After putting together first version of Ariadne Headband and successfully testing it we were pleased how well it worked but as it is with every first prototype it was far from perfect. When we have shown our first version to Daniel he pointed out few things. Namely that he would appreciate some kind of buzzer signalizing when the headband is turned on. He also mentioned that he would like to be able to turn off navigation by pressing button rather than turning it off automatically when you are turned the right direction.
We took note of his remarks and revised our first prototype. We have added a piezo buzzer between arduino’s pin number five and ground. It plays simple melody when headband is turning on. We have added function to push-button which was already present. When you press the push-button while vibration motors are active you turn them off if vibration motors are inactive it turns them on. It added interesting side effect if you haven’t sent coordinates to headband yet and pressed the push-button the headband starts navigate you to the north.
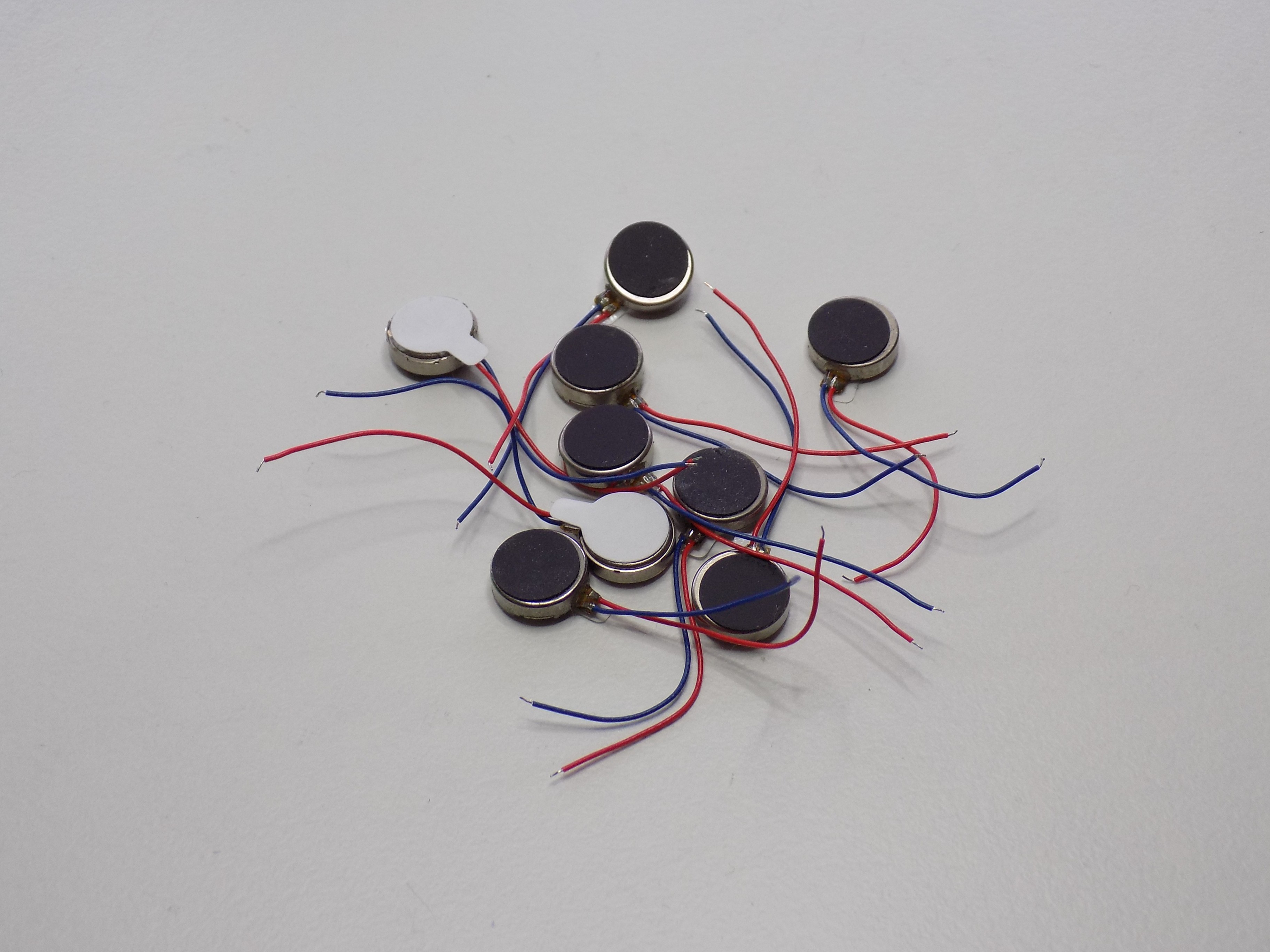
Other change was remaking the headband containing vibration motors. We have replaced original vibration motors with LEDs in 3D printed housings with flat, coin like vibration motors which you can see in the picture above and mainly adding a connector to it. So now you can separate box with electronics and headband and instead of it connect for example hat in winter or cap containing vibration motors. On the back of the electronics box and headband are Velcro fasteners for quick and easy attaching desired wearable.
