 MrDreamBot
MrDreamBotYou can find out more about HiCAT Livera here. I finally have all the components that I need to start Phase 2. The Livera and Motor Driver are shown below:
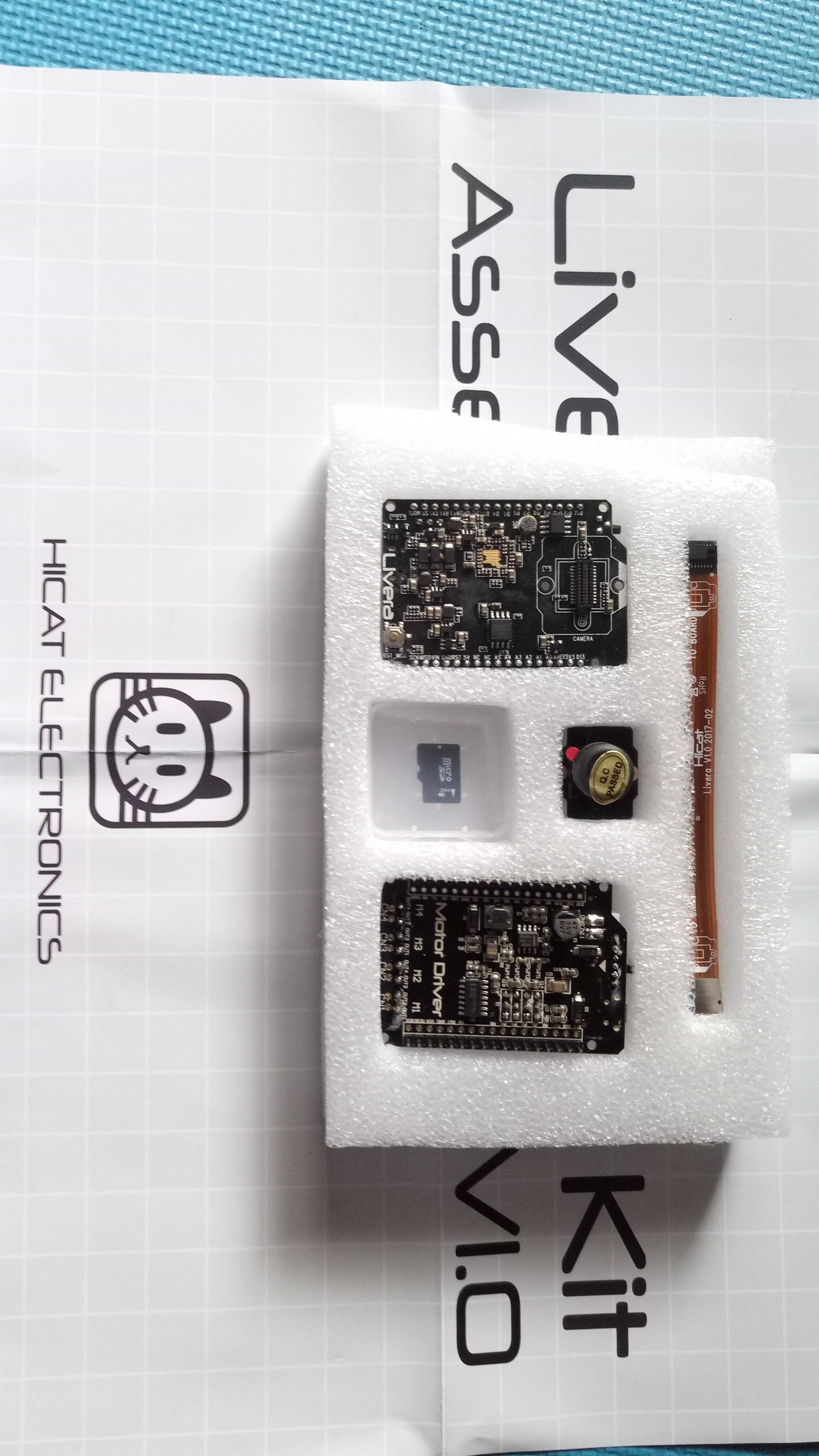
The objective of this Phase is to convert the Meccano MAX into a vision-based robot using HiCAT Livera and its accompanying Motor Driver. Although the Meccano MAX already has motors for locomotion, the Motor Driver is a convenience board which provides voltage step down, servo connectors (which I am going to use for digital output to drive the 3 chains of MAX devices: motors, servos and Face. I am also going to use the Motor Driver’s motor capability to power a laser for effects.
