 Kris Winer
Kris WinerNovember 18, 2019
As Greg mentioned in his log, we are making good progress on the motion co-processor firmware. We are also getting ready for pilot production of the hardware next month and are considering options for the 0.5 x 0.7 in. product board.
The baseline is the same design we have been using for testing, more or less.
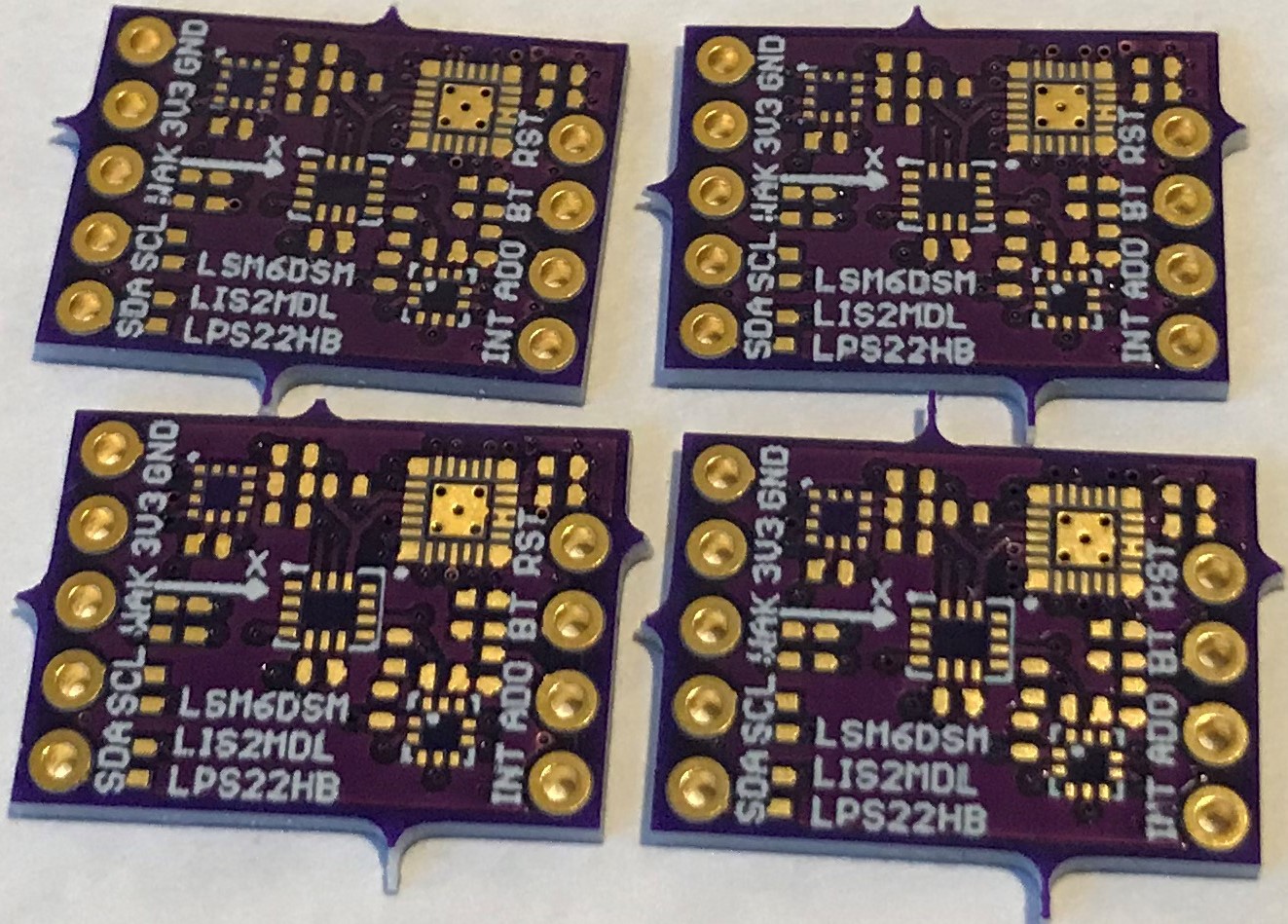
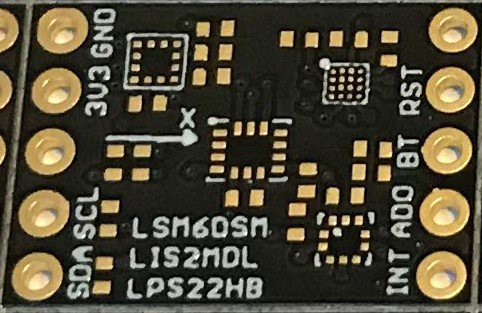
Baseline MAX32660 motion co-processor design pcbs from OSH Park
This design uses the 0.4-mm-pitch, 3 mm x 3 mm MAX32660GTG+ TQFN-24 package (without bootloader) and the LSM6DSM, LIS2MDL, and LPS22HB (10 DoF) sensor suite. We have dropped the 32.768 kHz crystal, since this is only needed if the MAX32660 RTC is required, which it is not in this application. We have also added a bypass capacitor to nRST that eliminates spurious device resets (good practice in any case). We have added 10K pulldowns to the formerly SWD port, one for an I2C address pin and one to put the MAX 32660 into boot mode, which returns these two pins to an SWD port for reprogramming.
