanks a lot to them:
- Trammell Hudson: https://trmm.net/Lighthouse
- Alexander Shtuchkin: github.com/ashtuchkin/vive-diy-position-sensor (+ wiki !)
- Nairol: github.com/nairol/LighthouseRedox
1st feasibility test
We first replicated the above inspirational approach as proof-of-concept, and compared it against the hand-held controllers of the commercial Valve tracking system in an ideal room. We taped a non-regular hexagonal shape on the floor of the testing room, then traced this shape by hand with both devices, recording the devices’ positions using Bonsai.
Here is a visualisation of the preliminary results:
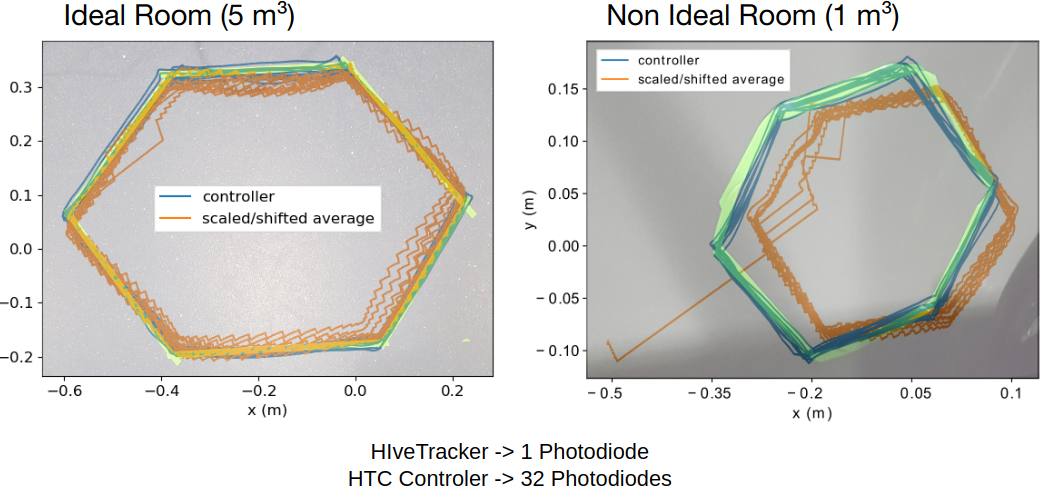
This proof-of-concept, which uses only one photodiode, had an average error on the order of 10 mm more than the average error of a commercial tracker.
Although this approach is not pursued anymore, the code is available :
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.