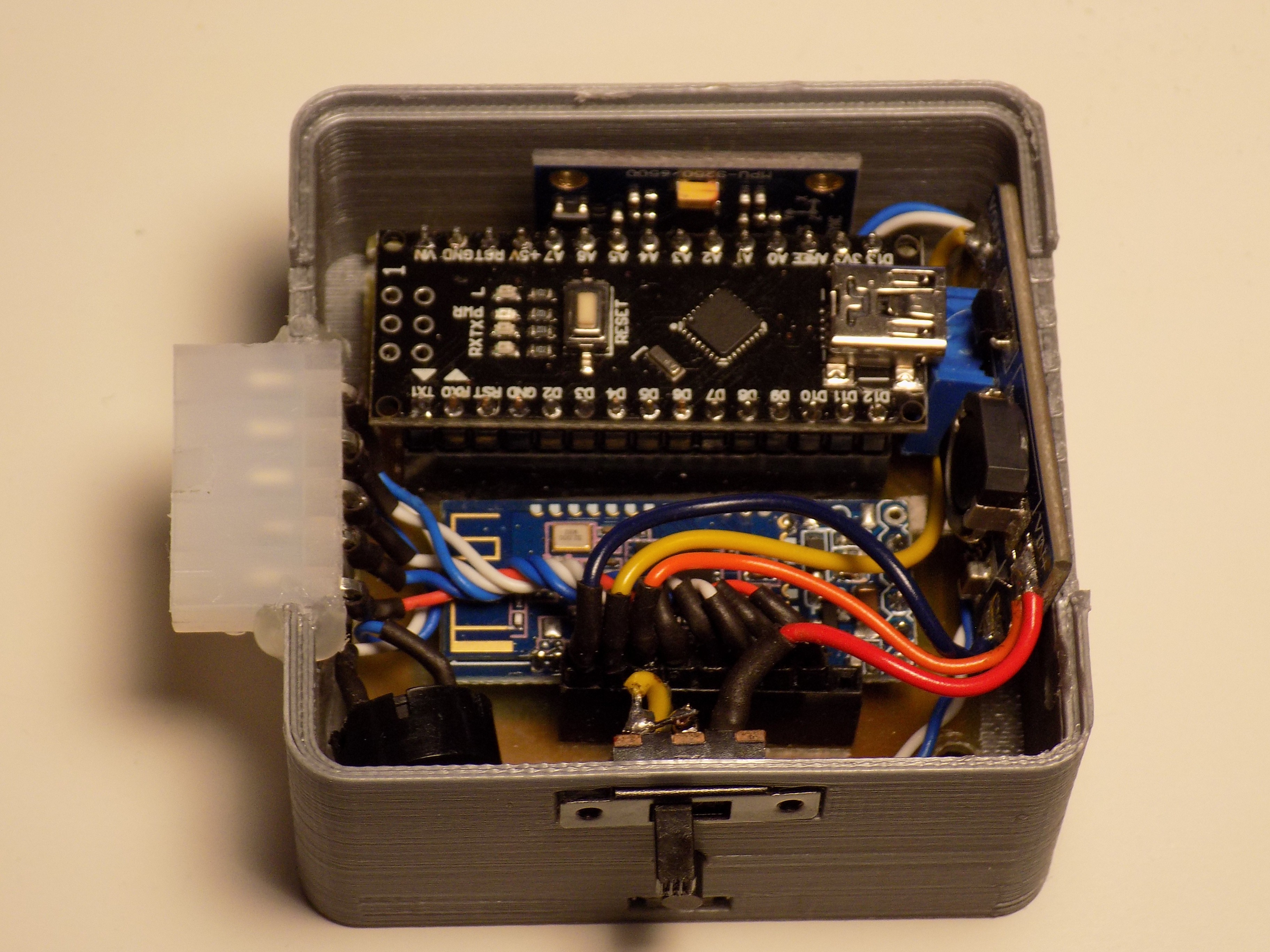
We have also switched HC-06 bluetooth module for HM-10 bluetooth low energy module to lower power consumption and increase battery life. This required no changes in arduino’s software just swapping modules on PCB. Bluetooth wasn’t the only module we’ve changed we have also swapped GY-271 compass module for MPU-9250 which is three-axis compass, accelerometer and gyroscope in one module. Combination of compass and accelerometer should allow us to alter compass data in such way it would compensate any tilt of the device and give accurate reading of the azimuth even when tilted. You can see MPU-9250 in the image below.

In hardware switching compass modules was pretty easy. Although MPU-9250 has more than twice as much pins as GY-271 we only use power and I2C pins which are placed in the same order on both modules. So it was just desoldering one module and soldering back the other instead. In software we had to change I2C addresses, in MPU-9250 accelerometer and gyroscope are one unit and compass other and each has its own I2C address.
We have received MPU-9250 not a long time ago and time being scarce commodity nowadays means we weren’t able to fully utilize its abilities yet. Right now the new compass modules does the exact thing as the old one. However we are working on being able to compensate tilt of the compass a thus increasing its accuracy.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.