The advantage of this design is the inexpensive manufacturing using OSH Park design rules (for 4-layer pcbs). This makes it possible for anyone to easily customize this open-source design for their applications as well as reduce the per-board cost of manufacturing. The disadvantage is the "large" size of the MAX32660 package. This makes it necessary (for this board size) to drop one of the plated through holes, which will complicate mounting onto popular development boards like the Teensy or Dragonfly but should pose no problem for breadboard use.
The alternative design uses the 0.35-mm-pitch, 1.6 mm x 1.6 mm MAX32660GWE+ WLP-16 "flip chip" package (without bootloader).
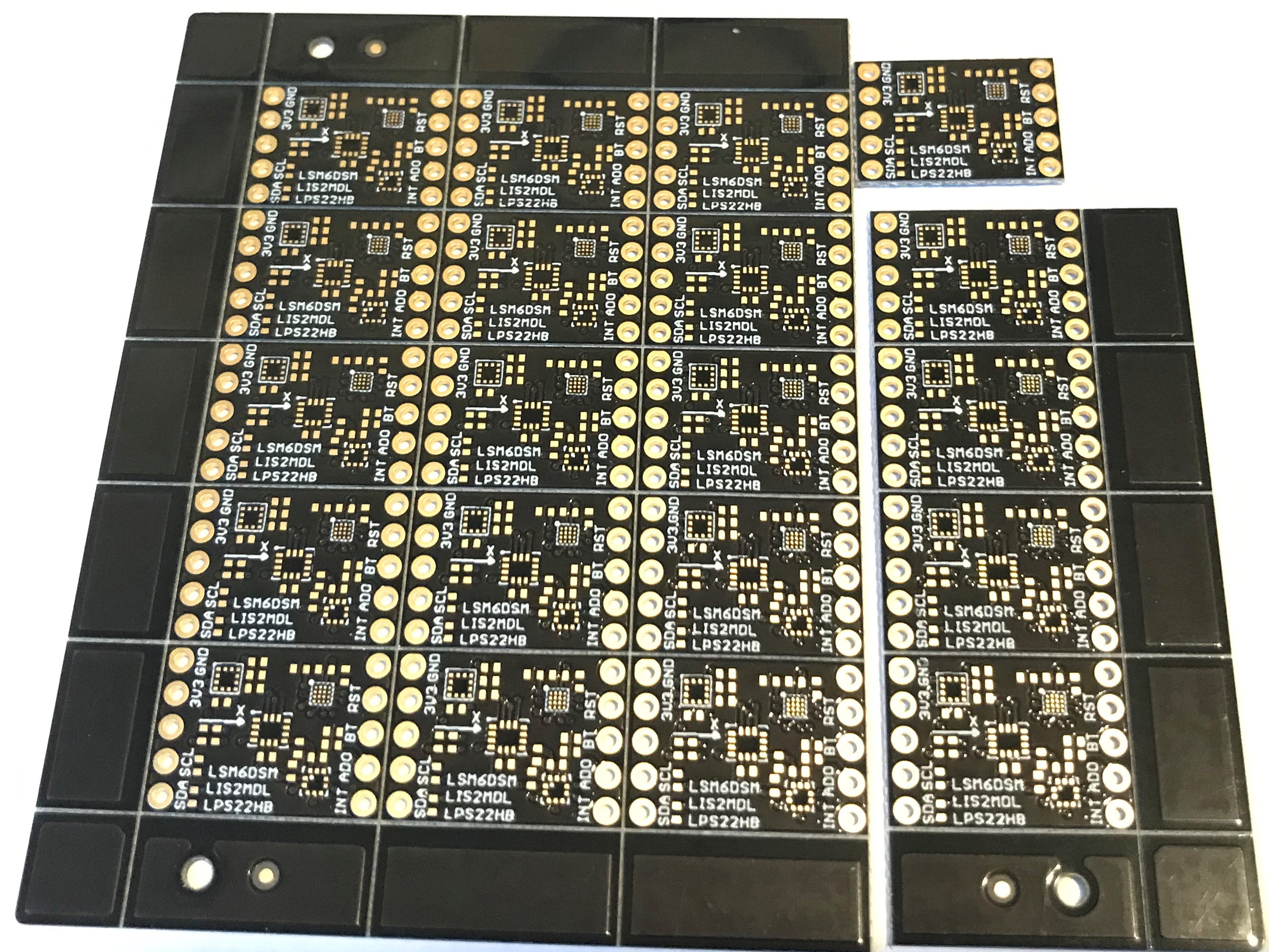
Twenty-board panel from Sunking Circuits.