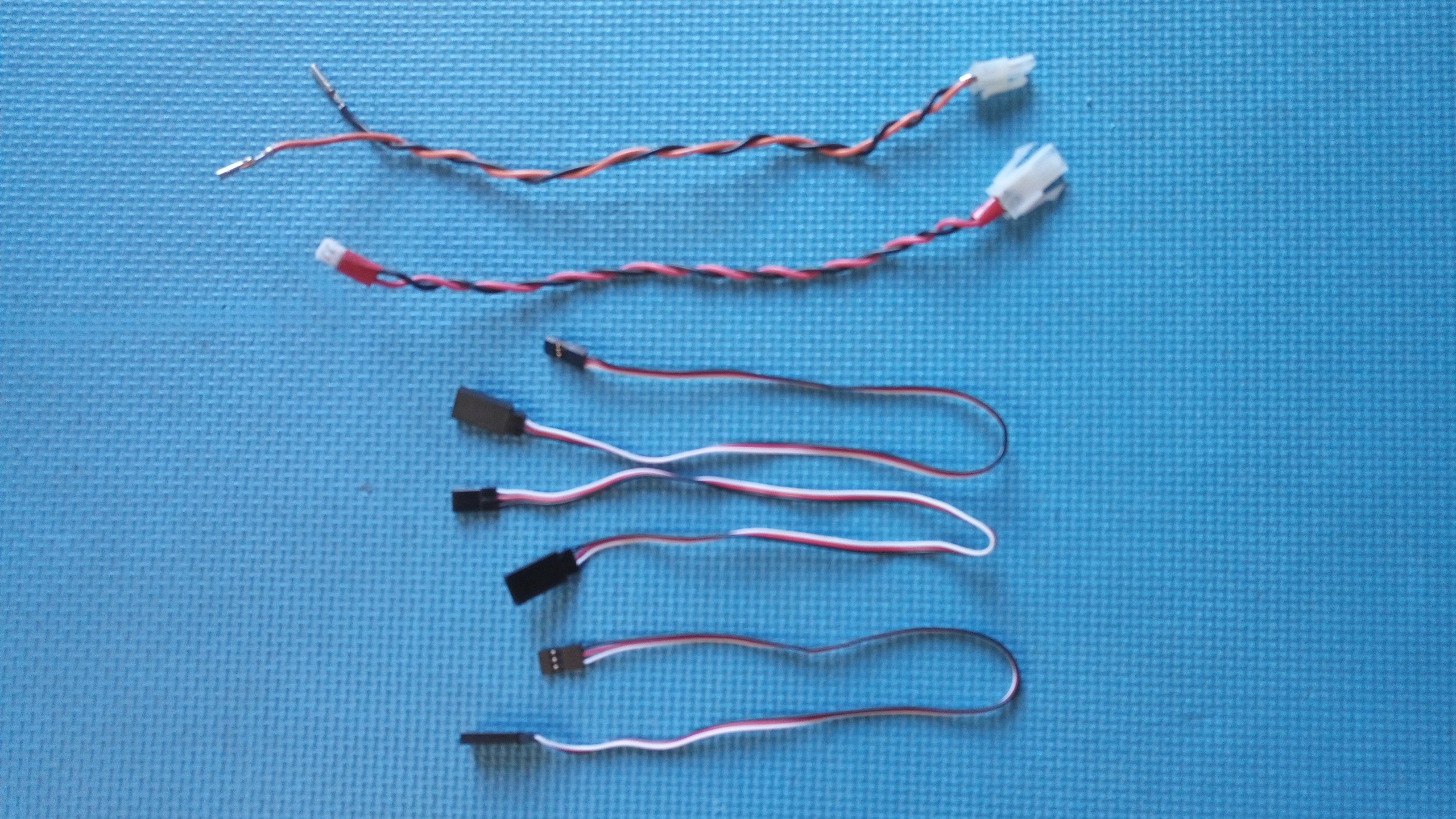
First thing first. I need 2 power cables to connect to the Meccano Max: one to connect to the battery another the other to a smart power supply which also measures the current used. I also need 3 servo cables to connect the Meccano Max’s devices to the Motor Driver’s servo connectors. These cables are shown in the following photo.
The following photo shows the connection between the Livera/Motor Driver with a power source and the Meccano Max.
