 Josh Starnes
Josh Starnesimport RPi.GPIO as GPIO import math import os from datetime import datetime from time import sleep # This is for revision 1 of the Raspberry Pi, Model B # This pin is also referred to as GPIO23 INPUT_WIRE = 16 GPIO.setmode(GPIO.BOARD) GPIO.setup(INPUT_WIRE, GPIO.IN) while True: value = 1 # Loop until we read a 0 while value: value = GPIO.input(INPUT_WIRE) # Grab the start time of the command startTime = datetime.now() # Used to buffer the command pulses command = [] # The end of the "command" happens when we read more than # a certain number of 1s (1 is off for my IR receiver) numOnes = 0 # Used to keep track of transitions from 1 to 0 previousVal = 0 while True: if value != previousVal: # The value has changed, so calculate the length of this run now = datetime.now() pulseLength = now - startTime startTime = now command.append((previousVal, pulseLength.microseconds)) if value: numOnes = numOnes + 1 else: numOnes = 0 # 10000 is arbitrary, adjust as necessary if numOnes > 10000: break previousVal = value value = GPIO.input(INPUT_WIRE) print "----------Start----------" for (val, pulse) in command: print val, pulse print "-----------End-----------\n" print "Size of array is " + str(len(command))
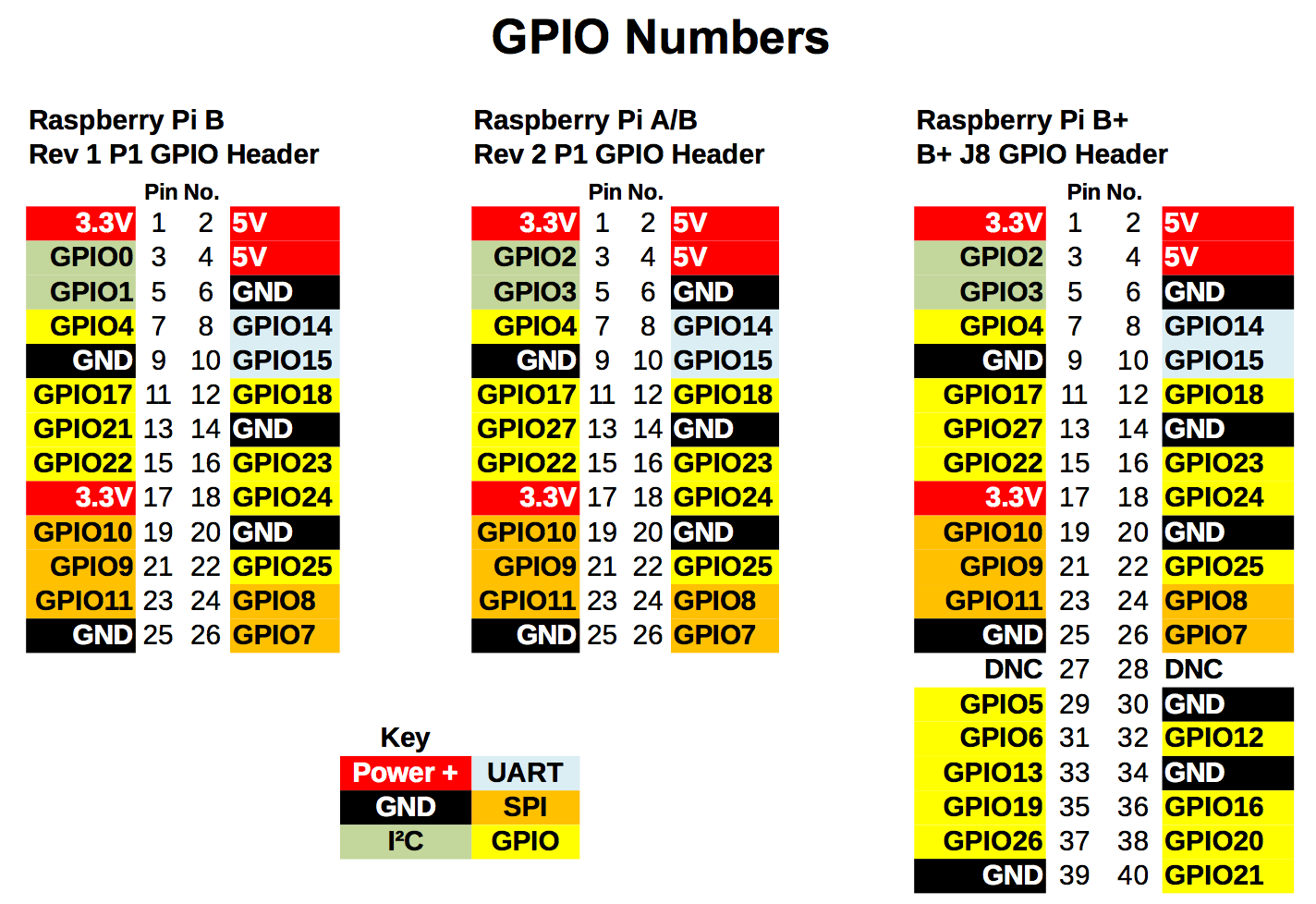
Raspberry Pi GPIO pin layout for reference. This script uses pin #16, or GPIO23
It just runs in an infinite loop, waiting for a 0 to be read from the infrared receiver. It'll then take note of the time and keep reading 0s and 1s, each time making note of how long a run of 1s or 0s was. Once it reads 10,000 1s, it decides the command has probably ended and returns to the top of the loop. 10,000 is arbitrary and could differ depending on your Pi's CPU speed or other factors, so you may need to adjust it. Once the command has ended, the script will print out the pulses and their durations. Here's some sample output when I ran the script and pressed my light switch remote:
0 8982 1 4399 0 631 1 497 0 628 1 1607 0 635 1 490 0 629 1 509 0 627 1 500 0 633 1 500 0 625 1 500 0 624 1 1623 0 629 1 1605 0 622 1 501 0 626 1 1606 0 628 1 1606 0 631 1 499 0 634 1 1605 0 661 1 1569 0 632 1 504 0 626 1 498 0 627 1 1615 0 620 1 496 0 635 1 1614 0 629 1 1599 0 629 1 504 0 625 1 505 0 623 1 516 0 627 1 1598 0 631 1 501 0 625 1 1606 0 627 1 501 0 636 1 496 0 626 1 1609 0 630 1 1606 0 628 1 1607 0 623
I was thrilled to find this matches up very nicely with the NEC protocol! You can see the 9 ms pulse at the beginning, followed by the 4.5 ms gap. The script is off by several hundred microseconds but it's close enough to see what's going on. The next step is to convert this series of pulses to binary.
The basics of the NEC protocol are simple:
- A "logical 0" is a 562.5 microsecond pulse, followed by a 562.5 microsecond gap.
- A "logical 1" is a 562.5 microsecond pulse, followed by a 1687.5 microsecond gap.
Keep in mind that in my pulse list above, a 0 is a pulse, and a 1 is a gap. So to start, chop off the leading 9 ms pulse and the 4.5 ms gap and then read the lines two at a time. The first two entries are:
0 631 1 497
That's a roughly 565 pulse followed by a 565 gap, so this is a 0. Next is:
0 628 1 1607
A 565 pulse followed by a 1687 gap (you can start to see why the numbers don't need to be exact). This is a 1. Next:
0 635 1 490
