 Lee Djavaherian
Lee DjavaherianIntroduction
The Mysterious Wave Pulse
Five Most Important Factors
The Problem With Using Acceleration Pulses to Send Morse Code
Motor Feedback
Inverting the Morse Sequence
The Algorithm and Decoder
Parallel Operation Using a Single Pin and Bus Protocol
Minimal Power, Memory, and CPU
Configuring the LIS3DH
LIS3DH Register Settings
Optional Snail Cam or Escapement Anchor
How I Use THUMP
Conclusion
Introduction
First, please let me clarify that, at this time, THUMP is in no way suitable for critical emergency situations. It is an experimental subsystem that I built to communicate and control a small, solar-powered, self-propelled, tethered robotic radio platform, in cases where its primary radio systems go down. But such a system could be applied to a variety of different types of craft, and building it has provided fascinating insights.
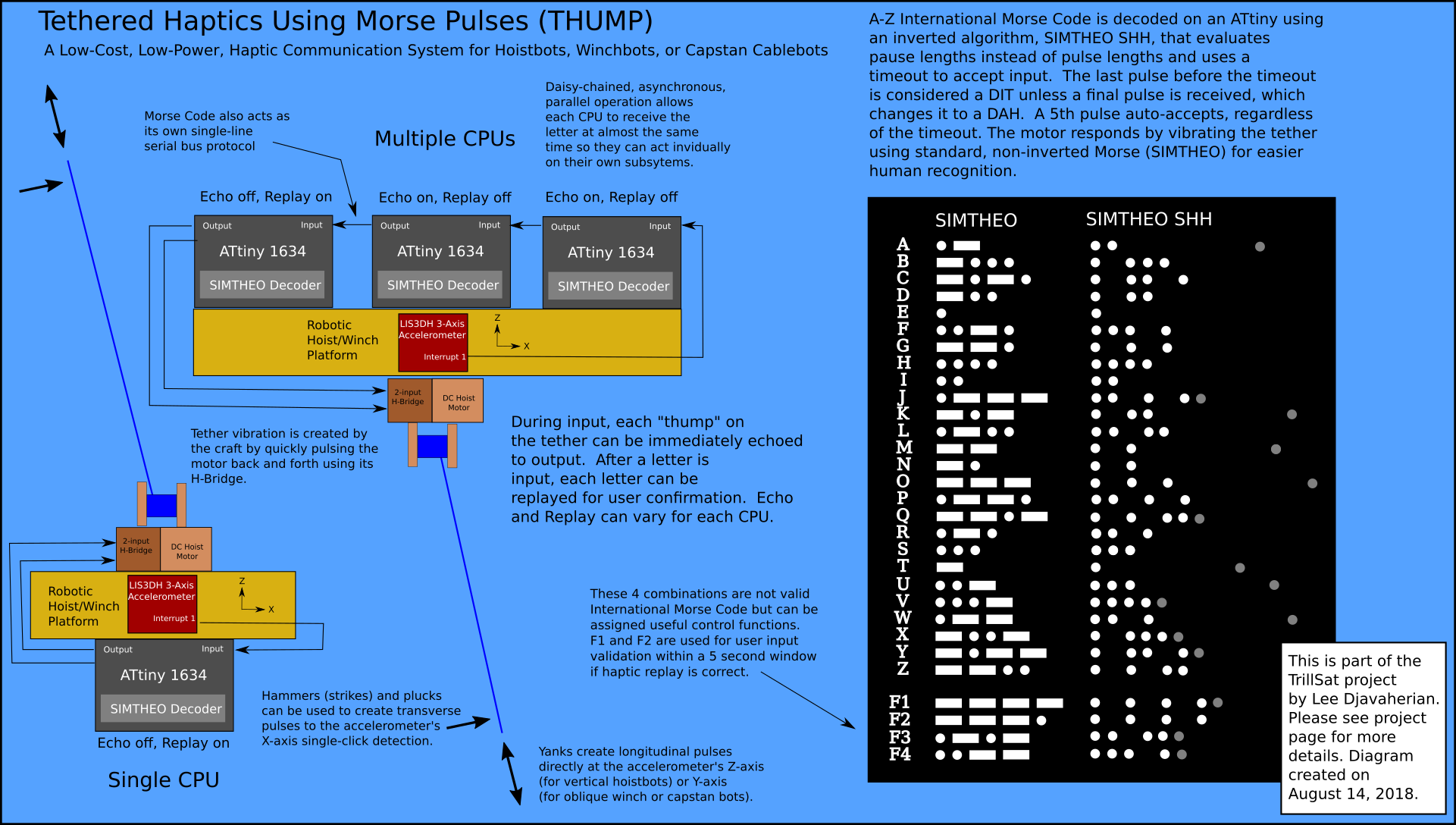
THUMP is a low-cost, low-power system that uses a subset of International Morse Code for the full A-Z alphabet. And instead of only hoisting something up or down, as in the helicopter/diver example, robotic hoists can also be inverted, anchored at one end, and the hoist platform itself can be instructed to move up or down (a vertical hoistbot, or a horizontal/oblique winchbot or cablebot) turning it into a tethered flying, or even submersible, craft. THUMP requires only a 3-axis accelerometer interrupt for sensing and uses the hoist/winch motor for haptic pulse generation. The operator simply "thumps" the tether (hammering, plucking, or yanking) to instruct the robot to move or perform any desired function within its capabilities, and the machine vibrates back a response. A resource-efficient Morse code algorithm and decoder was created for an ATtiny microcontroller, which can also be daisy-chained to multiple microcontrollers for asynchronous, parallel operation in more complex cases where different CPUs control different subsystems (which was the case with my prototype). It creates its own serial bus protocol (using Morse, of course!) and has zero reliance on other protocols, which is nice.
Ebb and flow, flotsam and jetsam, dits and dahs... A traditional hoistbot with a winch and take-up reel is kind of like a helicopter, but TrillSat is a little different. It's an oblique capstan-driven cablebot, anchored at both ends, that sails, on what I like to call, a "tether sea". When using the tether for capstan locomotion, the craft acts like a buoyant ship or airship on a medium, but when the tether is used for Morse code communication, THUMP shows that the tether really is a distinct medium. Think of the armed forces of different countries, for instance. They are usually divided into mediums or their absence/combinations (land, air, water, and maybe even space). And even in space, both end-over-end rotation and "gravity-gradient stabilization" can keep a tether taut, and because the tether is the medium, a gas is not needed for wave propagation. Each medium has unique characteristics that have to be understood, and the tether has unique characteristics.
And, interestingly, many of these characteristics have been understood for centuries, since a simple 1-dimensional tether, anchored at both ends, form a vibrating string which has provided musicians, mathematicians and physicists a simple way to discover and study WAVES. And the corpus we have on this subject is immense (and a joy to research), but I do not claim to be an expert. Waves are hard, even for musicians to master, and much of our academic understanding lies in the oscillating, dynamic world of differential equations. I'm neither a musician nor a physicist, but I do have a good grasp of logical information processing, and so I use my discrete tools, as best as I can, to bound and observe those wiggly, squiggly things.
THUMP is actually the fourth human-computer interface in #TrillSat . TrillSat's primary...
Read more »
 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠

 Matthias Kampa
Matthias Kampa
 Luke Thompson
Luke Thompson