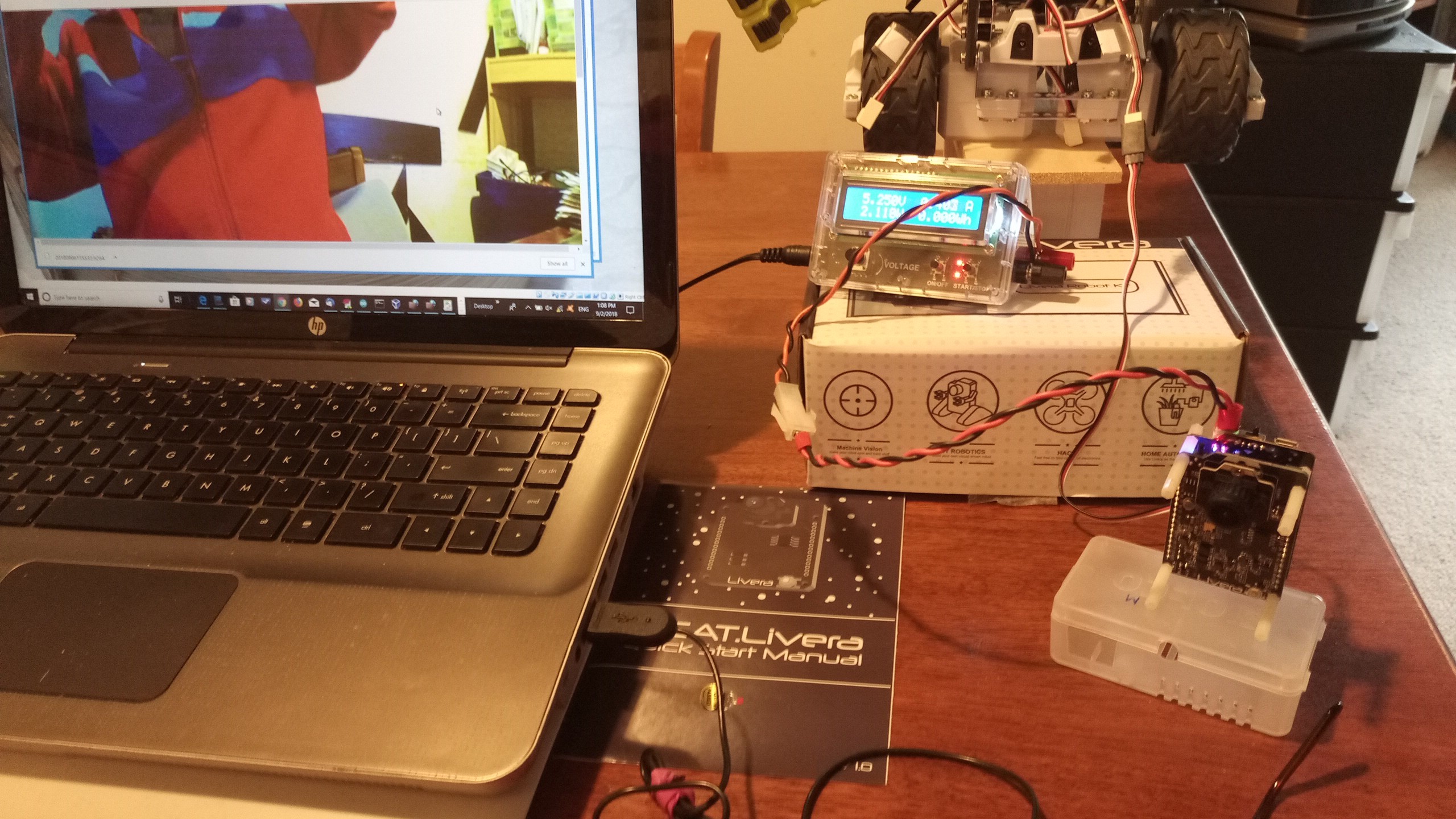
When first powered up, the Livera comes up in what HiCAT calls the AP mode which is basically a hotspot at 192.168.1.1. I then pointed my browser at Livera’s webapp: http://192.168.1.1/mmc/webapp/index.html, changed to MJPEG mode and selected LiveView. You can see me on the computer screen. This is all the success I am getting so far. I had no luck trying the other features of the webapp:
-
Changing the WIFI to AD mode (HiCAT's term for connecting Livera to your own router the AD mode) – I did that. It gets an IP address from my router (seen on the router) but webapp no longer responds to any request: webapp or telnet anymore. Resetting to AP mode works but I still can’t connect it to my router and access it using my PC connected to the same network.
-
Changing to Robot mode – nothing happens. Yes, I’ve replaced the Arduino sketch for the HiCAT robot with my sketch for the Meccano Max. I even added the Laser. No luck. I shall try HiCAT’s sketch later to see if I can, at least, get the laser working. If it does, it means that the problem is with my sketch otherwise it is a Livera problem.
This is as far as I get with a quick test drive of Livera/Motor Driver. I need to spend more time RTFM.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Perfect, I would like to be able to place a camera on my MAX robot ..
Are you sure? yes | no