565 pulse followed by a 565 gap, that's a 0. And so on. Notice the signal also has a trailing 565 pulse at the end. Some signals have this, some don't, but the NEC protocol suggests that the signal should have it. We end up with
01000001101101100101100010100111
I did this one by hand, but for my air conditioning remote, you can imagine it getting tedious. The algorithm to convert these pulses into binary is pretty straightforward and it's simple enough to adapt our Python script to do it for us. We can use the heuristic that any gap over 1000 microseconds is likely a logical 1, otherwise it's a logical 0. Looking at the data, we can see that this is sufficient to distinguish the two. You could even write a cutesy one-liner to convert this "command" array into a binary string:
binaryString = "".join(map(lambda x: "1" if x[1] > 1000 else "0", filter(lambda x: x[0] == 1, command)))
In the script, command is an array of tuples of the structure (pulse_value, pulse_duration) where pulse_value is a 0 or 1, and pulse_duration is an integer in microseconds. We filter this array to only include the gaps (x[0] == 1) because the gap is what distinguishes a 1 from a 0. Then we map all gaps with a duration (x[1]) greater than 1000 to be a "1", otherwise a "0". All those 1s and 0s are then joined together to form the binary string.
If we group this binary string into bytes, we can see the structure of the signal a little more easily:
01000001 10110110 01011000 10100111
One thing the NEC protocol mentioned is that the second byte should be the inverse of the first, and the fourth byte an inverse of the third. At first I thought I did something wrong, but it turns out my remote doesn't follow the standard. So that's great! We decoded the signal, and it even looks like an NEC protocol infrared signal. At this point, to test that I decoded it correctly, I wanted to run the command through LIRC (Linux Infrared Remote Control). This package lets you define static commands in hexadecimal in a config file, and then you can send them from the command line.
Here's the conversion of the binary string to both decimal and hex
Binary Decimal Hex 01000001 65 41 10110110 182 B6 01011000 88 58 10100111 167 A7 Final: 0x41b658a7
Sending the IR signal
In order for infrared to work properly, you need a pretty consistent 38 kHz signal to be generated. That means you need to go through an entire on/off cycle every 1/38000 seconds, or roughly every 26 microseconds. That's no problem, you think. Even the first Raspberry Pi had a 700 MHz CPU, more than fast enough to change a pin on and off at 38 kHz. But you don't get all that 700 MHz to yourself. You have to run the OS, which takes quite a sizable chunk of that processing speed away. Then you have the fact that you're running Python, an interpreted language that might run a garbage collector at any time, delaying your code unpredictably. And even a compiled program written in C or C++ could be interrupted by the operating system, as your program is not the only thing running and the OS will stop your program to give other programs a chance to run. So you might get the correct speed with C, but the OS interruptions means you won't get a consistent wave, and thus the signal won't work, or it won't work reliably.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.