 siddharth.c
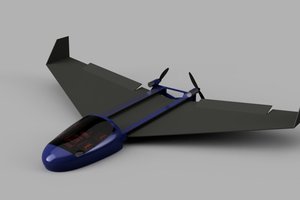
siddharth.cA basic 3D printed hovercraft frame that I designed on a 3d modelling software .
I put 7 mm DC brushed motors as the actuators with 55 mm bi-blade props.
The setup is a 1s 3.7v setup that used a 600 Mah battery with a disharge rating of 45C. Its an agile setup thats extremely fun to handle .
I used the Primus X flight controller to mimic the drone stabilising features to easily control the craft.
I added two extra motors that I used on the ports supporting H bridge to get the reverse function by reversing the prop spin .
I used the simple API based SDK that was offered with Primus X called Cygnus IDE .
To open drone experimentation to the world, Drona Aviation are crowdfunding for PlutoX on Indiegogo. Support them and help them bring it to life: https://www.indiegogo.com/projects/plutox-turn-your-drone-ideas-into-innovations/reft/18075774/tinkerers






 Anas Raza Khan
Anas Raza Khan
It looks like it is a Pluto X Flight Controller. Nice build. Please report more.