All 16 of the pins are required for the design including the four internal pins; one is connected to GND and three are connected to SDAM, SWCLK, and host INT. I used EAGLE CAD to design this version and had to violate OSH Park design rules in order to place 3 mil vias onto these three internal pins:
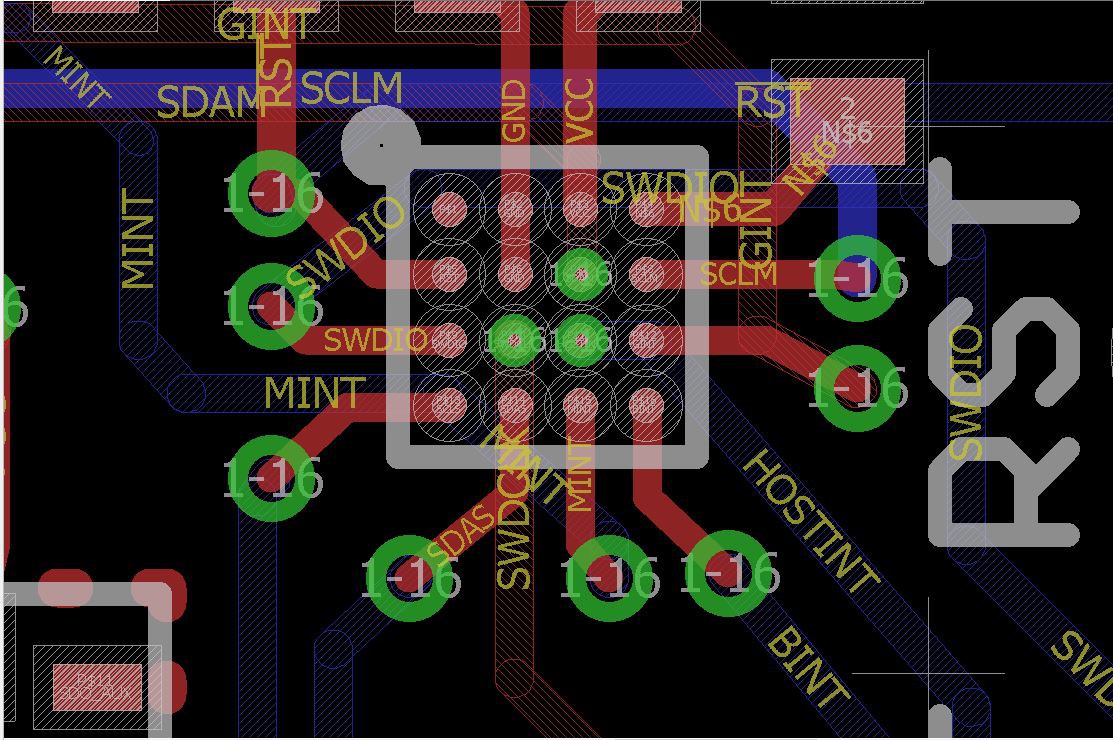
This would never work since the via annuli are too close together. This is an especially difficult part to design with since the pitch is 0.35 mm and the pads are 0.18 mm in diameter, both 10-15% smaller than most other WLCSPs I have dealt with, including the EM7180. Fortunately, I found a cooperative fab house (Sunking Circuits Electronic LTD) who took the design and modified it to conform to their via-in-pad process:
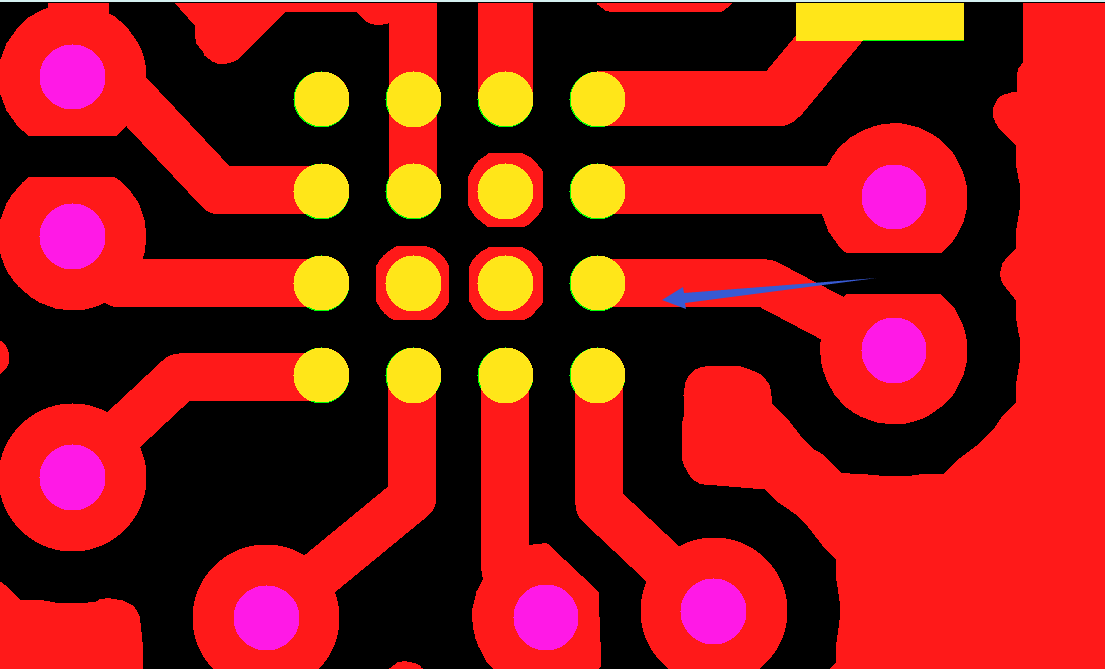
Board layout of the pin pads after rework by Sunking.
According to Sunking "there will be solder mask covering the three rings of the resin plugged vias, the yellow parts will be the exposed pads, their final diameter will be 0.18 mm with a tolerance of +/- 20%."
The first batch had to be scrapped because of some kind of debris in the production process, but I just received the second "good" batch which passed their internal testing and look marvelous:
Close up of the second design option.
The cost was ~$16 per board for 20 of them delivered including the $200 NRE for setup on every new pcb design, high by OSH Park standards but not prohibitive. And certainly much cheaper than I could have had this work done locally in Silicon Valley. This means that if I produce 100 of these at Sunking the pcb cost would likely be about ~$5 per board instead of the ~$1 per board the baseline design might cost.
So this extra cost and the added complexity of the production are definitely a disadvantage. The advantage is that we get back the missing PTH at the board corner, and maybe a cleaner design. Not sure it is worth it. But this was a useful learning experience in that there are many 0.4-mm-pitch WLSCP devices that I would like to be able to use that are now within range of my design abilities and pocketbook.
The next challenge is assembling one or two of these boards and testing them for function. We'll post some comparative testing results in a future log soon.
I am sure we will go to pilot production with the baseline, and I might have 100 of the WLCSP design made just for the fun of it. I expect these MAX32660 motion co-processor boards, which we are calling the USFS-MAX (Ultimate Sensor Fusion Solution) to be for sale on Tindie in January.
Update: Just placed the order for the 100 unit pilot production of the baseline design, which should be delivered for testing by the end of December. Assuming the boards work as expected, these will go on sale at Tindie in January.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.